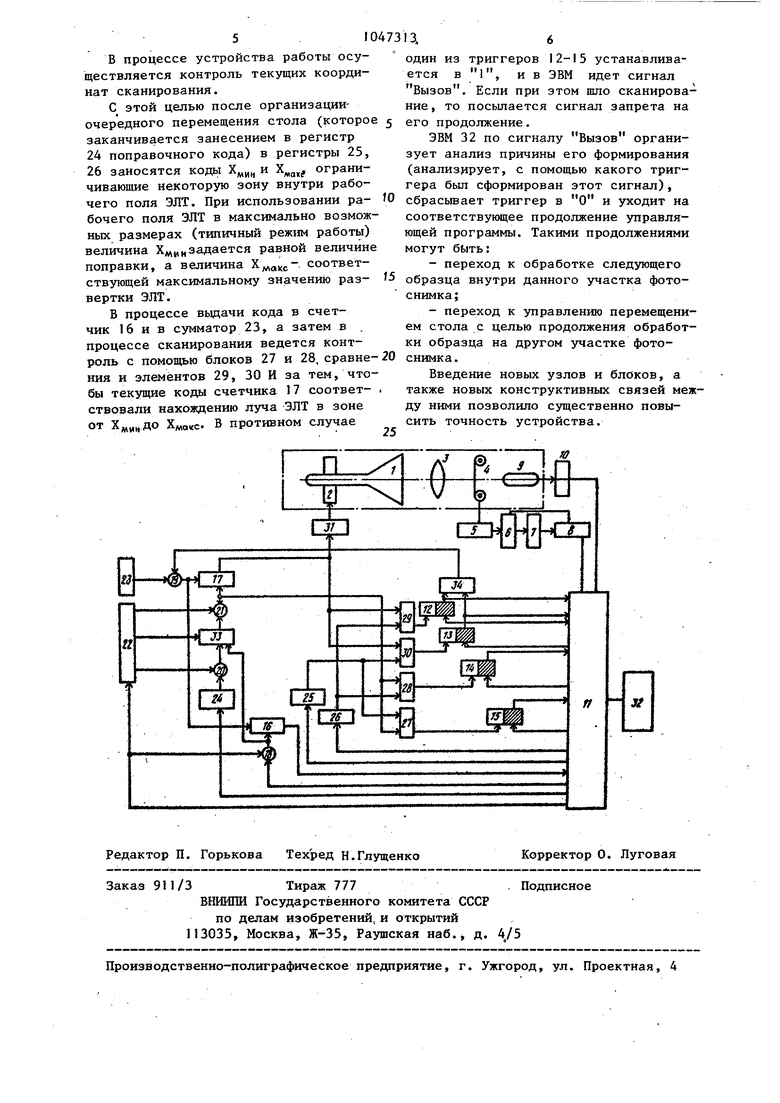
11 Изобретение относится к области автоматики и вычислительной техники в частности, к сканирующим автомата по обработке фотоснимков, получаемы с разлк ных трековых камер в экспер ментальной физике высоких энергий, аэрокосмических исследованиях, меди цине, авиации и др. Известны устройства для считыван информации с фотоснимков. Первое из известных устройств со держит блок сканирования, оптически связанный с носителем информации и единенный с блоками управления и из мерения координат, блок синхронизации, подключенный к блоку сканирова ния, логическому блоку и к блоку ин дикации. I Недостаток этого устройства состо ит в его невысокой точности. Известно и другое устройство, содержащее электронно-лучевую трубку, оптически связанную через фокусирующий элемент и носитель информации с фотоэлектрическим преобразователем, вычислительный блок, соединенный с блоком сопряжения, подключенным к элементу задержки, к элементам И,к регистрам и к триггерам, счетчики, соединенные с элементами И и с блоком сопряжения, генератор тактовых импульсов, подкл оченный к элементу И цифроаналогоБый преобразователь, соединенный с одним счетчиком и с отклоняющей системой ЭЛТ, привод носителя информации, подключенный к формирователям сигналов перемещения. Последнее из перечисленных вьше технических решений наиболее близко к описьшаемому устройству. Его недостаток также состоит в недостаточно высокой точности. Цель изобретения состоит в повыше нии точности устройства. Достигается она тем, что в известное устройство содержащее видеоусилитель, подключен ный к одному входу блока сопряжения другие входы которого соединены с ре версивным счетчиком, с выходами триг ,I еров первой и второй групп и с первым счетчиком, а выходы подключены к входам первого элемента И, элемента задержки, регистров и триггеров первой и второй групп, второй элемент И один вход которого соединен с генератором тактовых импульсов, а вход подключен к второму счетчику, соединенному с цифроаналоговьм преобразо,32вателем, вычислительный блок, подключенный к блоку сопряжения, и последовательно оптически связанные электронно-лучевую трубку, отклоняющая система которой соединена с выходом цифроаналогового преобразователя, фокусирующий элемент, носитель информации, привод которого подключен к формирователям сигналов перемещения, и фотоэлектрический преобразователь, вход которого соединен с видеоусилителем, введены третий элемент И, входы которого соединены с первьп регистром и с элементом задержки, первый блок сравнения, подключенный к второму регистру и к соответствующему триггеру второй группы, «торой блок сравнения, соединенный с третьим регистром и с соответствующим триггером второй группы, четвертый элемент И, вход которого подключен к элементу задержки, а вход соединен с вторым счетчиком и с блоками сравнения, сумматор, входы которого соединены с первым элементом И, выход которого подключен к одному входу первого счетчика, другой вход которого подключен к вьсходу второго элемента И, с третьим элементом И и с элементом задержки, а выход подключен к выходу четвертого элемента И, группу элементов И, одни входы которых подключены к выходу второго счетчика , другие соединены с выходами второго и третьего регистров соответственно , а выходы подключены к входам соответствующих триггеров первой группы, детектор, соединенный с формирователями сигналов перемещения и с одним входом реверсивного счетчика, другой вход которого подключен к формирователям сигналов перемещения, и элемент ИЛИ, входы которого соединены с вьЕкодами триггеров первой группь, а вход подключен к другому входу второго элемента И. I На чертеже представлена блок-схема устройства, Устройство содержит электронно-лучевую трубку 1 с отклоняющей системой 2, фокусирующий элемент 3, выполненный в виде объектива, носитель 4 информации с приводом 5, формирователем 6 сигналов перемещения, детектор 7 направлений перемещения, реверсивный счетчик 8, фотоэлектрический преобразователь 9, например ФЭУ, видеоусили310тель 10, блок 11 сопряжения, первую 12, 13 и вторую 1А, 15 группы триггеров, первый 16 и второй 17 счетчики, первый 18,второй 19, третий 20 и четвертый 21 элементы И, элемент 22 задержки, генератор 23 тактовых импульсов, первый 24, второй 25 и третий 26 регистры, первый 27 и второй 28 блоки сравнения. группу элементов 29, 30 И, цифроаналоговый преобразователь (ЦАП) 31, вычислительный блок 32, Hanpimep ЭВМ, сумматор 33 и элемент ИЛИ 34. Устройство работает следующим образом. Принцип функционирования устройства основан на использовании метода бегущего луча, при котором измеряемый фотоснимок просвечивается световым пятном трубки, а стоящий за фотоснимком ФЭУ регистрирует моменты пере сечения светового пятна с различными почернениями на фотоснимке. Вычислительный блок 32 позволяет задать для каж:дой строки ее положение, длину и направление сканирования; при этом с помощью видеоусилителя 10 имеется воз можность перед сканированием каждой строки управлять уровнем дискриминации сигналов с выхода ФЭУ, изменять . характеристики полосовьк фильтров по обработке требуемого фотоснимка.Средства диалога оператора (на чертеже не показаны) включают дисплей-монитор, функциональную клавиатуру и другие устройства, используемые оператором в процессе управления работой автомата и оказании помощи ЭВМ в за- труднительных ситуациях при обработке фотоснимков. Измерительный стол (на чёртеже не показан) позволяет с помощью моторов перемещать в двух взаимно ортогональных направлениях закрепленный на нем обрабатьшаемый фотосни- мок. Датчики сигналов привода (на чертеже не показаны) при перемещении сто ла с помощью формирователей 6 импульсов подают сигналы в детектор 7, осуществляющий управление реверсом счетчика 8. Перед началом работы измерительный стол устанавливается в крайнее (нулевое) положение, и ЭВМ обнуляет счетчик. В процессе работы при выполнении приказа о перемещении стола ЭВМ 32 осуществляет в циклическом режиме , 134 считьшание кода со счетчика 8 и его анализ. После того как стол переместится на величину, достаточно близкую к заданной (но не превьппающую ее), даётся приказ об остановке перемещения |стола. После остановки стола ЭВМ 32 может вычислить ошибку между заданным расчетным значением положения стола (которое он должен был полу- чить в результате перемещения с заданием осуществить точную стыковку соседних измеряемых участков фотоснимка) и его действительньм положением после перемещения. Эта ошибка и явотается той поправкой, которую в дальнейшем необходимо вносить при задании начального кода координат вдоль оси X для каждой строки сканирования. Решение задачи коррекции начала координат осуществляется с помощью счетчика 16 для всего поля измерений, определяемого рабочим полем ЭЛТ I и величиной перемещения измерительного стола. Разработчик управляющих сканированием программ оперирует с кодами координат, являющимися содержимым счетчика 16. Осуществив управление перемещением стола вдоль оси X, ЭВМ 32 получает информацию о кодах координат его действительного положе ия и вычисляет упомянутую вьш1е ошибку. . Для того, чтобы сканирование нового участка фотоснимка стыковалось с результатами сканирования предьщу- щего участка с максимально возможной точностью, необходимо при.заданий начального кода координаты каждой строки (который заносится.в счетчик 16 для всего поля измерений) вычитать из него код координаты действительно™ го положения стола и прибавлять к нему вычисленную поправку, которая учитывает ошибку между расчетным (требуемым) и действительным положением стола после перемещения. Полученный таким образом скорректированный код используется для физического управления началом очередной строки сканирования путем занесения его в счетчик 17 управления разверткой ЭЛТ. Перечисленные функции выполняются с помощью сумматора 33, элемента 22 задержки, регистра 24 и элементов 20, 21 И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода информации | 1988 |
|
SU1536368A1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Устройство для считывания и отображения видеоинформации | 1988 |
|
SU1817116A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |
| Устройство для считывания изображений | 1987 |
|
SU1481816A2 |
| Устройство для считывания графической информации | 1988 |
|
SU1522257A1 |
| Устройство для считывания графической информации | 1986 |
|
SU1377882A1 |
| Устройство для считывания изображений | 1985 |
|
SU1251135A1 |
| Измеритель координат элементов объектов | 1990 |
|
SU1744446A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1164752A1 |
УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИНФОРМАЦИИ С ФОТОСНИМКОВ, содержащее видеоусилитель, подключенный к одному входу блока сопряжения, другие входы которого соединены с реверсивным счетчиком, с выходами триггеров первой и второй групп и с первым счетчиком, а выходы подключены к входам первого элемента И, элемента задержки, регистров и триггеров первой и второй групп, второй элемент И, один вход которого соединен с генератором тактовых импульсов, а выход подключен ко второму счетчику, соединенному с цифроаналоговю преобразователем, вычислительный блок, подключенный к блоку сопряжения, и последовательно оптически связанные электронно-лучевую трубку, отклоняющая система которой соединена с выходом цифроаналоговогр преобразователя, фокусирующий элемент, носитель информации, привод которого подключен к формирователям сигналов перемещения, и фотоэлектрический преобразователь, выход которого соединен с видеоусилителем, отличающееся тем, что, с цепью повьапения его точности, оно содержит третий элемент И; входы которого соединены с первым регистром и с элементом задержки, первый блок сравнения, подключенный к второму регистру и к соответствующему триггеру второй группы, второй блок сравнения, соединенный с третьим регистром и с соответствукщим триггером второй группы, четвертый элемент И, вход которого подключен к элементу задержки, а выход соединен с вторьая счетчиком и с блоками сравнения, сумматор, входы которого соединены с первьо4 элементом И, вход которого подключен к одному входу первого счетчика, другой вход которого подключен к выходу второго элемента И, с третьим элементом И и с элементом задержки, а выход подключен к входу четвертого элемента И, группу элементов И, одни входы 4 которых подктаочены к входу второго счетчика, другие соединены с выхода00 ми второго и третьего регистров соответственно, а выходы подключены к 00 входам соответствующих триггеров первой группы, детектор, соединенный с формирователями сигналов перемещения и с одним входом реверсивного счетчика, другой вход которого подключен к формирователям cи нaлoм перемещения, и элемент ИЛИ, входы которого соедийены с выходами триггеров первой группы, а выход подключен к другому выходу второго элемента И.
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
