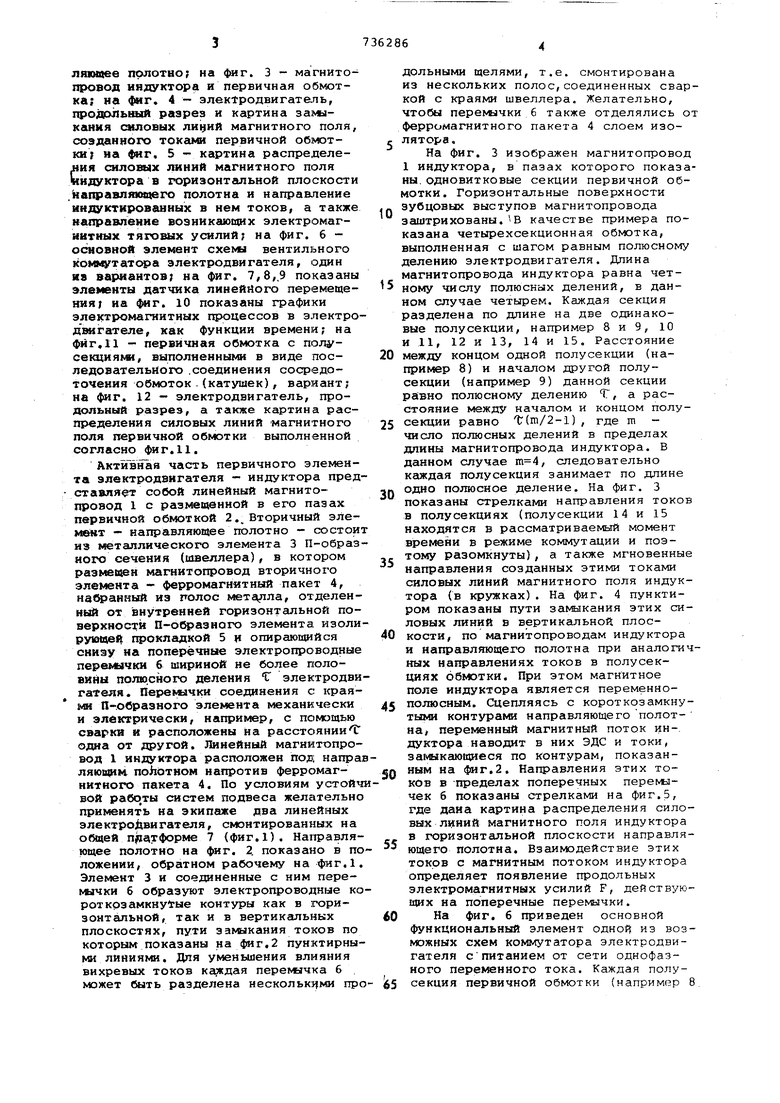
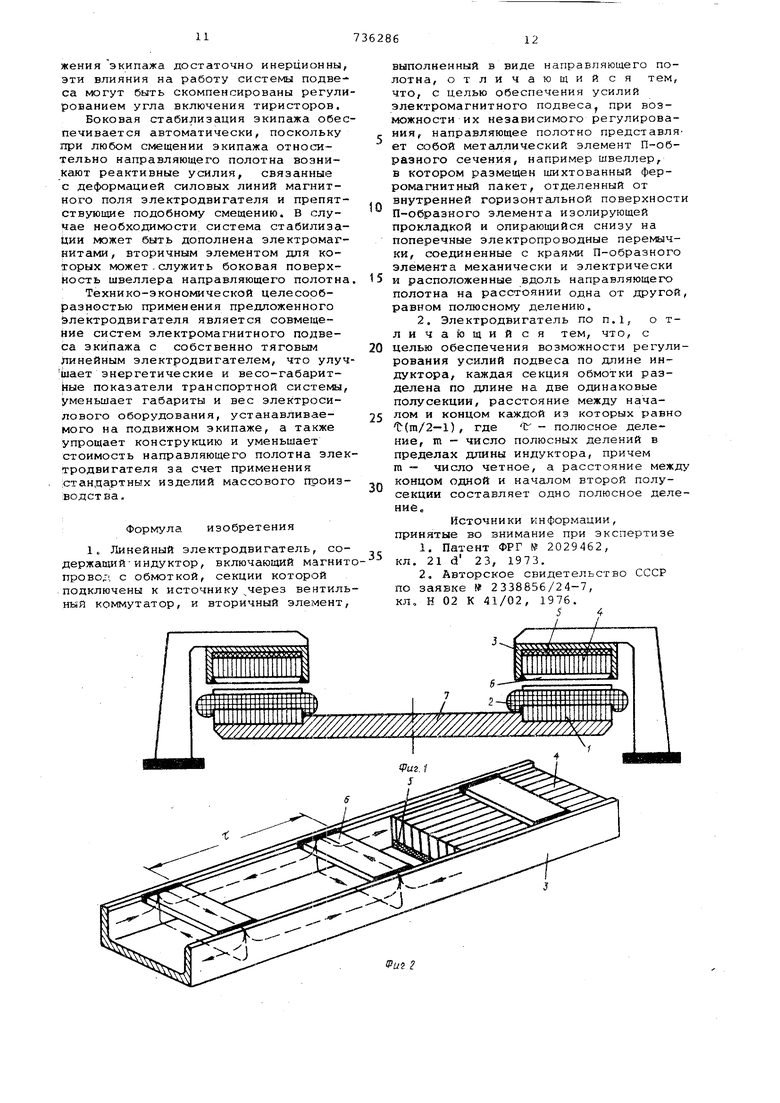
Изобретение относится к электодвигатёлям с линейным перемещением, например, для транспортных устройст Известен линейный электродвигател содержащий С-образный магнитопро.вод с размещенной на нем катушкой, подключенной к источнику питания че рез вентильный коммутатор, и вторич ный элемент в виде металлической полосы 1. Известен и другой линейный элект двигатель, содержащий индуктор, включающий магнитопровод с обмоткой, секции которой подключены к ис точнику через вентильный коммутатор и вторичный элемент, выполненный в виде направляющего полотна 2. Такой электродвигатель является наиРЮлее близким к предложенному по технической сущности. Однако при таких габаритах электродвигателя трудно получать величи ну вертикального усилия, обеспечивающую полный подвес экипажа. Целью изобретения является обеспечение усилий электромагнитного подвеса. Это достигается тем, что направляющее полотно представляет cofkDft металлический элемент П-образного сечения, например щвеллер, в котором размещен шихтованный ферромагнитный пакет, отделенный от внутренней горизонтальной поверхности П-образного элемента изолирующей прокладкой и опирающийся снизу на поперечные электропроводные перемк ки, соединенные с краями П-образно элемента механически и электрическ и расположенные вдоль направляюще г. полотна на расстоянии одна от другой, равном полюсному делению. Для обеспечения возможности регулирования усилий подвеса по длине индуктора каждая секция обмотки разделена по длине на две одинаковые полусекции, . расстояние между началом и концом каждой из которых равно f (m/2-l) , где t- полюсное деление, m - число полюсных делений в пределах длины индуктора, причем m - число четное, а расстояние между концом одной и началом второй полусекции составляет одно полюсное деление. На фиг. 1 схематически изображен предложенный электродвигатель, поперечный разрез; на фиг. 2 - направляющее полотно на фиг. 3 - магнитопровод иядуктор 1 и первичная обмотка; на фиг, 4 - электродвигатапь, продрлывлй разрез и картина замлкания (жловых ли1;ий магнитного поля, созданного тохгми первичной об1 ютки} на 4«г, 5 - картина распределения силовых линий магнитного поля «ндуктора в горизонтальной плоскости .Направляющего полотна и напраапение индуктированных в нем токов, а также направление возникающих электромагнвтных тяговых уснлнй; на фиг. 6 основной элемент cxei«i вентильного ко «4утатора электродвигателя, один й8 варнантов; на фиг. 7,8,.9 показаны эле «енты датчика лннейного перемещения; на г. 10 показаны графики электромагнитных процессов в электродвигателе, как функции времени; на фиг,11 - первичная обмотка с полусекцияки, выполненными в виде последовательного .соединения сосредоточения обмоток - (катушек), вариант; на фиг. 12 - электродвигатель, продольный разрез, а также картина распределения силовых линий магнитного поля первичной обмотки выполненной согласно фиг,11.
Актйвная часть первичного элемента злектродвнгателя - индуктора представляет собой линейный магнитопровод 1 с размещенной в его пазах первичной обмоткой 2,, Вторичный элемент - направляющее полотно - состои из металлического элемента 3 П-образного сечения (швеллера), в котором размеьон магнитопровод вторичного элемента - ферромагнитный пакет 4, на анный из полос металла, отделенный от внутренней горизонтальной поверхнос1 и П-образного элемента изолирую1ввй прокладкой 5 и опирающийся снизу на поперечные электропроводные перемычки 6 шириной не более половины полю.сного деления электродвигателя, Перекычки соединения с краями П-образного элемента механически и электрически, например, с помощью сварки и расположены на расстоянииf omts от другой. Линейный магнитопровод 1 индуктора расположен под напраЛЯЮ1ФК nohoTHOM напротив ферромагнитного пакета 4. По условиям устойчвой рабо,ты систем подвеса желательно применять на экипаже два электро внгателя, смонтированных на общей п гатформе 7 (фиг,1). Направляющее полотно на фиг. 2. показано в положении, обратном рабочему на фиг.1. Элемент 3 и соединенные с ним переьшчки 6 образуют электропроводные короткозамкну ые контуры как в горя зонтапьной, так и в вертикальных плоскостях, пути замыкания токов по которым показаны на фиг,2 пунктирными линиями. Для уменыления влияния вихревых токов каждая перекичка 6 может быть разделена нескольк)(ми продольными щелями, т.е. смонтирована из нескольких полос,соединенных сваркой с краями швеллера. Желательно, чтобы перемычки 6 также отделялись о ферромагнитного пакета 4 слоем изолятора.
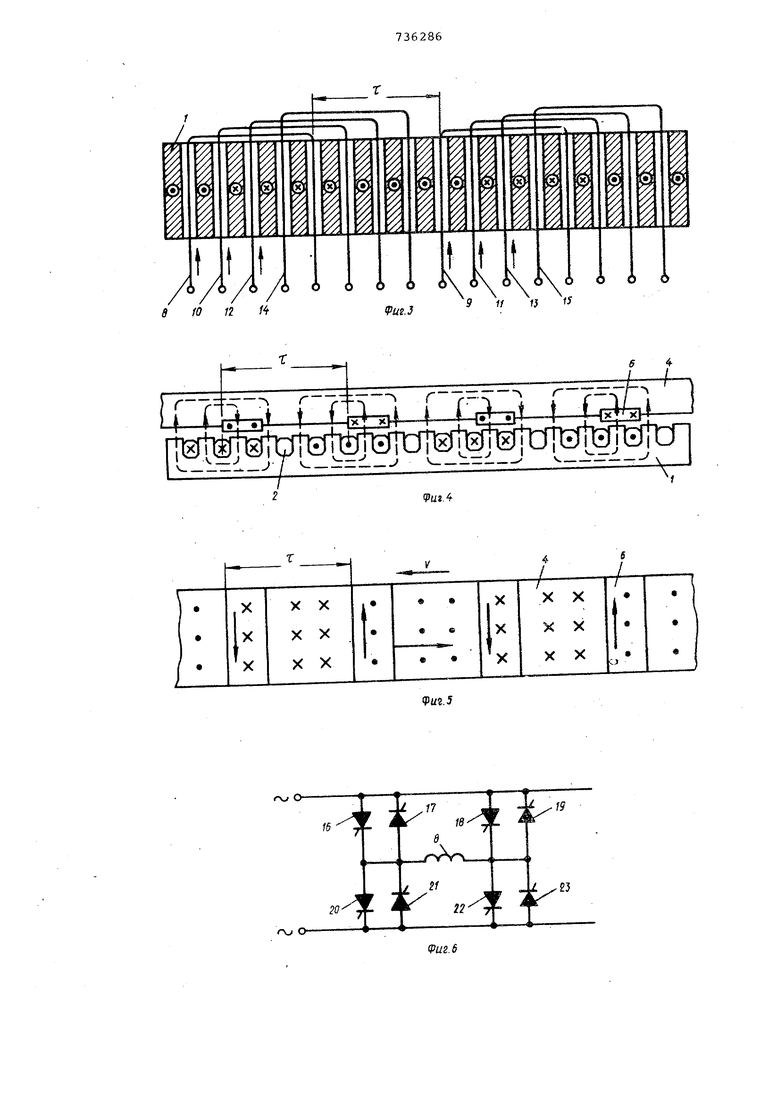
На фиг. 3 изображен магнитопровод 1 индуктора, в пазах которого показаны, одновитковые секции первичной обмотки. Горизонтальные поверхности зубцовых выступов магнитопровода заштрихованы.В качестве примера показана четырехсекционная обмотка, выполненная с шагом равным полюсному делению электродвигателя. Длина магннтопровода индуктора равна четному числу полюсных делений, в данном случае четырем. Каждая секция разделена по длине на две одинаковые полусекции, например 8 и 9, 10 и 11, 12 и 13, 14 и 15, Расстояние между концом одной полусекции (например 8) и началом другой полусекции (например 9) данной секции равно полюсному делению 1Г, а расстояние кюжду началом и концом полусекции равно t(m/2-l), где m число полюсных делений в пределах длины магнитопровода индуктора. В данном случае , следовательно каждая полусекция занимает по длине одно полюсное деление. На фиг. 3 показаны стрелками направления токов в полусекцнях (полусекции 14 и 15 находятся в рассматриваемЕлй момент времени в режиме коммутации и поэтому разомкнуты), а также мгновенные направления созданных этими токами силовых линий магнитного поля индуктора (в кружках). На фиг. 4 пунктиром показаны пути заг ыкания этих силовых линий в вертикальной плоскости, по магнитопроводам индуктора и направляющего полотна при аналогичных направлениях токов в полусекциях обмотки. При этом магнитное поле индуктора является переменнопoJШCным. Сцепляясь с короткозамкнутыми контурами направляющего полотна, переменный магнитный поток индуктора наводит в них ЭДС и токи, залмкающиеся по контурам, показанным на фиг.2. Направления этих токов в -пределах поперечных перемычек 6 показаны стрелками на фиг.5, где дана картина распределения силовых линий магнитного поля индуктора в горизонтальной плоскости направляющего полотна. Взаимодействие этих токов с магнитным потоком индуктора определяет появление продольных электромагнитных усилий F, действующих на поперечные nepeNui4KH.
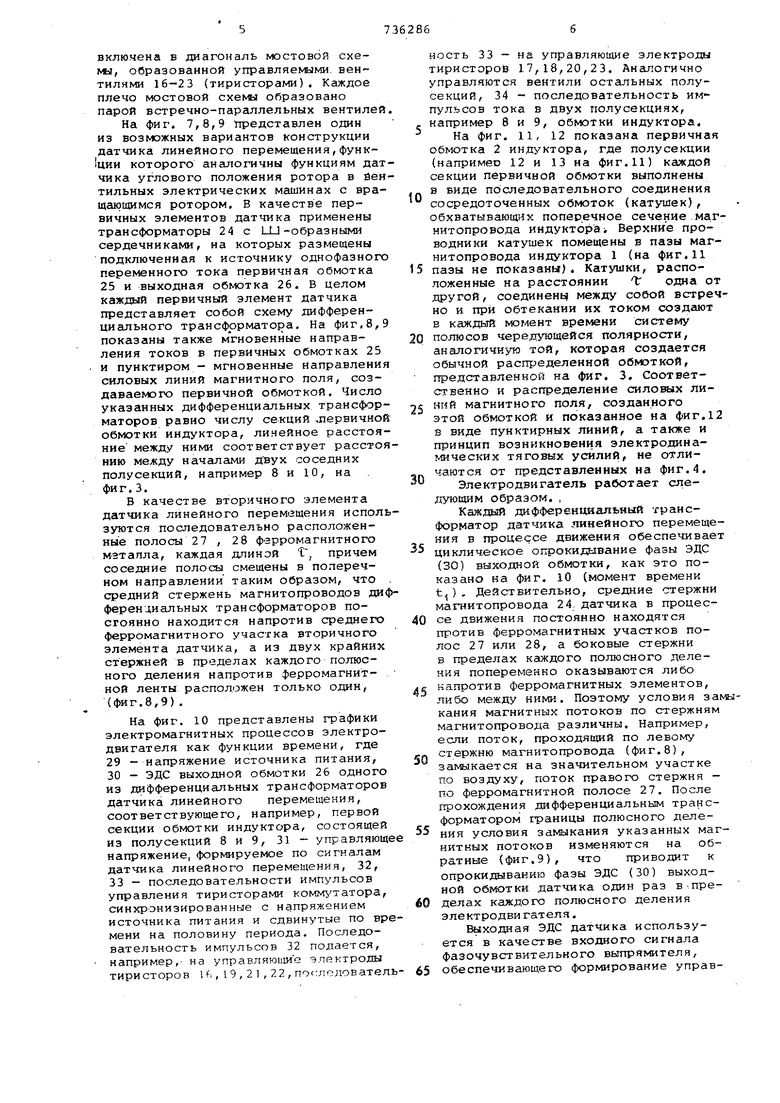
На фиг. 6 приведен основной функциональный элемент одной из возможных схем коммутатора электродвигателя спитанием от сети однофазного переменного тока. Каждая полусекция первичной обмотки (например 8
включена в диагональ мостовой схемы, образованной управляемыми, вентилями 16-23 (тиристорами). Каждое плечо мостовой схемы образовано парой встречно-параллельных вентилей
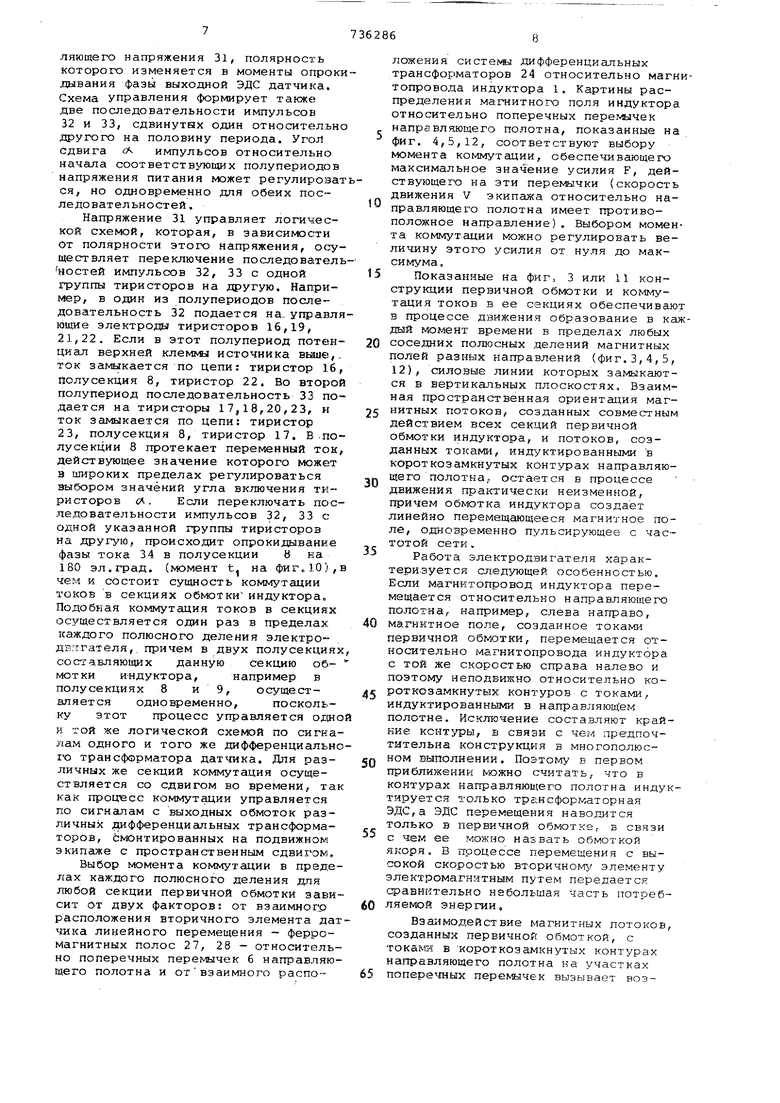
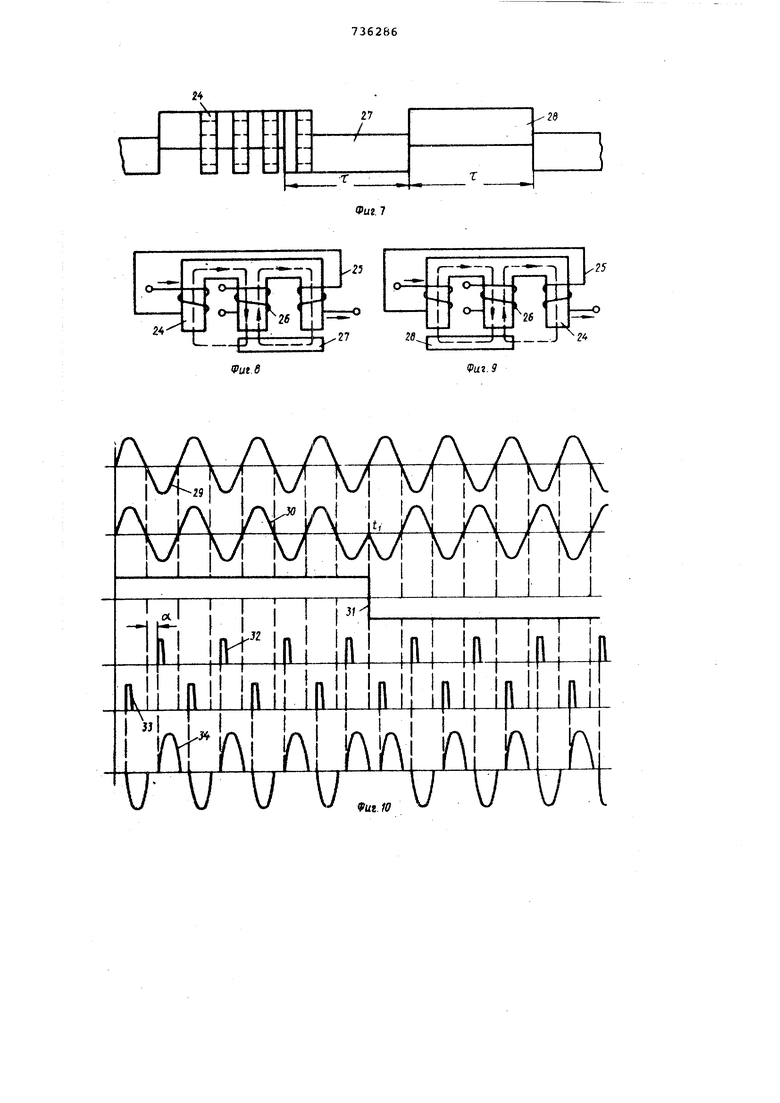
На фиг. 7,8,9 тредставлен один из возможных вариантов конструкции датчика линейного перемещения,функции которого ангшогичны функциям датчика углового положения ротора в йентильных электрических машинах с вращающимся ротором. В качестве первичных элементов датчика применены трансформаторы 24 с LL1-образными сердечниками, на которых размещены подключенная к источнику однофазного переменного тока первичная обмотка 25 и выходная обмотка 26. В целом каждый первичный элемент датчика представляет собой схему дифференциального трансформатора. На фиг,8,9 показаны также мгновенные направления токов в первичных обмотках 25 и пунктиром - мгновенные направления силовых линий магнитного поля, созяаваемото первичной обмоткой. Число указанных дифференциальных трансформаторов равно числу секций .первичной обмотки индуктора, линейное расстояние между ними соответствует расстоянию между начсшаили двух соседних полусекций, например 8 и 10, на фи г. 3.
В качестве вторичного элемента датчика линейного перемещения используются последовательно расположенные полосы 27 , 28 ферромагнитного металла, каждая длиной t, причем соседние полосы смещены в поперечном направлении таким образом, что . средний стержень магнитопроводов дифференциальных трансформаторов постоянно находится напротив среднего ферромагнитного участка вторичного элемента датчика, а из двух крайних стержней в пределах каждого полюсного деления напротив ферромагнитной ленты расположен только один, (фиг.8,9).
На фиг. 10 представлены графики электромагнитных процессов электродвигателя как функции времени, где
29- напряжение источника питания,
30- ЭДС выходной обмотки 26 одного из дифференцисшьных трансформаторов датчика линейного перемещения, соответствующего, например, первой секции обмотки индуктора, состоящей из полусекций 8 и 9, 31 - управляюще напряжение, формируемое по сигналам датчика линейного перемещения, 32,
33 - последовательности импульсов управления тиристорами комт татора, синхронизированные с напряжением источника питания и сдвинутые по времени на половину периода. Последовательность импульсов 32 подается, например,- на управляю1иие электроды тиристоров f., 19,21 , 22 , послеловательность 33 на управляющие электроды тиристоров 17,18,20,23. Аналогично управляются вентили остальных полусекций, 34 - последовательность импульсов тока в двух полусекциях, например 8 и 9, обмотки индуктора.
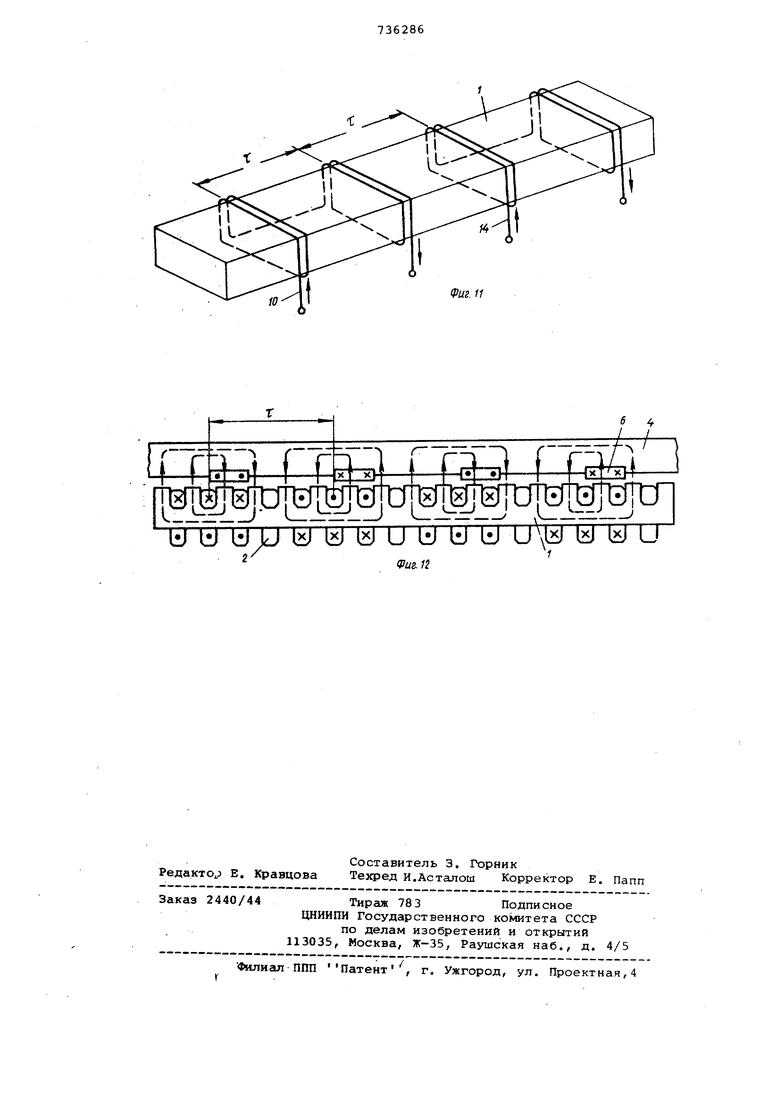
На фиг. 11, 12 показана первичная 2 индуктора, где полусекции (напримео 12 и 13 на фиг.И) каждой секции первичной обмотки выполнены в виде последовательного соединения
0 сосредоточенных обмоток (катушек), обхватывающих поперечное сечение ма.гнитопровода индуктораi Верхние проводники катушек помещены в пазы магнитопровода индуктора 1 (на фиг.11
5 пазы не показаны). Катушки, расположенные на расстоянии одна от другой, соединенц между собой встречно и при обтекании их током создают в каждый момент времени систему полюсов чередующейся полярности,
0 аналогичную той, которая создается обычной распределенной обмоткой, представленной на фиг. 3. Соответственно и распределение силовых линий магнитного поля, созданного
5 этой обмоткой и показанное на фиг.12 S виде пунктирных линий, а также и принцип возникновения электродинамических тяговых усилий, не отличаются от представленных на фиг.4.
0
Электродвигатель работает следующим образом.,
Каждый дифференциальный трансформатор датчика линейного перемещения в процессе движения обеспечивает
5 циклическое опрокидывание фазы ЭДС (30) выходной обмотки, как это показано ка фиг. 10 (момент времени t). Действительно, средние стержни магнитопровода 24, датчика в процес0се движения постоянно находятся против ферромагнитных участков полос 27 или 28, а боковые стержни в пределах каждого полюсного деления попеременно оказываются либо напротив ферромагнитных элементов,
5 либо между ними. Поэтому условия замыкания магнитных потоков по стержням магнитопровода различны. Например, если поток, проходящий по левому стержню магнитопровода (фиг.8), замыкается на значительном участке по воздуху, поток правозго стержня - по ферромагнитной полосе 27. После прохождения дифференциальным трансформатором границы полюсного деле5ния условия замыкания указанных магнитных потоков изменяются на обратные {фиг.9), что приводит к опрокидааванию фазы ЭДС (30) выходной обмотки датчика один раз в ,пре0дел ах каждого полюсного деления электродвигателя.
Выходная ЭДС датчика используется в качестве входного сигнала фазочувствительного выпрямителя, обеспечивающего формирование управ5
ляющего напряжения 31, полярность которого изменяется в моменты опрокидывания фазы выходной ЭДС датчика. Схема управления формирует также две последовательности импульсов 32 и 33, сдвинутых один относитешьно другого на половину периода. VroJt сдвига о импульсов относительно начала соответствующих полупериодов напряжения питания может регулироватся, но одновременно для обеих последовательностей.
Напряжение 31 управляет логической cxBMoRf которая, в зависимости от полярности этого напряжения, о туществляет переключение последовательностей импульсов 32, 33 с одной группы тиристоров на другую. Например, в один из полупериодов последовательность 32 подается на., управляющие электроды тиристоров 16,19, 21,22. Если в этот полупериод потенциал верхней клем1 ы источника вьше,ток замыкается по цепи: тиристор 16, полусекция 8, тиристор 22. Во второй полупериод последовательность 33 подается на тиристоры 17,18,20,23, и ток замыкается по цепи: тиристор 23, полусекция 8, тиристор 17. В .полусекции 8 протекает переменный ток, действующее значение которого ьюжет в широких пределах регулироваться выбором значений угла включения тиристоров сА . Если переключать последовательности импульсов 32, 33 с одной указанной группы тиристоров на другую, происходит опрокидыванне фазы тока 34 в полусекции в на 180 эл.град. (момент t, на фигЛО),в чем .и состоит сущность коммутации токов в секциях обмотки индуктора. Подобная коммутация токов в секциях осуществляется один раз в пределах каждого полюсного деления электродвигателя,., причем в двух полусекциях составляющих данную секцию обмотки и-ндуктора,например в
полусекциях 8 и 9, осуществляется одновременно,поскольку этот процесс управляется одно и; той же логической схемой по сигналам одного и того же дифференциальног-о трансформатора датчика. Для различных же секций коммутация осуществляется со сдвигом во времени, так как процесс коммутации управляется по сигналам с выходных обмоток различных дифференциальных трансформаторов, С1 и нтированных на подвижном экипаже с пространственным сдвигом.
Выбор момента коммутации в пределах каждого полюсного деления для любой секции первичной обмотки зависит от двух факторов: от взаимного расположения вторичного элемента датчика линейного перемещения - ферромагнитных полос 27, 28 - относительно поперечных перемычек 6 направляющего полотна и отвзаимного расположения системы дифференциальных трансформаторов 24 относительно магитопровода индуктора 1. Картины распределения магнитного поля индуктора относительно поперечных перемлчек направляющего полотна, показанные на фиг. 4,5,12, соответствуют выбору момента коммутации, обеспечивающего максимальное значение усилия F, действующего на эти nepeNftii4KH (скорость движения V экипажа относительно направляющего полотна имеет противоположное направление). Выбором момента коммутации можно регулировать величину этого усилия от нуля до максимума.
Показанные на фиг, 3 или 11 конструкции первичной обмотки и коммутация токов в ее секциях обеспечиваю в процессе движения образование в кадый момент времени в пределах любых соседних полюсных делений магнитных полей разных направлений (фиг.3,4,5, 12), силовые линии которых замыкаются в вертикальных плоскостях. Взаимная пространственная ориентация магнитных потоков, созданных совместным действием всех секций первичной обмотки индуктора, и потоков, созданных токами, индуктированньлми в короткозамкнутых контурах направляющего полотна,, остается в процессе движения практически неизменной, причем обмотка индуктора создает линейно перемещающееся магнитное поле, одновременно пульсирующее с частотой сети,
Работа электродвигателя характеризуется следующей особенностью. Если магнитопровод индуктора перемещается относительно направляющего полотна,, например, слева направо, магнитное поле, созданное токами первичной обмотки, перемещается относительно магнитопровода индуктора с той же скоростью справа налево и поэтому неподвижно относительно короткозамкнутых контуров с токами, индуктированными в направляюкСем полотне. Исключение составляют крайкие контуры, в связи с чем предпочтительна конструкция в многополюсном выполнении. Поэтому в первом приближении южнo считать, что в контурах направляющего полотна индуктируется только трансфоркаторная ЭДС,а ЭДС перемещения наводится только в первичной обмотке в св.чзи с чем ее можно назвать обмоткой якоря. В процессе перемещения с высокой скоростью вторичном элементу электромагнитным путем передается сравнительно небольшая часть потребляемой энергии.
Взаимодействие магнитных потоков созданных первичной обмоткой, с TOKai G-s в короткозамкнутых контурах направляющего полотна ка участках поперечных перемычек вызывает возникновение продольного движущего усилия, по своей природе близкого к репульсионному. Электромагнитная сила притяжения полюсов индуктора к магнитопроводу направляющего полотна используется для создания системы электромагнитного подвеса экипажа работа которой характеризуется в это случае двумя существенными особенностями.
Во-первых короткозамкнутые контуры .направляющего попотна по отношению к обмотке индуктора представляют собой систему вторичных обмоток трансформатора, токи в которых создают собственные магнитные потоки, являющиеся по отношению к потоку первичной обмотки преимущественно размагничивающими, как и в обычном трансформаторе. Указанный фактор является в определенной степени стабилизирующим, всякое увеличение магнитного потока первичной обмотки, чем бы оно ни было вызвано (например уменьшением воздушного зазора) сопровождается и увеличением размагничивающих потоков вторичных обмоток - короткозамкнутых контуров.
Во-вторых,осуществляющее подве магнитное поле индуктора в процессе движения экипажа оказывается неподвижным по отношению к направляющему полотну (если пренебречь краевыми эффектами).
Таким образом, тяговое усилие и силы подвеса создаются с помощью одних и тех же конструктивных элементов, а работа систеь подвеса не связана с потреблением дополнительной энергии от сети.
Особенность работы линейного электродвигателя, совмещенного с системой подвеса, заключается в том, что вертикальные усилия подвеса должны существенно превосходить по величин тяговые усилия. Таким образом, суммарный магнитный поток электродвигателя должен быть достаточно большим. Конструкция первичной обмотки, показанная на фиг.11, 12, по сравнению с распределительной обмоткой (фиг.З) отличается повышенной собственной индуктивностью. Эта особенность в специфических условиях использования электродвигателя является преимуществом перед обычными распределительными обмотками.
Регулирование режимов движения и работы системы подвеса с минимальным взаимным влиянием построено следующим образом. Поскольку все посекции первичной обмотки включены в отдельные мостовые схемы коммутатора, подобные изображенной на фиг.6, величина тока в полусекциях может регулироваться независимо изменением угла л включения тиристоров. Например, токи в полусёкциях 8 и 9, составляющих одну секцию обмотки,
могут быть различны, хотя коммутация токов (т.е. опрокидывание их по фазе) происходит в обеих полусекциях одновременно. Для автоматического регулирования величины воздушного зазора между индуктором и направляющим полотном необходимо по краям индуктора установить два датчика, регистрирующих величину зазора (индуктивных, емкостных или каких-либо других). Один из датчиков регули0рует угол включения тиристоров полусекций 8f 10, 12, 14, т.е. в конечном счете величину магнитных потоков и сил притяжения в пределах половины длины индуктора, второй-датчик -
5 угол включения тиристоров полусекций 9,11,13,15. Подобная система позволяет поддержив4ть одинаковую величину зазора по всей длине индуктора при различном характере распределения весовой нагрузки. Применение же
0 двух линейных электродвигателей (фиг.1) позволяет избежать также и перекосов относительно продольной оси экипажа.
5
В процессе движения мгновенные значения токов в секциях могут изменяться при регулировании в достаточно широких пределах, однако в среднем их действующие значения остаются постоянными, поскольку приблизитель0но постоянными остаиотся весовая нагрузка и требуемая величина.зазора. Поскольку закон изменения угла открытия тиристоров определяется режимом работы системы подвеса, этот
5 способ управления не может, одновременно принимать для регулирования величины тягового усилия, а следовательно, и скорости движения экипажа. Таким образом, двигатель должен до0пускать применения второго способа регулирования, не связанного с изменением величины токов в секциях первичной обмотки. С этой целью используется способ, заключающийся в
5 механическом перемещении системы дифференциальных трансформаторов относительно магнитопровода индуктора, т.е. способ регулирования положения линии коммутации в пределах площади
0 короткозамкнутых контуров направляющего полотна., позволяющий осуществлять регулирование скорости в широких пределах, а также торгжзжение и реверс без существенного влияния на режим работы системы подвеса.
5 Это влияние сводится к двум факторам: изменению действующего значения токов в секциях первичной обмотки при изменении скорости движения экипажа вследствие зависимости ЭДС пе0ремещения от скорости, а также в изменении коэффициента магнитной связи между первичной обмоткой и короткозамкнутыми KOHTS aMH направляющего полотна в процессе регулирования.
5 Поскольку процессы разгона и торможения экипажа достаточно инерционны эти влияния на работу системы подве са могут быть скомпенсированы регул рованием угла включения тиристоров. Боковая стабилизация экипажа обе печивается автоматически, поскольку при любом смещении экипажа отно(Л1тельно направляющего полотна возникают реактивные усилия, связанные с деформацией силовых линий магнитного поля электродвигателя и препят ствующие подобному смещению. В случае необходимости система стабилизации может быть дополнена злектромахнитами, вторичным элементом для которых может.служить боковая поверхность швеллера направляющего полотна Технико-экономической целесообразностью применения предложенного &лектродвигателя является совмещение систем электромагнитного подвеса экипажа с собственно тяговы1л линейным электродвигателем, что улуч шает энергетические и весо-габаритйые показатели транспортной систекм уменьшает габариты и вес электросилового оборудования, устанавливаемого на подвижном экипаже, а также упрощает конструкцию и уменьшает стоимость направляющего полотна эле тродвигателя за счет применения стандартных изделий массового П1роиз :водст ва. Формула изобретения 1. Линейный электродвигатель, содержащий- индуктор, включающий магнит провод с обмоткой, секции которой подключены к источнику через вентиль ный коммутатор, и вторичный элемент У///////7Л выполненный в виде направляющего полотна, отличающий ся тем, что, с целью обеспечения усилий электромагнитного подвеса при возможности их независимого регулирования, направляющее полотно представлЯ ет собой металлический элемент П-образного сечения, например швеллер, в котором размещен шихтованный ферромагнитный пакет, отделенный от внутренней горизонтальной поверхности П-образного элемента изолирующей прокладкой и опирающийся снизу на поперечные электропроводные перемычки, соединенные с краями П-образкого элемента механически и электрически и расположенные вдоль направляющего полотна на расстоянии одна от другой, равном полюсному делению. 2, Электродвигатель по п.1, отличающийся тем, что, с целью обеспечения возможности регулирования усилий подвеса по длине индуктора, каждая секция обмотки разделена по длине на две одинаковые полусекции, расстояние между началом и концом ка1ждой из которых равно t{m/2-1) , где f - полюсное деление, m - число полюсных делений в пределах длины индуктора, причем га - число четное, а расстояние между концом одной и началом второй полусекции составляет одно полюсное деление „ Источники информации, принятые во знимание при экспертизе 1.Патент ФРГ 2029462, кл. 21 а 23, 1973. 2,Авторское свидетельство СССР по заявке 2338856/24-7, кл, Н 02 К 41/02, 1976. 54 II У / J
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный электродвигатель | 1977 |
|
SU693514A1 |
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
| Линейный электродвигатель | 1976 |
|
SU655038A1 |
| Вентильный электродвигатель | 1978 |
|
SU758416A1 |
| Трансформаторный датчик положения ротора вентильного электродвигателя | 1976 |
|
SU688966A1 |
| Электропривод | 1975 |
|
SU597051A1 |
| ЛИНЕЙНЫЙ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
SU1371370A1 |
| Линейный синхронный электродвигатель | 1985 |
|
SU1350779A1 |
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
О
Vut.e
Риг.9
