(5) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ МАГНИТНЫХ ДИСКОВ
I
Изобретение относится к приборостроению, в частности к устройствам магнитной записи, обеспечивающим постоянн 1Э- относительную скорость . между носителем информации и магнитной головкой, и может быть использовано в аппаратуре магнитной записи на дисках.
Известно устройство записи сигнала на видеодиск, содержащее привод вращения видеодиска, тахогенератор, усилитель, соединенный с электродвигателем, компаратор фаз и генератор опорного сигнала tl.
Недостатком этого устройства является низкая точность стабилизации частоты вращения магнитных дисков, связанная с Тем, что для повышения точности поддержания заданной скорости необходимо уменьшать зону нечувствительности устройства выделения ошибки, которым в данном случае является компаратор фаз. Для этого необходимо увеличить значение частот
которые подаются на входы компаратора фаз.
Однако повышение указанных част тот ограничено снижением устойчивости работы электропривода при воздействии внешних возмущений. Это обусловлено тем, что рабочая зона компаратора фаз принципиально ограничена одним периодом частоты опорного генератора.
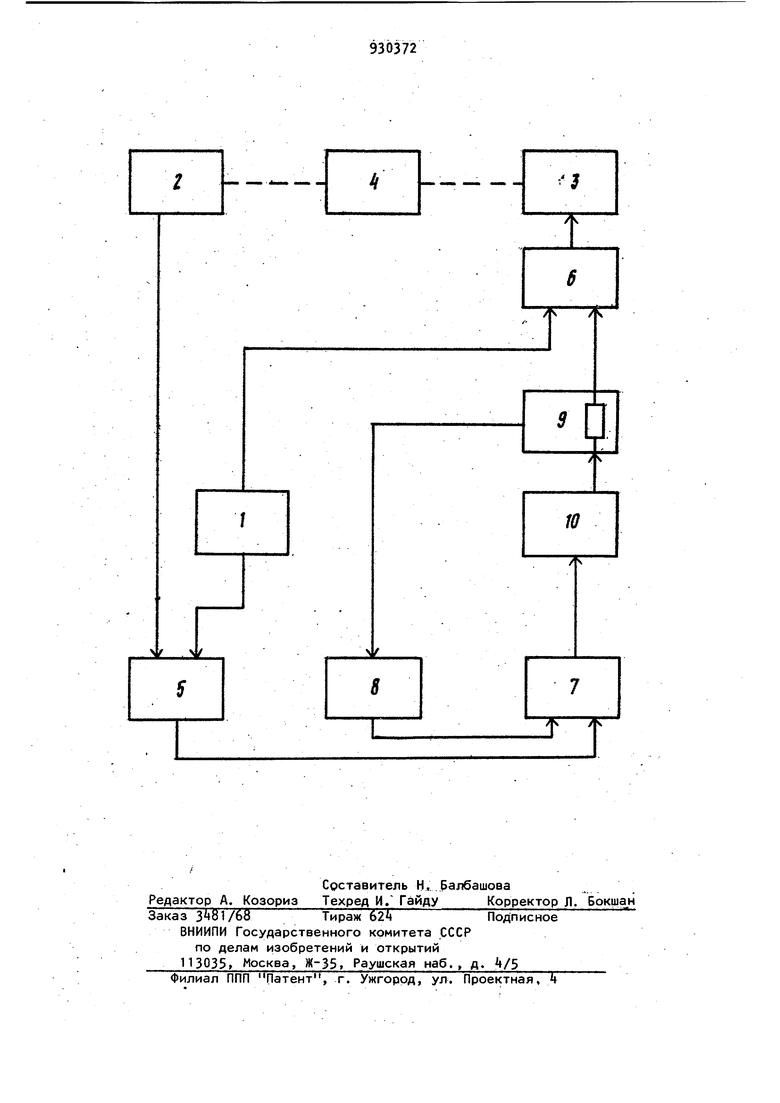
Известно также устройство для регулирования частоты вращения MSI- нитных дисков, содержащее опорный генератор, датчик частоты вращения, установленный на одном валу с двигателем и магнитными дисками и присоединенный к одному входу фазового дискриминатора, второй вход которого присоединен к одному выходу опорного генератора, преобразог ватель частоты, подключенный к электродвигателю, а вход усилителя мощности присоединен к опорному генератору 123. Недостатком этого устройства является недостаточная стабильность частоты вращения магнитных дисков. Цель изобретения . повышение стабильности частоты вращения магнитных дисков. i Это достигается тем, что в устройство, содержащее опорное устройство для регулирования частоты вращ ния магнитных дисков, содержащее установленный на одном валу с электродвигателем и магнитными дисками датчик частоты вращения, соединенный с одним входом фазового дискриминатора, генератор опорной частоты один выход которого подсоединен к йторому входу фазового дискриминатора, а второй выход - к первому входу преобразователя частоты, выход-кото рого соединен с электродвигателем, введены сумматор, фильтр низкой частоты, регулятор напряжения и датчик тока в виде потенциометра, подключенный нерегулируемыми вывода ми между выходом регулятора напряжения и входом преобразователя частоты, а регулируемым выводом - с входом фильтра низкой частоты, выход которого подсоединен к одному из входов сумматора, второй вход которого соединен с выходом фазового дискриминатора, причем выход сум матора подсоединен к входу ре улято ра напряжения. На чертеже показана блок-схема предлагаемого устройства. Устройство содержит генератор 1. опорной частоты с двумя выходами, выполненный по схеме мультивибратора с кварцевой стабилизацией частоты на логических элемента 2И-НЕ; датчик 2 частоты вращения, предста ляющий собой импульсный индукционный датчик, выполненный в виде неподвижной магнитной головки и жестк укрепленный на одном вал/ с электро двигателем 3 и магнитными дисками Ц зубчатого колеса из магнитомягкого материала, выход которого присоединен к одному входу фазавого дискриминатора 5, состоящего из R-S-триггера, двух 1-К-триггёров со счетными и установочными входами, входной и выходной логики и фильтра нижних частот, второй вход фазового дискриминатора 5присоединён к первому выходу генератора 1 опорной частоты; преобразователь 6 частоты, представляющий ч;обой статический 24 преобразователь частоты, состоящий из трехфазного мостового транзисторного инвертора, формирователя импульсов управления ключами инвертора и согласующего усилителя мощности с трансформаторным выходом, один вход преобразователя частоты 6 подключен к второму выходу генератора 1опорной частоть, сумматор 7 на операционном усилителе с. дифференциальными входами, к одному входу которого подсоединен выход фазового дискриминатора 5 а к второму - выход фильтра 8 нижних частот, KOTOрый выполнен в виде активного R-C-фильтра на операционных усилителях , вход которого соединен с выходом датчика 9 тока на прецизионном низкоомном потенциометре, причем выход сумматора 7 последовательно через регулятор 10 напряжения, состоящий из управляемого выпрям ителя на тиристорах с фильтром и схемы управления, и датчик тока 9 присоединен к второму входу усилителя мощности 6. Устройство работает следующим образом . , Электродвигатель- 3 приводит во вращение магнитные диски 4, расположенные на одном валу с датчиком 2скорости. Электродвигатель 3 является синхронным и питается от преобразователя 6 частоты, выходная частота которого задается частотой сигнала на втором выходе генератора 1опорной частоты. Датчик 2 частоты вращения вырабатывает сигнал с частотой, пропорциональной скорости вращения магнитных дисков . Сигнал с датчика 2 частоты вращения и сигнал с опорного генератора 1 подается на фазовый дискриминатор 5 сигнал на выходе которого пропорционален фазовому сдвигу, между сигналами опорного генератора 1 и датчика 2частоты вращения. Так как скорость вращения поля статора электродвигателя 3 пропорциональна частоте генератора 1 опорной частоты, а частота сигнала, датчика 2 частоты вращения пропорциональна скорости вращения ротора электродвигателя, то сигнал на выходе фазового дискриминатора 5 пропорционален фазовому сдвигу между полем статора и ротором электродвигателя 3. Сигнал фазового дискриминатора 5 подается на сумматор 7Сигнал датчика 9 тока содержит составляющую, пропорциональную фазо вому сдвигу между полем ротора и статора (полезный сигнал), и пульсации, возникающие за счет переходных процессов при переключении ключей в автономном инверторе (сигнал помехи). Сигнал датчика. 9 тока пода .ется на сумматор 7 через фильтр ниж них частот, где происходит частично ослабление сигнала помехи. Ток в датчике 9 соответствует току статора электродвигателя 3Скорость двигателя 3 остается по тоянной, если соблюдается баланс моментов, подводимых к двигателю: электромагнитного и момента нагрузки. Она изменяется при нарушении этого баланса. Электромагнитный момент пропорци нален углу фаз между полем статора и полем ротора (угол нагрузки), а также току и напряжению в цепи стат ра. Изменение момента нагрузки при условии постоянства скорости синхронного двигателя вызывает изменени электромагнитного момента:.путем из менения угла нагрузки и тока в пита ющей сети, а следовательно и тока датчика ЭТочность измерения отклонения тока технически намного ниже, чем точность измерения отклонения раз-, ности фаз между полями статора и ро тора. Исходя из этого условия можно оценить целесообразность применения обратных связей по току или по углу .в зависимости от величины отклонения момента нагрузки и стабильности CKCJp рости, При сравнительно больших отклонениях момента нагрузки и малом коэффициенте стабилизации скорости целесообразно применять обратную связь по току, при малых изменениях момента нагрузки и большом коэффициенте стабилизации скорости - обратную связь по углу, а если требуется большой коэффициент стабилизации скорости и присутствуют большие изменения магнитного момента, то целесообразно применение комбинирован ного управления и по току и по углу что и сделано в предлагаемом устройс.тве. .. В сумматоре 7 происходит сложение выходных сигналов фазового дискриминатора 5 и фильтра 8 нижних частот. Как сигнал фазового дискрими26натора 5, так и полезная составляющая сигнала с фильтра 8 нижних частот пропорциональны фазовому сдвигу полей ротора и статора .электродвигателя 3 (т.е. углу качаний ротора электродвигателя 3i, следовательно, они синфазны и в сумматоре 7 складываются, тогда как сигнал помехи не увеличивается. Таким образом, на выходе сумматора 7 происходит относительное ослабление си1- нала помехи, или увеличение отношения сигнал/шум. Сигнал с выхода сумматора 7 с повышенным значением отношения сигнал/ шум подается на регулятор 10 напряжения, который в соответствии с указанным сигналом сумматора 7 регулирует напряжение питания на преобразователе 6 частоты, обеспечивая более точную стабилизацию частоты вращения электродвигателя 3 и магнитных дисков Ц. При значительных возмущениях со стороны нагрузки или питающей сети, когда фазовый дискриминатор 5 выходит за свою рабочую зону, полезный сигнал датчика 9 тока приобретает значительную величину и, управляя через фильтр 8 нижних частот и сумматор 7, регулятором 10 напряжения устанавливает ротор электродвигателя 3 относительно его статора таким образом, что фазовый дискриминатор вновь входит в рабочую зону. Таким образом, наряду с улучшением точности стабилизации частоты вращения магнитных дисков происходит увеличение устойчивости работы всего предлагаемого устройства. Благодаря введению сумматора, регулятора напряжения, фильтра нижних частот, датчика тока и соответствующих связей между ними повышается точность регулирования частоты враения магнитных дисков, что особенно ценно в случаях поступления значительных возмущений на диски. Устройство особенно эффективно, когда оно применено в аппаратуре магнитной записи, осуществляющей частотный анализ сигналлограмм. Изменение частоты вращения магнитных дисков влечет за собой появление аразитной частотной и фазовой модуяции, т.е. временную ошибку воспрозводимого сигнала. Для компенсации временной ошибки рименяются цифровые электронные KOMI
пенсатооы, памяти, габариты и стоимость которых зависят от величины временной ошибки на их входе.
Таким образом, прилагаемое устройство, повышая стаб(льность частоты вращения носителя, .существенИо уменьшает временную ошибку на входе электронного компенсатора, что приводит к уменьшению его объема памяти, габаритов и стоимости.
Формула изобретения
Устройство для регулирования частоты Вращения магнитных дисков, соДержащее установленный на одном валу с электродвигателем и марнитными дисками датчик частоты вращения, соединенный с одним входом фазового дискриминатора, генератор опорной MecTOTMj один выход которого подсоединен к второму входу фазового дискриминатора, а второй выход - к первому входу преобразователя частоты, выход которого соединен с электродвигателем, отличающееся тем, что, с целью повышения стабильности частоты вращения магнитных дисков, в него введены сумматор, фильтр яизкой частоты, регулятор напряжения и датчик тока в виде потенциометра, подключенный нерегулируемыми выводами между выходом
регулятора напряжения и входом преобразователя частоты, а регулируемым выводом .- с входом фильтра низкой частоты, выход, которого подсоединен к одному из входов сумматора,
второй вход которого соединен с выходом фазового дискриминатора причем выход сумматора подсоединен к входу регулятора напряжения.
Источники информации,
принятые во внимание при экспертизе
1.Патент США № Ц022Э(8, кл. 358-128, 10.05.77.
2.Патент Японии № 51 i7528,
кл. 102 Е - 25, 15.12.76 (прототип)
/V /ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1980 |
|
SU1059647A2 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1982 |
|
SU1051678A1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
Й
