Изобретение относится к электротехнике и может быть использовано в прецизионных приводах с электродвигателями .
К электродвигателям, используемым В прецизионных системах автоматического регулирования, в приборах записи, воспроизведения и передачи информации, в оптикомеханических системах и в электромеханических устройствах радиоэлектронной аппаратуры, в настоящее время предъявляются высокие требования по стабильности частоты вращения ротора при изменении момента нагрузки, напряжения питания,температуры и других дестабилизирующих факторов. Устройства для стабилизации частоты вращения электродвигателей должны обеспечивать высокую точность стабилизации средней и мгновенной частот вращения электродвигателей, обладать высоким быстродействием и надежностью и характеризоваться простотой конструкции.
Известно устройство для стабилизации скорости вращения электродвигателя постоянного тока,содержащее импульсный генератор опорной частоты, импульсный тахогенератор (таходатчик) дискретнофазовый регулятор, состоящий из двух каналов - частотного и фазового, усилитель, элементы И и НЕ и ключ динамического торможения 1 3.
Недостатком известного устройства является погрешность стабилизации мгновенной частоты вращения двигателя, вызванная влиянием неточности изготовления модулятора импульсного таходатчика.
Погрешность изготовления таходатчика, например непостоянство шага между модуляционными метками, а также эксцентриситет и биение модулятора, приводит к нарушению пропорциональности между частотой вращения электродвигателя и частотой сигнала на выходе таходатчика, т.е. приводит к так назьшаемой частотной погрешности таходатчика, которая содержит ложную информацию как о частоте так и о фазе вращения двигателя, а устройство для стабилизации отрабатывает ее как статическую ошибку,увеличивая неравномерность вращения. Точное изготовление таходатчика, имеющего минимальную частотную погрешность выходного напряжения, связано с техническими трудностями и .. значительной стоимостью.
Наиболее близким к предлагаемому является устройство для стабилизации частоты вращения электродвигателя, содержащее последовательно сое- , диненные генератор импульсов, дискриминатор, сумматор и формирователь управляющего сигнала, подключенный к электродвигателю, второй дискриминатор, один вход которого подключен к генератору импульсов, а выход связан с вторым входом сумматора, две цепи, каждая из которых состоит из последовательно соединенных таходатчика и импульсного усилителя, выходы усилителей подключены к вторым входа первого и второго дискриминат-ъров соответственно. Каждый из таходатчиков представляет собой источник излу-чения, оптическую .систему, фотоприемник и расположенный между ними модулятор в виде светонепроницаемого диска с множеством прорезей - модуляционных меток. Таходатчики размещены один отнЬсительно другого со сдвигом на 1.80 в направлении вращения общего для обоих таходатчиков модулятора, жестко закрепленного на оси двигателя. Формирователь управляющего сигнала э предлагаемом устройстве содержит последовательно соединенные корректирующий четырехполюсник, усилитель постоянного тока, фазовращатель, к импульсному входу которого подключен с выхода генератора делитель частоты, второй делитель частоты с коэффициентом деления 2 и усилитель мощности. .
Опорные импульсы от генератора импульсов подаются на входы дискриминаторов, на другие входы которых с выходов таходатчиков поступают им пульсы, усиленные и сформированные усилителями. Сигналы, снимаемые с выходов дискриминаторов и пропорциональные фазовому сдвигу между опорными импульсами и импульсами таходатчиков , складываются сумматором и поступают далее на формирователь управляющего сигнала, который оказывает воздействие на фазу напряжения питания двигателя.
Эксцентриситет модулятора таходатчиков при вращении двигателя приводит к изменениям радиуса средней линии модуляционных меток и их линейной скорости относительно таходатчиков и, как следствие, изменяется мгновенная частота следования импульсов на выходах таходатчиков. При этом в диаметрально противоположных точках модулятора эти изменения взаимно пропорциональны и имеют противоположный знак. Расположение двух таходатчиков через 180 и сложение их сигналов на выходах дискриминаторов компенсирует противофазные погрешности частоты их импульсов, обусловленные влиянием эксцентриситета модулятора, что в итоге обеспечивает равномерность вращения двигателя при, несколько сниженных требованиях к точности изготовления модулятора 123.
Недостатком является то, что устройство характеризуется сложностью изготбвления, обусловленной высокими требованиями к постоянству велич ны шага модуляционных меток модулятора таходатчика из-за отрицательного влияния непостоянства шага меток на равномерность частоты, вращен двигателя.. Цель изобретения - упрощение уст ройства для стабилизации частоты вращения электродвигателя. Поставленная цель достигается тем, что в устройство для стабилиза ции частоты вращения электродвигате ля, содержащее последовательно соединенные генератор импульсов, -первый дискриминатор, сумматор и форми рователь управляющего-сигнала, подключенный к электродвигателю, второ дискриминатор, один вход которого подключен к генератору импульсов, а выход связан с вторым входом сумматора, две цепи, каждая из которых состоит из последовательно соединен ных таходатчика и импульсного усили теля, выходы усилителей подключены к вторым входам первого и второго дискриминаторов соответственно, дополнительно введены фильтр высших частот, инвертор и блок задержки, включенный между выходом импульсног усилителя и вторым входом второгЬ дискриминатора, выход которого чере последовательно соединенные фильтр высших частот и инвертор подключен к второму входу сумматора. На фиг.1 изображена функциональна схема предлагаемого устройства; на фиг.2 - конструктивная схема разме1щенйя таходатчиков в устройстве при использовании датчиков фотоэлектрического типа; на фиг.З - временная диаграмма, поясняющая работу устройства при изменении частоты вращения двигателя; на фиг,4 - временная Диаграмма, поясняющая работу устройства при непосто.янстве шага модуляционных меток модулятора таходатчиУстройство для стабилизации час- тоты вращения электродвигателя 1 содержит последовательно соединен- . ные генератор 2 импульсов, дискриминатор 3, например, частотно-фазовый, сумматор 4 и формирователь 5 управляющего сигнала, подключенный к электродвигателю 1, две цепи, одна, из которых состоит из последовательн соединенных таходатчика 6 и импульсноге усилителя 7, а вторая - иэ та-. ходатчика 8 и импульсного усилителя 9, дискриминатор 10 один вход которого подключен к генератору 2 импульсов , Кроме того, устройство содержит блок II задержки, включенный между выходом импульсного усилителя 7 и вторым входом дискриминатора 10, выход которого через последовательно соединенные фильтр 12 высших частот и инвертор 13 подключен к второму входУ сумматора 4. В устройстве могут использоваться таходатчики различного типа такие, например, как индукционные, индуктивные, емкостные или фотоэлектрические, которые генерируют на выходе переменное или импульсное напряжение с частотой модуляции соответственно магнитного, электромагнитного, электрического или светового потока. Общий для обоих таходатчиков модулятор жестко соединен с вращающимся валом (ротором) электродвигателя, при этом угловой шаг модуляции несколько больше угла размещения датчиков. В качестве примера на фиг.2 показано размещение фотоэлектрических таходатчиков. Таходатчики 6 и 8 содержат последовательно установленные источник 14 излучения лучистой энергии, оптическую систему 15, модулятор 16 и два фотоприемника 17 и 18, размещенных рядом со сдвигом один относительно другого в направлении вращения модулятора 16. Модулятор 1G выполнен в виде светонепроницаемого диска со щелевыми отверстиями, шаг между которыми несколько больые шагоиого расстояния между фотоприемниками 17 и 18. Выход фотоприемнчка 17, первого в направлении вращения модулятора, соответ- . ствует выходу таходатчика 6, а выход фотоприемника 18 - выходу таходатчика 8. . Устройство работает следующим образом. При включении устройства с выхода импульсного генератора 2 поступают импульсы напряжения (фиг.2,а) на входы дискриминаторов 3 и 10, на вы- ходе которых возникают постоянные напряжения. Выходное напряжение дискриминатора 3 обеспечивает через сумматор 4 и формирователь 5 управляющего сигнала подачу напряжения питания на двигатель 1 и его разгон. Постоянную составляющую и низшие частоты выходного напряжения дискриминатора 10 фильтр 12 не пропускает на вход инвертора 13 и далее на второй вход сумматора 4, поэтому его выходное напряжение равно напряжению на первом входе. При вращении двигателя 1 поочередно через одно и то же отверстие модулятора 16 освещаются источником 14 фотоприемники 17 и 18, на выходах которых возникают импульсы напряжения с частотой следования, раиной частоте модуляции светового потока, Вы:фдные напряжения таходатчиков 6 и 8 усиливаются и формируются в импульсы с крутыми фронтами усилителями 7 и 9 соответ-, ственно (фиг.3,6), Последовательности этих импульсов сдвинуты одна относительно другой на время tj, равное времени прохождения модуляционного отверстия между таходатчиками, расстояние между которыми постоянно. При постоянной частоте вращения двигателя 1 совместно с модулятором 16 это время постоянно и изменяется обратно пропорционально изменению частоты вращения двигателя. Усиленны импульсы таходатчика 6 - первого в направлении вращения модулятора 16 по тупают на вход блока 11 задержки импульсов с временем задержки, равным времени поворота модулятора 16 на угол между таходатчиками 6 и 8 с номинальной (заданной) угловой скоростью, и далее - на второй вход дискриминатора 10.
Усиленные импульсы (фиг.3,й) таходатчика 8 - второго в направлении вращения модулятора 16 поступают на второй вход дискриминатора 3. На выходах дискриминаторов 3 и 10 возникают напряжения, равные максимальным положительным значениям при отсутствии или при следовании импульсов от таходатчиков с частотой, меньшей частоты следования импульсов от генератора 2, равные нулю при следовании импульсов от таходатчиков с частотой, большей частоты импульсов генератора 2, и равные значениям,которые в виде ступенчатого сигнала изменяются от нуля до максимума и определяются фазовым сдвигом импульсов таходатчиков и генератора- 2 при совпадении частот их следования, т.е. в установившемся режиме. Номинальная частота.вращения электродвигателя в установившемся режиме определяется частотой следования импульсов генератора 2 и поддерживается .постоянной, компенсируя изменение возмущающих воздействий изменением установившегося значения фазового угла между импульсами генератора 2 и таходатчика 8.
При воздействии внешних факторов например, при увеличении момента нагрузки ,электродвигателя 1 или при уменьшении напряжения его питания, уменьшается частота вращения электродвигателя 1 и соответственно увеличивается фазовый угол между последовательностями импульсов генераторе 2 (фиг. 3,а) и таходатчиков 6 и 8 (фиг. 3,в). Увеличение фазового угла, между опорными импульсами гецератора 2 (фиг. 3,а) и импульсами от таходатчика 8 (фиг. 3,в) вызывает увеличение выходного напряжения дискриминатора 3 (фиг. 3,г). Импульсы от таходатчика 6 (фиг. 3,6) сдвигаются на постоянную величину времени блоком 11 задержки импуль- . сов (фиг. 3,д) для обеспечения временного совпадения напряжений в сумматоре 4. Фазовому углу между опорными импульсами (фиг. 3,а) и за
держанными импульсами .соответствует выходное напряжение дискриминатора 10 (фиг. 3, е). Кроме того, при уменьшении частоты вращения происходит относительное увеличение фазового угла между последовательностями импульсов от таходатчиков 6 и 8 и, соответственно, возникает различие в значениях выходных напряжений дискриминаторов 3 и 10. При увеличении
0 фазового сдвига между опорными импульсами и импульсами от таходатчиков 6 и 8 напряжение на выходе дискриминатора 3 становится больше, чем напряжение на выходе дискриминатора
5 10 на величину, -соответствующую относительному увеличению фазового сдвига между импульсами таходатчиков 6 и 8. Выходное напряжение дискриминатора 3 (фиг. 3, г) поступает на
Q-один из входов сумматора 4, а выходное напряжение дискриминатора 10 на вход ф1у1ьтра 12 высших частот, в качестве которого в простейшем случае может использоваться конден5 сатор. Фильтр 12 высших частот пропускает только переменную составляющую напряжения, задерживая постоянную составляющую и медленные изменения напряжения. Целесообразно, чтобы частота среза фильтра 12 высших частот равнялась или была выше частоты вращения двигателя, но находилась ниже частоты модуляции (дискретизация) . Тогда переменному напряжению (фиг. 3,ж) на выходе фильтра 12 со5 ответствует изменение частоты вращения двигателя 1 за время менее одного оборота или изменение частоты модуляции, обусловленное эксцентриситетом, биением или непостоянством
0 шага модулятора 16. Аналоговый инвертор 13, представляющий собой инвертирующий усилитель с единичным коэффициентом усиления, например эмиттерный повторитель, изменяет на
5 180 .фазу переменного напряжения на выходе фильтра 12. Выходное напряжение инвертора 13 (фиг.З, з) поступает на другой вход сумматора 4, который (Складывает это напряжение с выходным
напряжением дискриминатора 3. Выходное напряжение сумматора 4 (фиг.З,и) содержит постоянную составляющую, соответствующую фазовому углу между опорными импульсами генератора 2 и импульсами от таходатчика 8, и пере55 менную составляющую, соответствующую только изменению фазового угла между импульсами от таходатчикйв 6 И 8, что.имеет место при изменении частоты вращения двигателя, т.е. при отк60 лонении фактического времени прохождения каждой модуляционной меткой модулятора 16 между чувствительными элементами (фотоприемниками 17 и 18) таходатчиков 6 и 8 от постоянного
65 значения времени задержки, которое Обеспечивается блоком 11 эаде эжки.,. . в итоге, при увеличении фазового угла между импульсами от таходатчи ков 6 и 8 и генератора 2 выходное на.пряжение сумматора 4 (фиг.3,и) увеличивается, с помощью формироват ля 5 увеличиваются напряжение или частота питания электродвигателя 1 и, как следствие, увеличивается час тота его вращения, стремясь к номинальному значению. При уменьшении момента нагрузки электродвигателя 1 или при увеличении напряжения его питания, приведшем к увеличению частоты его вращения, происходит обратный процесс. Таким образом, замкнутый контур регулирования путем изменения напря жения или какого-либо другого, управ ляющего воздействия на электродвига тель поддерживает стабильной среднюю Частоту его вращения при воэде :ствии внешних факторов по сигналу ошибки, зависящему от сдвига по фазе между, импульсами генератора опор ной частоты и таходатчика. Рассмотрим работу устройства при непостоянстве шага модуляционных ме ток модулятора на примере использования таходатчиков фотоэлектрического типа, показанного на фиг.2. Оптическая система.15 преобразует световой поток точечного источника 14, расположенного вблизи модулятора 16, в световой поток с мнимым цент.ром излучения на оси вращения модулятора, обеспечивая для каждого фотоприемника одинаковые условия модуляции светового потока. В этом случае непостоянство углового шага между модуляционными метками (равно как биение и эксцентриситет), не влияет на время прохождения одной и той же метки от одного таз одатчика до другого, т.е. не влияют на время сдвига последовательностей импульсов на выходах таходатчиков даже при наличии частотных погрешностей самих таходатчиков 6 и 8. в установившемся режиме при равномерном вращении двигателя 1, т.е. с постоянной угловой скоростью и при совпадении частоты опорных импульсов генератора ,.2 (фиг.. 4, к) и импульсов от таходатчиков 6 и 8 (фиг.4, л, м), имеют место только паразитные синфазные и одинаковые см.ещения фазового угла между опорными импульсами и импульсами от каждого из таходатчиков 6 к 8, обусловленные их частотными по-Г5ешностями. С выхода усилителя 9 .. импульсы от таходатчика И постуЯают на вход дискриминатора 3, на выходе которого формируется напряжение (фиг. 4,н), соответствующее фазовому углу между опорными импульсами и импульсами от таходатчика 8. Импульсы от таходатчика. 6 (фиг. ,п), усиленные усилителем 7 и задержанные блоком 11 задержки на время, равное времени поворота модулятора с номи- нальной частотой вращения на угол между таходатчиками 6 и 8, поступают на вход дискриминатора 10 (фиг. 4,о) одновременно с усиленными усилителем 9 импульсами от таходатчика 8 (фиг. 4, м), поступающими на вход дискриминатора 3. В этом случае паразитные изменения выходных напряжений дискриминаторов 3 и 10 (фиг.4,н п), обусловленные синхронными частотными погрешностями таходатчиков, также ЯВ.ПЯЮТСЯ синфазными и равными по величине. Выходное напряжение (фиг. 4,п) дискриминатора 10 поступает на фильтр 12 высших частот, который пропускает только переменную составляющую напряжения, задерживая постоянную составляющую и медленные изменения напряжения. Переменному напряжению (фиг. 4, р) на выходе фильтра 12 высших частот, поступающему далее после инвертора 13. на сумматор 4, соответствует при равномерном вращении двигателя только паразитное изменение частоты модуляции обусловленное неточностью изготовления модулятора 16, таких как неравномерность шага, эксцентриситет и биение. На один вход сумматора 4 поступают сигналы от дискриминатора 3 (фиг. 4, н), содержащие как постоянную составляющую, обусловленную установившимся фазовым углом между импульсами генератора 2 и таходатчика 8, так и переменную составляющую, обусловленную частотной погрешностью таходатчика 8. Одновременно на другой вход сумматора 4 поступают сигналы с выхода инвертора 13 (фиг.4,с), содержащие только переменную составляющую, обусловленную .частотной ПО4;решностью таходатчика б. Переменные составляющие выходных напряжения . Дискриминатора: 3 и инвертора 13 равны между собой и поступают на входы сумматора 4 в противофазе, поэтому на выходе сумматора 4 (фиг. 4, т) имеет место только постоянная соЧзтавляющая напряжения, т.е. частотные погрешности таходатчиков 6 и 8 компенсируются, паразитные изменения управляюгцего сигнала отсутствуют и, как следствие, сохраняется равномерной частота вращения двигателя 1. Точность компенсации частотных погрешностей таходатчиц-ов повышается при снижении частоты среза фильтра ;12 высших частот, а скорость устрем ленйя к нули ошибки рассогласования фактической и номинальной частот вращения, которая возникает, например, в процессе изменения момента нагрузки .электродвигателя, увеличи-ается при повышении частоты среза фильтра 12 высших частот.
Таким образом, предлагаемое устройство путем изменения управляющего сигнала, подаваемого на электродвигатель, поддерживает стабильной частоту его вращения под воздействием дестабилизирующих.факторов и при наличии частотных погрешностей таходатчиков, характеризуется высокой точностью стабилизации частоты
(iJ
вращения злектродвигателя, но при более низких требованиях к точности изготовления модулятора.
Так как в зтом устройстве на равномерность вращения электродвигателя
не оказывает влияние неравномерность шага модуляционных меток, то для их нанесения не требуется уникальное прецизионное оборудование, поэтому устройство может изготавливаться в
условиях промышленного производства.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации частоты вращения электродвигателя (его варианты) | 1980 |
|
SU1053247A1 |
| Устройство для стабилизации скорости вращения электродвигателя | 1980 |
|
SU989720A1 |
| Электропривод | 1981 |
|
SU1003285A1 |
| Устройство для частотно-фазового регулирования скорости движения магнитной ленты | 1979 |
|
SU858090A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| Устройство для контроля оптической передаточной функции оптических систем | 1988 |
|
SU1589099A1 |
| Устройство регулирования частоты вращения магнитных дисков | 1980 |
|
SU930372A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1977 |
|
SU699643A2 |
| Лентопротяжный механизм аэрофотоаппарата | 1977 |
|
SU708286A1 |
| СИСТЕМА СТЕРЕОФОНИЧЕСКОГО ВЕЩАНИЯ | 1992 |
|
RU2040859C1 |
УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ, содержащее последовательно соединенные генератор импульсов, первый дискриминатор, сумматор и Формирователь управляющего сигнала, подключенный к электродвигателю, второй дис.криминатор, один вход которого подключей к генератору импульсов, а выход 1 связан с вторым входом сумматора, две цепи, каждая из которых состоит из. последовательно соединенных таходатчика и импульсного усилителя, вых.оды усилителей подключены к вторым входам первого- и второго дискриминаторов соответственно, о т л и ч а ющ е е с я тем, что, с целью упрощения, в него дополнительно введены .фильтр высших частот, инвертор и блок задержки, включенный между выходом импульсного усилителя и вторым входом второго дискриминатора, выход которого через последовательно соединенные фильтр высших частот и инвертор подключен к второму входу сум-§ матора. (Л Миагр СЛ О5 00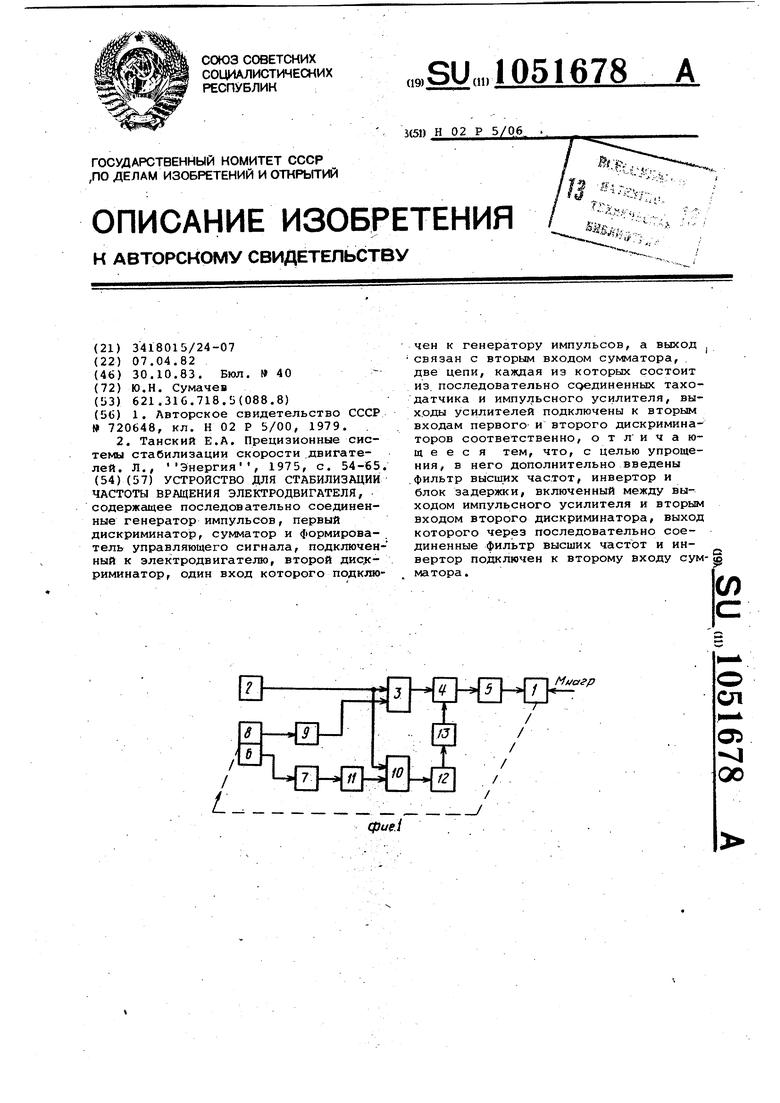
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| "Устройство для стабилизации скорости вращения электродвигателя постоянного тока | 1975 |
|
SU720648A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Танский Е.А | |||
| Прецизионные системы стабилизации скорости .двигателей | |||
| Л., Энергия, 1975, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
