2. Способ по п. 1, отличающийся тем, .что в случае выпол-нения квадратурной корреляционной фильтрации на цифровой основе с синхронным квантованием опорного колебания по принципу трех уровней
-1,0+1 сдвиг интервала инуегрирования при повтооной фильтрации осу- . ществляют добавлением одного такта квантования в начале ( конце ) цикла накопления и изъятием одного такта квантования . в конце /начале) цикла накопления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВАРИАЦИЙ ФАЗОВОГО СДВИГА ЦЕНТРАЛЬНОЙ ЧАСТОТЫ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524673C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2549207C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2550757C1 |
| СПОСОБ ОБРАБОТКИ СЛОЖНОГО СИГНАЛА ПРИ ЕГО ОБНАРУЖЕНИИ | 1984 |
|
SU1840151A1 |
| СПОСОБ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 2015 |
|
RU2596018C1 |
| Способ измерения задержки радиосигналов | 2016 |
|
RU2620131C1 |
| СПОСОБ ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2012 |
|
RU2486683C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ СИГНАЛА | 2003 |
|
RU2239842C1 |
| Устройство для корреляционного приема фазоманипулированных сигналов с подстройкой частоты | 1984 |
|
SU1221762A1 |
| Цифровой измеритель комплексных параметров напряжения | 1977 |
|
SU711480A1 |
1. СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДЫ И ФАЗЫ РАДИОСИГНАЛА, основанный на квадратурной корреляционной фильтрации с перемножением исследуемого радиосигнала на синусную и косинусную составляющие опорного колебания, интегрированием полученных произведений в течение конечного интервала времени, извлечение корня квёщратиого из суммы квадратов результатов интегрирования и определении угла, соответствующего тангенсу отношения последних, отличающийся тем, что, с целью повышения точности измерения, упомянут ю фильтрацию осуществляют повторно с тем же интервалом интегрирования, но сдвинутым по отношению к ранее выбранному на четверть периода опорного колебания, величину угла, определенного впроцессе повторной фильтрации, корректируют на угол, равный произведению периода на четверть относительного отклонения частоты радиосигнала от частоты опорного колебания, искомую амплитуду находят путем суммирования двух полученных результатов извлечения квадратного корня, а искомую фазу - § путем выделения среднего арифметичес(Л кого между углом, определенным в процессе первой фильтрации, и углом, скорректированным после осуществления повторной фильтрации. 4 з: X) .lib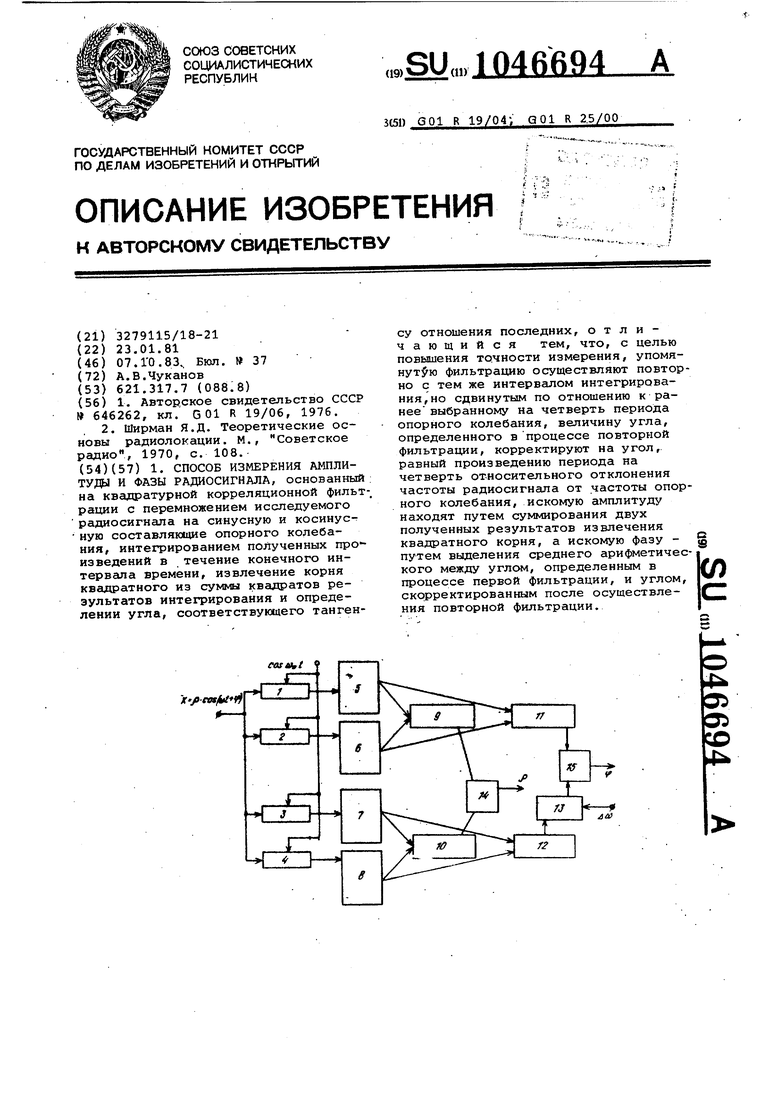
Изобретение относится к области электрических измерений и предназна чено для использования в радиолокации, радионавигации и других отраслях, где требуются точные измерения параметров радиосигналов. Известен способ измерения амплитуды и фазы радиосигнала, предусмат ривающий корреляционную обработку перемножением исследуемого радиосигнала на опорное колебание. В это способе амплитуда радиосигнала определяется при заданной амплитуде опорного колебания, а фаза - относительно фазы последнего . Недостаток известного способа связан с возникновением ошибки из мерения при некратном соотношении между интервалом интегрирования и периодом образующего сигнала с суммарной частотой, складываквдейся из частоты исследуемого радиосигнала и опорного колебания. Наиболее близким к изобретению является способ измерения амплитуды и фазы радиосигнала, заключающийся квадратурной корреляционной фильтрации с перемножением исследуемого радиосигнала на синусную и косинусную составляющие опорного колебания интегрировании полученных произведений в течение конечного интервала времени и нахождении искомой ампл1Утуды путем извлечения корня квадрат ного из суммы квадратов результатов интегрирования, а искомой фазы путем определения угла, соответст-. вующего тангенсу отношения последних . Недостаток указанного способа проявляется в том, что- компенсация ошибок некратности происходит тольк при частоте исследуемого радиосигна ла равной частоте опорного колебани При отклонении ; расстройке) частоты радиосигнала кратность между интервалом интегрирования и периодом образующегося сигнала с суммарной час тотой радиосигнала и опорного колеб ния нарушается и возможные ошибки не компенсируются. Цель изобретения - повышение точ ности измерения за счет обеспечения компенсации ошибок некратиости при отклонениях частот исслелуемого радиосигнала от частоты опорного колебания. Поставленная цель достигается тем, что в способе измерения амплитуды и фазы радиосигнала, основанном на квадратурной корреляционной фильтрации с перемножением исследуемого радиосигнала на -синусную и косинусную составляющие опорного колебания, интегрировании полученных произведений в течение конечного интервалавремени, извлечении корня квадратного из суммы квадратов результатов интегрирования и определении угла, соответствующего тангенсу отношения последних.упомянутую фильтрацию осуществляют повторно с тем же интервалом интегрировани но сдвинутым по отношению к ранее выбранному на четверть периода опорного колебания, величину угла, определенного в процессе повторной фильтрации, корректируют на угол, равный произведению периода на четверть относительного отклонения частоты радиосигнала от частоты опорного колебания, искомую амплитуду находят путем суммирования двух полученных результатов извлечения квс1Дратного корня, а искомую фазу - путем выделения среднего арифметичес кого между углом, определенным в. процессе первой фильтрации, и углом, скорректированным после осуществления повторной фильтрации. В случгю в ыполнения квадратурной корреляционной фильтрации на цифровой основе с синхронным квантованием опорного колебания по принципу трех уровней -1,0+1 сдвиг интервала интегрирования при повторной фильтрации осуществляют добавлением одного такта квантования в начале (, конце) цикла накопления и изъятием одного такта квантования в конце (начале) цикла накопления. На чертеже представлена структурная схема устройства, реализующего предложенный способ измерения амплитуды и фазы радиосигнала. Устройство содержит два квадратурных корреляционных фильтра с включенными на входах блоками умножения 1 и 2 и 3 и 4 исследуемого радиосигнсьла X-pcos((t)t4-V) на синус- ную Sih uipt и косинусную co.u/ot составляющие опорного колебания
( Р, Ч, си - амплитуда, начальная фаза и частота радиоимпульса; ОУо частота опорного колебания, интеграторами 5,6 и 7,8, входы которых подключены к выходам блоков 1-4 умножения, блоками 9 и 10 возведения
в квадрат, суммирования и извлечения квадратного корня, входа которых соединены с выходами интеграторов 5-8, блоками 11 и 12 определения отношений результатов извлечения квадратного корня и углов, соответствующих этим отношениям, входы которых также соединены с выходами интеграторов 5 - 8. В состав устройства входят, кроме того, блок 13 угловой корректировки, вход которого подключен к выходу блока 12, блок 14 суммирования, входы которого соединены с выходами блоков 9 и 10 , и 6/1ОК 15 выделения среднего арифметического, входы которого подключены к выходам блоков 11 и 13.
Интервалы интегрирования интеграторов 5 и 6 выбраны равными Т , а
интеграторов 7 и 8 - со сдвигом Т /ЙЦ/{ Угловая коррекция uiM, осу-.
ществляемая блоком 13, соответствую
- -1 лш
ет л$ «-2ЯС- -- 1 где ли;- отклонение ( расстройка)частоты w радиосигнала от частоты) CJUfl опорного колебания.
Предложенный способ реализуется спедую1цим образом.
При поступлении на вход устройства исследуемого радиосигнала X, на выходах блока 1 и 3 умножения вырабатывгиотся сигналы KSinCWof/ а на выходах блоков 2 и 4 - сигналы XCOSUiflt. В интеграторах 5-8 производится интегрирование указанных, сигналов. В результате на выходе интегратора 5 формируется напряжение т;,2 .
А ; r-XS1 iyyo-t.afc, -Г/1
на выходе интегратора 6 - напряжение
B«-i.r )(.COeU)o-t.dtj. Л|1
на выходе интегратора 7 - напря. ® ®f-C/ 2-TC/U%
АО. 4Г iwtto -d-fc
Па-тс/саь
и на выходе интегратора 8 - напряжение
T|i-Tt|2u;o ncoetw t t -Tli-i liiVo
Полученные интегральные напряжения AI , В и А2., Bj. подаются
на входы соответственно блоков 9 и 10 возведения в квадрат, суммирования и извлечения квадратного корня. После осуществления соответствующих преобразований на выходах
указанных блоко образуются сигналы У А 4-В , суммирование которых в блоке 14 позволяет найти искомую амплитуду Р исследуемого радиосигнала.
Полученные интегральные напряжения А, В и А,, В подаются также на входы соответственно блоков 11 и 12 определения отношений и углов , соответствующих отношениям. После осуществления соответствукюдах
преобразований на выходах указ.гшных
блоков образуются сигналы QrCtoir
la: А-1
и -д- . .Последний из низ кбрректируется в блоке 13 на угол
u(ju
-2Tf-. Выделение в блоке 15
Ш
среднего арифметического между выходными сигналами 11 и 15 позволяет найти искомую начальную фазу Ч исследуемого радиосигнала.
Предложенный способ основывается, таким образом. На положении, согласно которому сдвиг интервала интегрирования в фильтре в любую сторону на половину периода суммы несущей частоты радиосигнала и частоты опорного колебания предопределяет изменение знака ошибки некратности на 5 противоположный. Это вытекает из следующего соотношения:
)
г J PCOS (ujt-nf)cosu;oi 3t 9
rcoSuCytai-v
ОТ
чг
-ГЦ
+г/7 Г cos (iUJ 1tt;o)d-b,
-Г|2
в котором указанная ошибка отображается вторым интегралом.
При обработке исследуемого радиосигнала в цифровой форме, когда его квантование производится синхронно с квантованием опорного колебания по принципу трех уровней -1,0, +1 и такт TK.B квантования выбирается по формуле «и; fjj;
НС
аи;,
ил,
требуемый сдвиг ДТ интервала интегрирования в интеграторах 7 и 8 достигается сдвигом на один такт квантсг 5чия для любого значения коэффициента К. Величина д угловой коррекции вычисляется при этом по
формуле Tt до;
-T-T C iK..).
Преимущество предложенного спо5 соба перед известными заключается
1046694
в том, что он позволяет получить ав-опорного колебания-и обеспечивает
томатическую компенсацию ошибок краттем самым ;ущественное повышение
ности при отклонениях частоты иссле-точности измерения амплитуды и фазы
дуемого радиосигнала от частотырадиосигнала.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство измерения ортогональных составляющих сигнала | 1976 |
|
SU646262A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ширман Я.Д | |||
| Теоретические основы радиолокации | |||
| М., Советское радио, 1970, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
