11048256 2
Изобретение относится к техническойдатчиков внешних метеоусловий и соецифизике и может быть использовано в сие- ненный с ним дополнительный коммутатор темах отопления, вентиляции и кондиционирования воздуха производственных зца.ний в системах обеспечения микроклимата отдельных административных зданий i крытых стадионов и дворцов спорта, и торговых залов, а также комплексов указанных объектов. Известна система управления микроклиматом, содержащая датчики микроклимата, датчики параметров, характеризующих формирование микроклимата, датчики внешних метеоусловий, связанные через коммутирующие устройства и аналого-цифровой преобразователь с процессором управляквдей вычислительной машины, генерирующей сигналы, поступающие через коммутаторы и цифроаналоговые преобразователи на исполнительные устройства ij . Недостатком этой системы является большое время самообучения, так как период повторяемости внешних метеоусло вий большой (годы). Цель изобретения сокращение времени самообучения системы. Поставленная цель достигается тем, что система управления микроклиматом. содержащая датчики микрокгамата, датчики параметров.характеризующих формиро вание микроклимата, датчики внешних метеоусловий, связанные черед соответствующие коммутирующие устройства и аналого-цифровой преобразователь с процессором управляющей вычислительной машины, генерирующей сигналы, поступакшие через коммутаторы и агафроанало- говые преобразователи на исполнительные устройства, допонительносодержит имитато датчиков внешних метеоусловий и соединенный с ним дополнительный коммутатор7 . включенный в линию связи датчиком внеш них метеоусловий с соответствующим ком мутйрующим устройством, На чертеже показана (Л нкцкональвая схема системы управления микроклима- . том. Система содержит датчики 1 микроклимата, датчики 2 параметров, характеризухяиих формирование микроклимату датчики 3 внешних метеоусловий, групповой преобразователь 4, модуль 5 кодового управления« бесконтактный коммута тор 6, аналогонии4 овой преобразователь 7, процессор 8 управляющей вычислитель ной машины, коммутаторы 9, цифроаналоговые преобрааователи 1О, имитатор 11 .12, модули 13 внутрисистемной связи, согласоватепи 14-16 ввода - вывода, устройства 17 цифрового вывода, релейные коммутаторы 18, оперативное запоминающее устройство 19, устройство 2О внешней памяти на магнитных дисках. алфавитно-цифровой видеотерминал 21, модуль 22 быстрой передачи данных, устройство 23 памяти на кассетной магнивдой ленте, устройство 24 последовательной широкой печати. Система работает следующим образом. Процесс управления расчленен на циклы равной продолжительности. В .начале каждого цикла производится последовательный опрос датчиков. С процессора 8 через согласователь 14 ввода - вывода на бесконтактный коммутатор 6 и на модуль 5 кодового управления подается управляющий сигнал на один из групповых преобразователей 4. Аналоговый сигнал от опрашиваемого датчика через групповой преобразователь 4 и бесконтактный коммутатор 6 поступает на модуль аналого-цифрового преобразователя 7. Там он преобразуется в двоичный код и через согласователь 14 ввода - вывода посту- пает в процессор 8. Время, затрачиваемое на преобразование, и ввод измеритель,о И14ормации в запоминакидее у стройство 19, значительно меньше колебаний в управляемом процессе. Поэто- У измерительная информация одного цикла вводится практически одновременно. После того, как вся измерительная информация передана в запоминающее устройство 19, в течение некоторого вре- . мени процессор 8 производит обработку поступивших данны и расчет необходимых управлякащих сигналов. Затем двоичный . код каждого управляющего сигнала через согласователь 15 ввода - вывода, модуfte 13 внутрисистемной связи и коммутаторы 9 поступает на модуль цифроаиало- преобразователя 1О, где он преобразуется в аналоговый сигнал, или через ycт ройство 17 цифрового выводана релейный ком. муратор18. Аналоговый управляющий сигнал вырабатывает на исполнительном устройстае величину управляющего воздействия, которая сохраняется неизменной на протяжении данного цикда управления. Затем офаботанная и обобщенная измерительная информация о ходе процесса и состоянии технологического оборудования передается процессором 8 через сог- пасоватепь 16 ввода - вывода на устройство 23 памяти на кассетной магнитной пейте и на устройство 24 печати и через модуль 22 быстрой передачи данных на. в,идеотермйнап 21. После чего система переходит в состояние ожиданиЯ| либо переходит к выполнению вспомогательных расчетоВ| которые могут прерываться без крушения программы и промежуточных результатов на время очередного цикла управления, . В начапьнь1й период эксплуатации системы, время между циклами управления используется для самообучения системы, которое осуществляется следующим образом. В оперативное запоминающее устройство 16 вводится математическая модель формирования микроклимата. На период между циклами управления процессор 8 через согласоватепь 14 ввода - вывода подает сигнал на коммутат 12, котррый на вход группового преобразователя 4 подсоединяет вместо датчиков 3 внешних метеоусловий имитатор 11 датчиков внешних метеоусловий. Работа системы во-время обучения происходит так же, как и во время управления, с той лишь разницей, что входную информацию система получает от имитатора 11 датчиков внешних метеоусловий, а вьтходную передает программе, моделирующей формирование микроклимата. После того, как на очередной модели формирования микроклимата обучение за-, канчивается, а оперативное запоминающее I устройство 19 вводится более сложная , модель формирования микроклимата и сис|тема, используя накопленный опыт, обуча ;ется на этой модели. После тмо, как Ьистема начинает достаточно быстро переходить от одной математической модели формирования микроклимата к другой, процесс обучения на моделях заканчивается и система переводится в режим обучения на реальном объекте. Время обуче{5ИЯ сокращается за счет того, что в пе обучения на моделях частота циклов управления увеличивается на два порядка.

| название | год | авторы | номер документа |
|---|---|---|---|
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| Тренажер для подготовки боевых расчетов станции обнаружения целей | 2022 |
|
RU2783557C1 |
| Учебный класс радиосвязи и телеграфной азбуки | 2020 |
|
RU2763923C2 |
| УЧЕБНО-ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ПОДГОТОВКИ СПЕЦИАЛИСТОВ В ОБЛАСТИ СРЕДСТВ И СИСТЕМ АВТОМАТИЗАЦИИ НЕПРЕРЫВНЫХ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2011 |
|
RU2459228C1 |
| Тренажер для подготовки операторов ПТРК с комбинированной системой наведения | 2018 |
|
RU2692024C1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1989 |
|
SU1688451A2 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
| Тренажер для отработки навыков взаимодействия операторов средств ближнего боя | 2015 |
|
RU2671460C1 |
СИСТЕМА УПРАВЛЕНИЯ МИКРОКЛИЛ1АТОМ, соаержеаиая датчики мшфокаимата, датчики . параметров, х рактеризуюших формирование ми окпий та; датчики внешних метеоусловий, связана, ные через соответствукадие коммутирую- . щие устройства и анапого-вдфровой преобразователь с процессором управпякшей вычислительной машины, генерирующей с.игналы, поступающие через коммутаторы и «ифроанапоговые преобразоватепи на испопнитепьные устройства, о т л и ч а к щ а я с я тем, что, с цепью сок|ращения времени самообучения системы, она содержит имитатор датчиков внешних метеоусловий и соединенный с ним цопопнитепьный коммутатор, включенный в ли1Шю связи датчиком внешних метеоусповнй с соответствующим коммутирующим ycTpofiii-; ством. -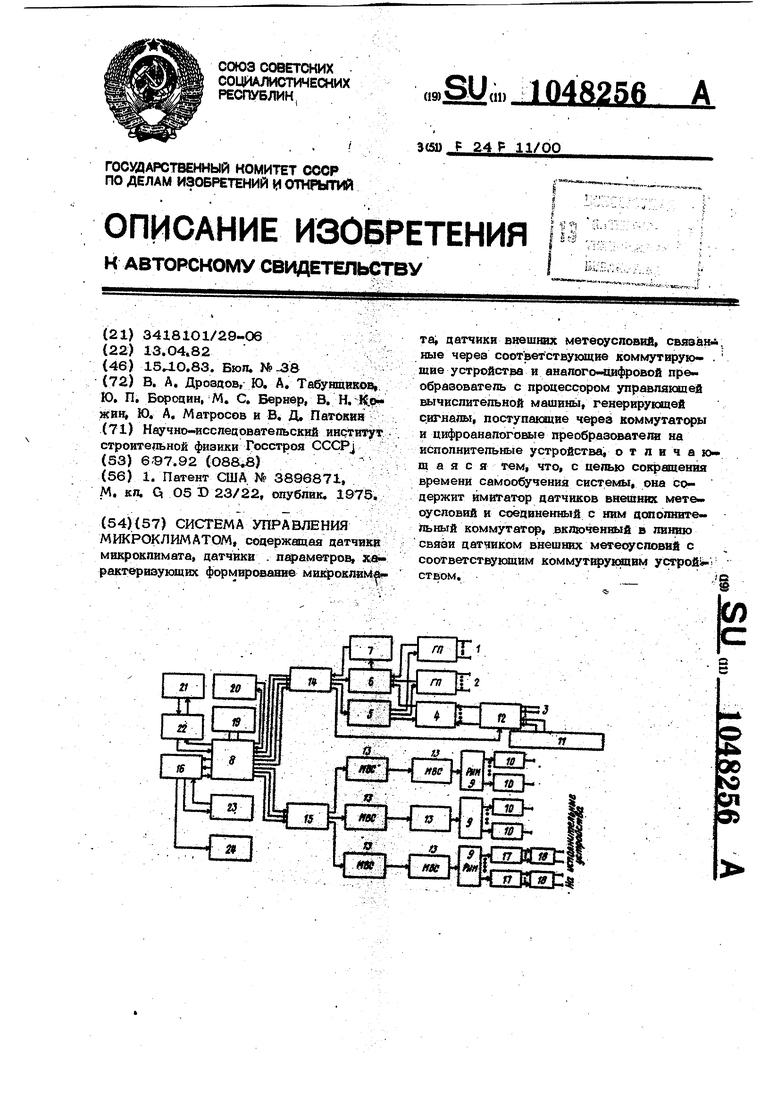
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США NP 3896871, М | |||
| кп | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
