Изобретение относится к электрическим приводам и предназначено для использования в высокодинамичных широкорегулируемых возвратно-поступательных механизмах с вертикальным перемещением исполнительных органов, например, в механизмах укладки проволоки намоточных аппаратов, в дозирующих устройствах.
Цель изобретения - получение высоких динамических характеристик в точках реверса с широким диапазоном регулирования скорости при вертикальном перемещении.
На фиг. 1, 2 показано схематическое изображение линейного электродвигателя
постоянного тока: вид сверху (фиг. 1) и вид спереди (фиг. 2); на фиг. 3 - схема коммутации двухслойной якорной обмотки линейного двигателя и схема параллельного соединения обмоток (фиг. 4); на фиг. 5, 6 показан датчик коммутации якорных обмоток: вид сверху (фиг. 5), и разрез А-А на фиг, 6; на фиг. 7 - функциональная схема электропривода; на фиг. 8, 9 - линейный двигатель (вид спереди) при реверсах полюсного бруска в нижнем положении (фиг. 8) и в верхнем положении (фиг. 9).
Вертикальный линейный электродвигатель постоянного тока заявляемого электропривода схематически представлен на фиг. 1 и состоит из С-образного неподвижного
00
ю
О)
о
Ч)
ел
магнитопровода 1 с системой возбуждения из постоянных магнитов 2 с концентраторами магнитного поля 3, на которых размещены зубцовые зоны А, обращенные друг к другу, в которых уложены двухслойные секции якорных обмоток 5 и 5. Между полюсными зонами с зазором 6 расположен подвижный ферромагнитный брусок 6, закрепленный на своих направляющих 7 с возможностью вертикального перемещения, нижняя плоскость бруска прикреплена к спиральной пружине 8, которая уравновешивает вес на середине высоты зубцовых зон (фиг. 2). При этом Р Fnp. где Р - масса бруска РПр - усилие пружины в среднем положении. Точка СР - точка статического равновесия.
На внутренней стороне С-образного ярма 1 неподвижного магнитопровода расположен совмещенный датчик положения и скорости (например, Индуктосин, линейный фотоимпульсный датчик и др.) с линейкой 9 и следящей головкой 10 жестко закрепленной к бруску 6. Между полюсом и следящей головкой неподвижно закреплен С-образный датчик положения 11 обмоток якоря с фотоэлементами, между которыми в зазоре размещен вторичный подвижный элемент датчика 12, жестко прикрепленный к полюсному бруску 6.
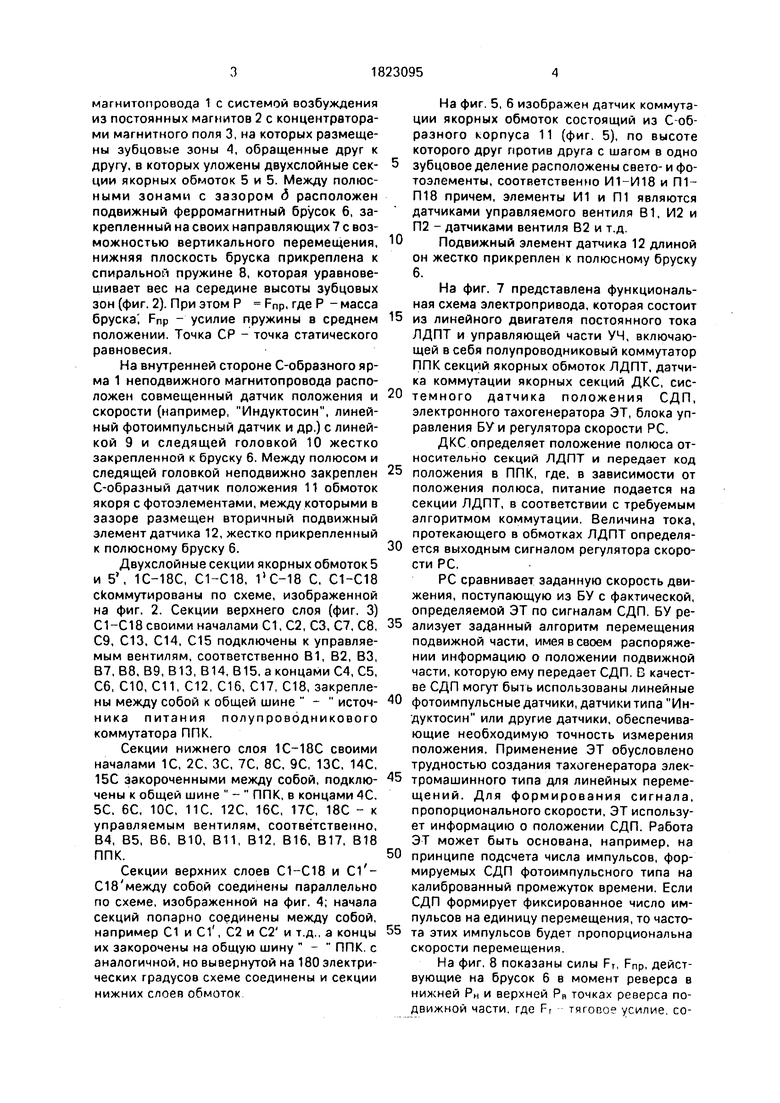
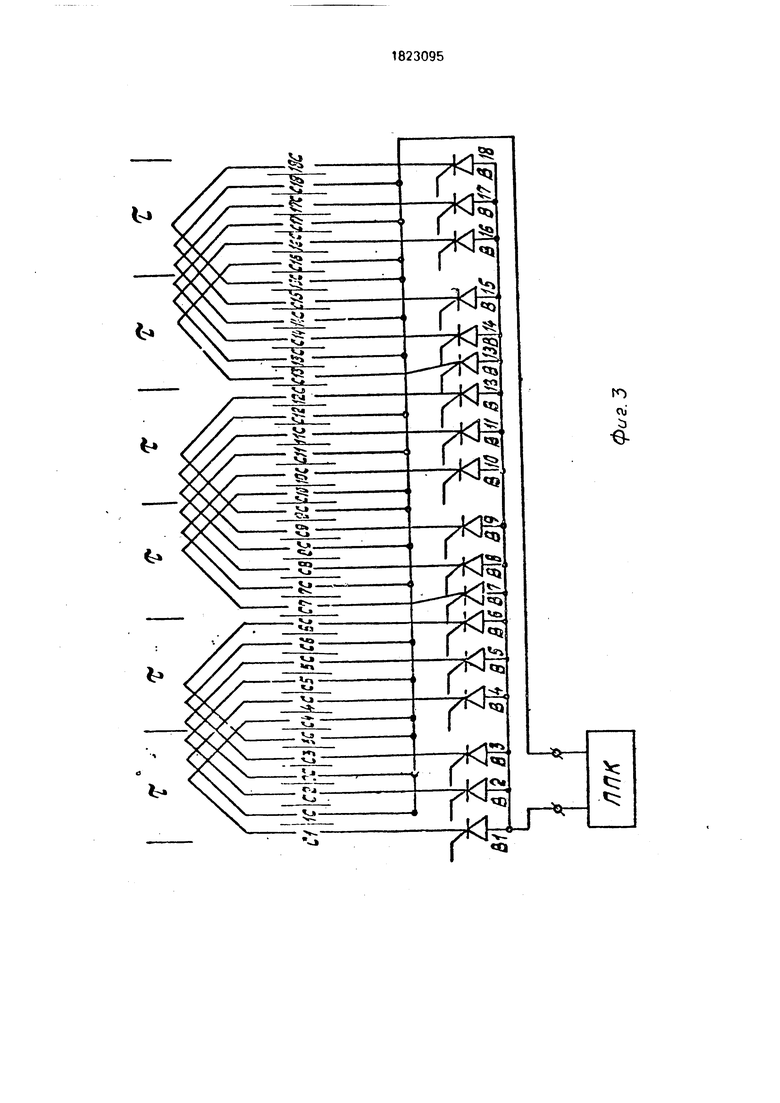
Двухслойные секции якорных обмоток 5 и 5, 1С-18С, С1-С18, 1 С-18 С, С1-С18 скоммутированы по схеме, изображенной на фиг. 2. Секции верхнего слоя (фиг. 3) С1-С18 своими началами С1, С2, СЗ, С7, С8, С9, С13, С14, С15 подключены к управляемым вентилям, соответственно В1, В2, ВЗ, В7, В8, В9, В13, В14, В15, а концами С4, С5, С6, СЮ, С11, С12, С16, С17, С18, закреплены между собой к общей шине - источ- ника питания полупроводникового коммутатора ППК.
Секции нижнего слоя 1С-18С своими началами 1C, 2С, ЗС, 7С, 8С, 9С, 13С. 14С, 15С закороченными между собой, подключены к общей шине - ППК, в концами 4С, 5С. 6С. ЮС, 11С. 12С, 16С, 17С, 18С - к управляемым вентилям, соответственно, В4, В5, В6, ВЮ, В11, В12, В16, В17, В18 ППК.
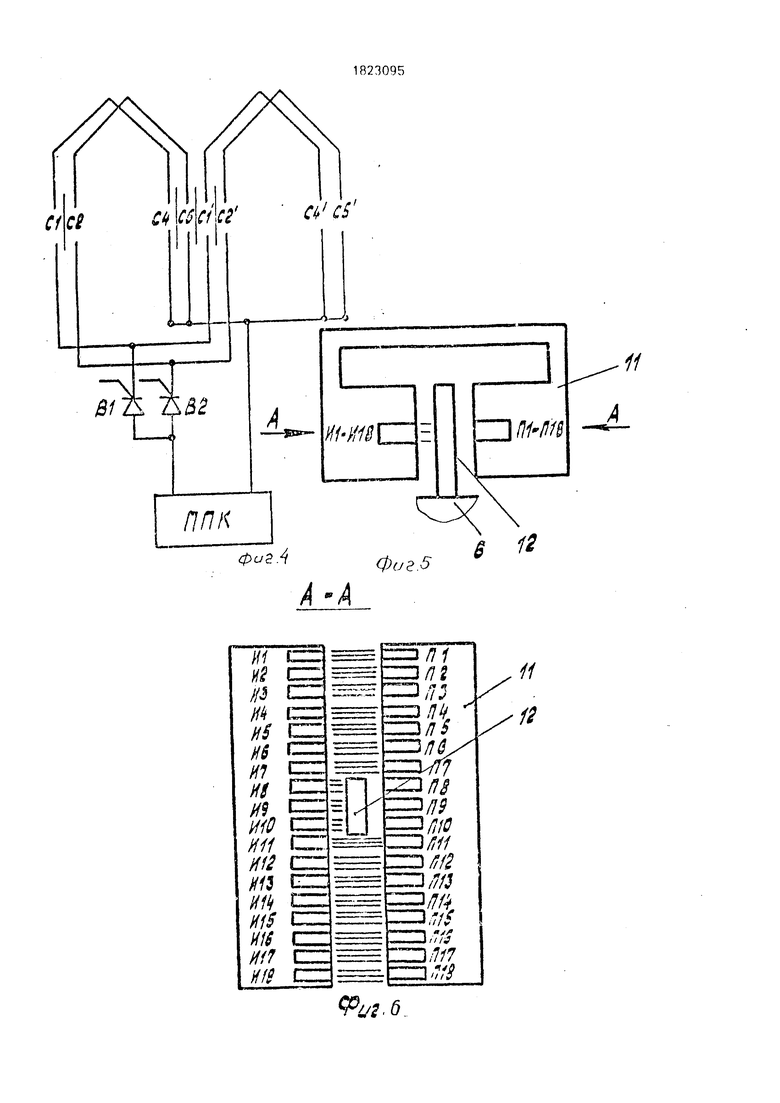
Секции верхних слоев С1-С18 и С1 - С18 между собой соединены параллельно по схеме, изображенной на фиг. 4; начала секций попарно соединены между собой, например С1 и С11, С2 и С2 и т.д., а концы их закорочены на общую шину - ППК. с аналогичной, но вывернутой на 180 электрических градусов схеме соединены и секции нижних слоев обмоток
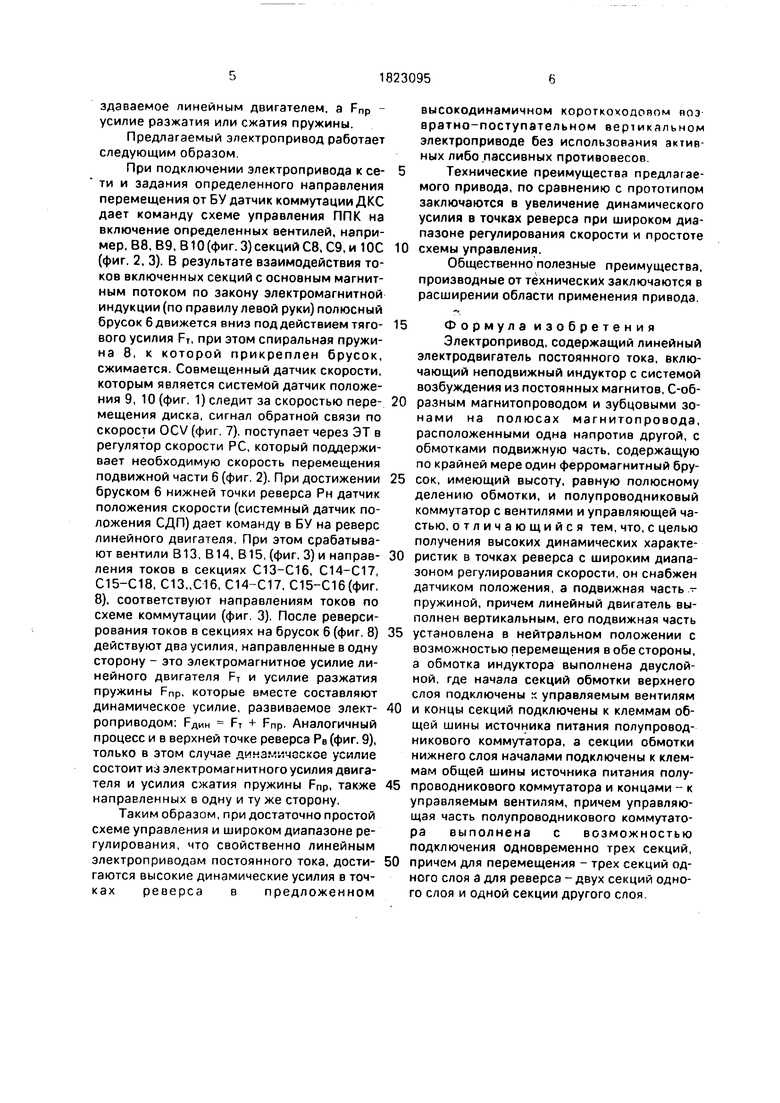
На фиг. 5, 6 изображен датчик коммутации якорных обмоток состоящий из С-образного корпуса 11 (фиг. 5), по высоте которого друг против друга с шагом в одно
зубцовое деление расположены свето- и фотоэлементы, соответственно И1-И18 и П1- П18 причем, элементы И1 и П1 являются датчиками управляемого вентиля В1, И2 и П2 - датчиками вентиля В2 и т.д.
0 Подвижный элемент датчика 12 длиной он жестко прикреплен к полюсному бруску 6.
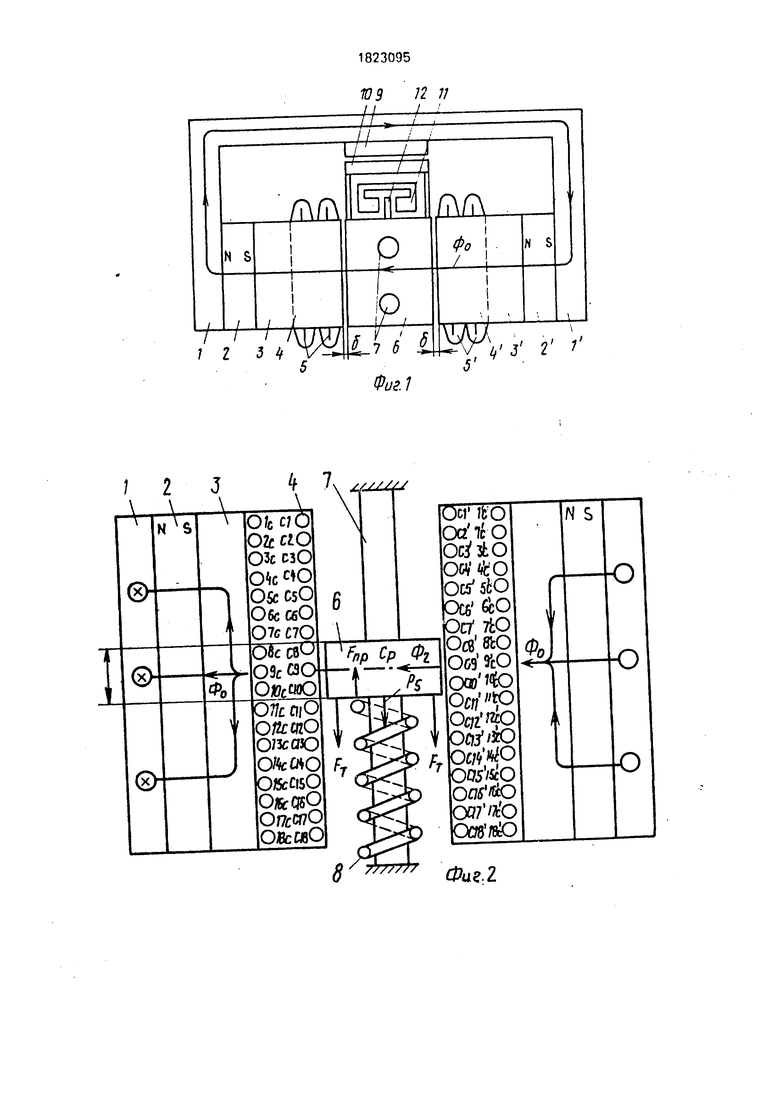
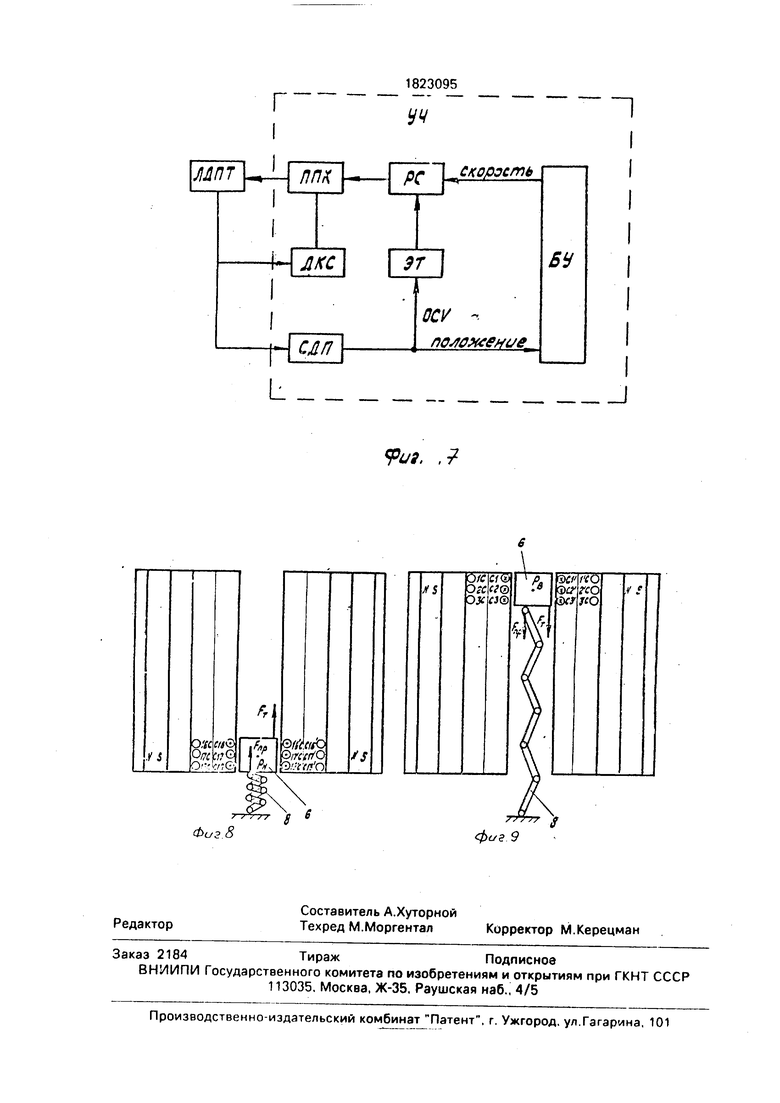
На фиг. 7 представлена функциональная схема электропривода, которая состоит
5 из линейного двигателя постоянного тока ЛДПТ и управляющей части УЧ, включающей в себя полупроводниковый коммутатор ППК секций якорных обмоток ЛДПТ, датчика коммутации якорных секций ДКС, сис0 темного датчика положения СДП, электронного тахогенератора ЭТ, блока управления БУ и регулятора скорости PC.
ДКС определяет положение полюса относительно секций ЛДПТ и передает код
5 положения в ППК, где, в зависимости от положения полюса, питание подается на секции ЛДПТ, в соответствии с требуемым алгоритмом коммутации. Величина тока, протекающего в обмотках ЛДПТ определя0 ется выходным сигналом регулятора скорости PC.
PC сравнивает заданную скорость движения, поступающую из БУ с фактической, определяемой ЭТ по сигналам СДП. БУ ре5 ализует заданный алгоритм перемещения подвижной части, имея в своем распоряжении информацию о положении подвижной части, которую ему передает СДП. D качестве СДП могут быть использованы линейные
0 фотоимпульсные датчики, датчики типа Ин- дуктосин или другие датчики, обеспечивающие необходимую точность измерения положения. Применение ЭТ обусловлено трудностью создания тахогенератора элек5 тромашинного типа для линейных перемещений. Для формирования сигнала, пропорционального скорости, ЭТ использует информацию о положении СДП. Работа ЭТ может быть основана, например, на
0 принципе подсчета числа импульсов, формируемых СДП фотоимпульсного типа на калиброванный промежуток времени. Если СДП формирует фиксированное число импульсов на единицу перемещения, то часто5 та этих импульсов будет пропорциональна скорости перемещения.
На фиг, 8 показаны силы FT, Fnp, действующие на брусок 6 в момент реверса в нижней РН и верхней Рв точках реверса подвижной части, где Fr тягосое усилие создаваемое линейным двигателем, а РПр - усилие разжатия или сжатия пружины.
Предлагаемый электропривод работает следующим образом.
При подключении электропривода к се- ти и задания определенного направления перемещения от БУ датчик коммутации ДКС дает команду схеме управления ППК на включение определенных вентилей, например, 88, В9, В10 (фиг. 3) секций С8, С9, и ЮС (фиг. 2, 3). В результате взаимодействия токов включенных секций с основным магнитным потоком по закону электромагнитной индукции (по правилу левой руки) полюсный брусок 6 движется вниз под действием тяго- вого усилия FT, при этом спиральная пружи- на 8, к которой прикреплен брусок, сжимается. Совмещенный датчик скорости, которым является системой датчик положения 9, 10 (фиг. 1) следит за скоростью пере- мещения диска, сигнал обратной связи по скорости OCV (фиг. 7). поступает через ЭТ в регулятор скорости PC, который поддерживает необходимую скорость перемещения подвижной части 6 (фиг. 2). При достижении бруском 6 нижней точки реверса Рн датчик положения скорости (системный датчик положения СДП) дает команду в БУ на реверс линейного двигателя. При этом срабатывают вентили В13, В14, В15, (фиг. 3) и направ- ления токов в секциях С13-С16, С14-С17, С15-С18, С13„С1б, С14-С17, С15-С16(фиг. 8), соответствуют направлениям токов по схеме коммутации (фиг. 3). После реверсирования токов в секциях на брусок 6 (фиг, 8) действуют два усилия, направленные в одну сторону - это электромагнитное усилие линейного двигателя FT и усилие разжатия пружины Fnp, которые вместе составляют динамическое усилие, развиваемое элект- роприводом: Рдин FT + Fnp. Аналогичный процесс и в верхней точке реверса Рв (фиг. 9), только в этом случае динамическое усилие состоит HJ электромагнитного усилия двигателя и усилия сжатия пружины Fnp, также направленных в одну и ту же сторону.
Таким образом, при достаточно простой схеме управления и широком диапазоне регулирования, что свойственно линейным электроприводам постоянного тока, дости- гаются высокие динамические усилия в точках реверса в предложенном
высокодинамичном короткоходовом ноэ вратно-поступательном вертикальном электроприводе без использования активных либо пассивных противовесов.
Технические преимущества предлагаемого привода, по сравнению с прототипом заключаются в увеличение динамического усилия в точках реверса при широком диапазоне регулирования скорости и простоте схемы управления.
Общественно полезные преимущества, производные от технических заключаются в расширении области применения привода.
Формула изобретения Электропривод, содержащий линейный электродвигатель постоянного тока, включающий неподвижный индуктор с системой возбуждения из постоянных магнитов, С-об- разным магнитопроводом и зубцовыми зонами на полюсах магнитопровода, расположенными одна напротив другой, с обмотками подвижную часть, содержащую по крайней мере один ферромагнитный брусок, имеющий высоту, равную полюсному делению обмотки, и полупроводниковый коммутатор с вентилями и управляющей частью, отличающийся тем, что, с целью получения высоких динамических характеристик в точках реверса с широким диапазоном регулирования скорости, он снабжен датчиком положения, а подвижная часть - пружиной, причем линейный двигатель выполнен вертикальным, его подвижная часть установлена в нейтральном положении с возможностью перемещения в обе стороны, а обмотка индуктора выполнена двуслойной, где начала секций обмотки верхнего слоя подключены управляемым вентилям и концы секций подключены к клеммам общей шины источника питания полупроводникового коммутатора, а секции обмотки нижнего слоя началами подключены к клеммам общей шины источника питания полупроводникового коммутатора и концами - к управляемым вентилям, причем управляющая часть полупроводникового коммутатора выполнена с возможностью подключения одновременно трех секций, причем для перемещения - трех секций одного слоя а для реверса - двух секций одного слоя и одной секции другого слоя.
ЮЗ П V
III 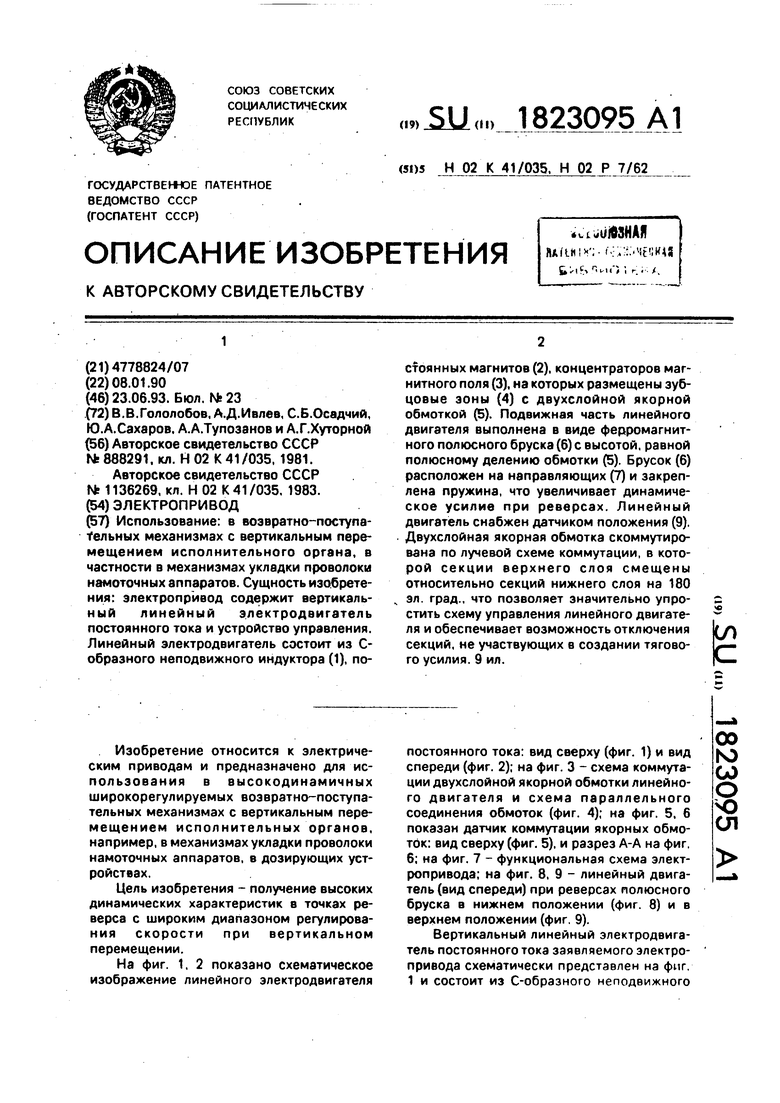
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный электрический двигатель постоянного тока "Подэлин | 1979 |
|
SU1001347A1 |
| Линейный двигатель постоянного тока | 1979 |
|
SU1023569A1 |
| Линейный двигатель постоянного тока | 1983 |
|
SU1136269A1 |
| Линейный электрический двигатель | 1978 |
|
SU792511A1 |
| Линейный электродвигатель "Бимарпол | 1978 |
|
SU942217A1 |
| Электрический двигатель | 1981 |
|
SU983928A1 |
| Стенд линейных ускорений | 1981 |
|
SU1027628A1 |
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
| Линейный электрический двигатель | 1986 |
|
SU1396214A1 |
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
Использование: в возвратно-поступательных механизмах с вертикальным перемещением исполнительного органа, в частности в механизмах укладки проволоки намоточных аппаратов. Сущность изобретения: электропривод содержит вертикальный линейный электродвигатель постоянного тока и устройство управления. Линейный электродвигатель состоит из С- образного неподвижного индуктора (1), постоянных магнитов (2), концентраторов магнитного поля (3), на которых размещены зуб- цовые зоны (4) с двухслойной якорной обмоткой (5). Подвижная часть линейного двигателя выполнена в виде ферромагнитного полюсного бруска (6) с высотой, равной полюсному делению обмотки (5). Брусок (6) расположен на направляющих (7) и закреплена пружина, что увеличивает динамическое усилие при реверсах. Линейный двигатель снабжен датчиком положения (9). Двухслойная якорная обмотка скоммутиро- вана по лучевой схеме коммутации, в которой секции верхнего слоя смещены относительно секций нижнего слоя на 180 эл. град., что позволяет значительно упростить схему управления линейного двигателя и обеспечивает возможность отключения секций, не участвующих в создании тягового усилия.9 ил. ё
7/////S
Фи.2
Г
«VJ v-. «Q
м-ш.
&US4фиг 5
Фм.б
Г
n
O: SC
o%
Фиг 8
1823095 У
1
скорость
6У
OCV - лы0же#(/е
I
PU9. ,
фаг 9
| Вертикальный линейный электромагнитный двигатель | 1978 |
|
SU888291A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный двигатель постоянного тока | 1983 |
|
SU1136269A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
