СП
00
3158
Изобретение относится к измерительной технике и может быть использовано для контроля качества оптических систем, преимущественно длинно- фокусных, путем определения оптической передаточной функции (ОПФ).
Целью изобретения является повы- шение точности контроля.
На фиг. 1.изображена общая схема устройства на фиг. 2 - схема блока управления; на фиг. 3 - схема блока переключения.
Устройство состоит из коллимато- jра 1, в фокальной плоскости которого iустановлен тест-объект 2, выполнен- : ный в видр кольцевого радиального растра. Излучение коллиматора 1, прошедшее тест-объект 2 и объектив коллиматора виде параллельного пуч- ка поступает на вход испытуемой оп- тической системы 4, в фокальной плоскости которой установлена анализирующая щелевая диафрагма 5. За диафрагмой 5 установлен приемник 6 излуче- ния, к выходу которого подключены последовательно соединенные узкополосный электрический фильтр 7 и отсчет- ное устройство 8.
Тест-объект 2 установлен на валу электродвигателя 9, вход которого соединен с выходом блока 10 управления
I
частотой вращения электродвигателя:. На валу электродвигателя 9 устаноЕ - лен оптронный 11 . Входы
блока 10 управления частотой вращения электродвигателя соединены с генератором 12 импульсов регулируемой частоты, с генератором 13 импульсов стабильной частотыS с-генера- тором 14 одиночных импульсов, с переключателем 15 режима работы, с переключателем 16 направления враще1аия
и с переключателем 17 режима оста
ВОВКИ.
Блок 10 управления частотой вращения двигателя содержит широтно-им- пульсный модулятор (ШИМ) 1В, являющийся выходом блока 10 управления, блок 19 переключения, выход которо- го подсоединен к входу ШИМ 18. К входам блока 19 переключения подключены источник 20 постоянного управляющего сигнала, переключатель 15 режима работы, переключатель 16 направления вращения, переключатель 17 режима остановки, а также частотный дискриминатор 21 , который соединен с фа
зовым дискриминатором 22, с вспомогательным частотным детектором 23, с генератором 12 импульсов регулируе- емой частоты и с оптронным датчиком 11. С переключающим устройством 19 соединены также импульсный дискриминатор 24 и формирователь 25 истинного направления движения.
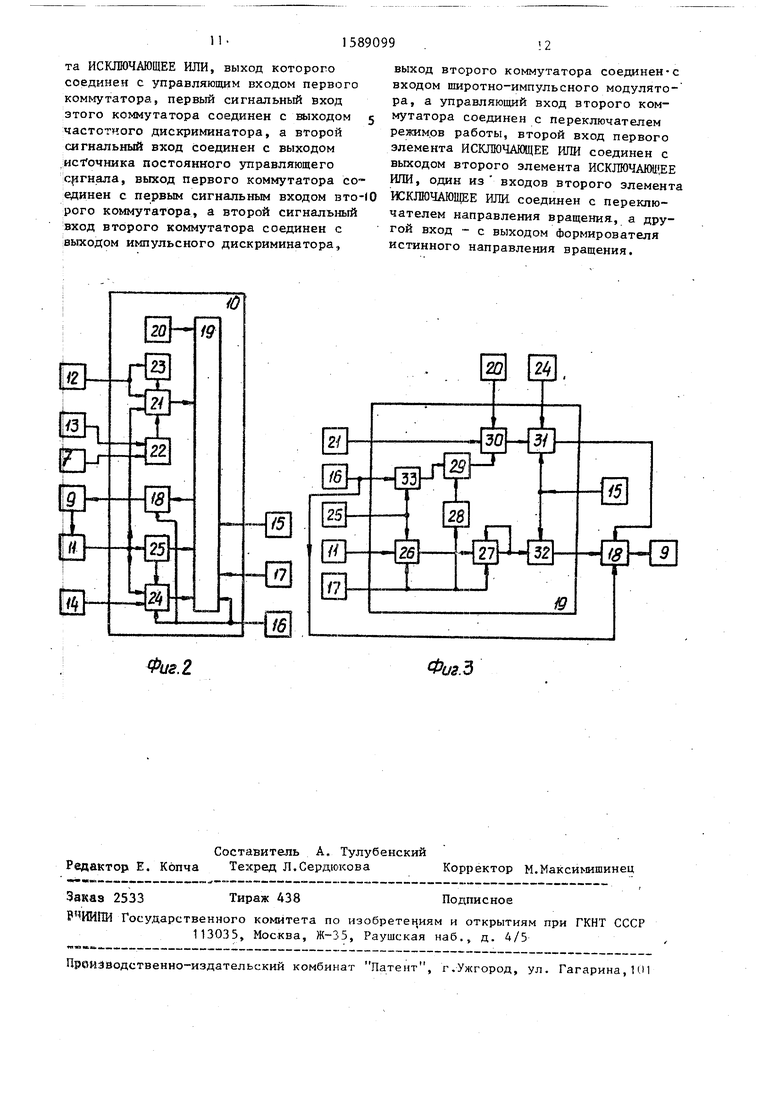
й 1пульсный дискриминатор 24 соединен с генератором 14 одиночных им- ,пульсов и оптронным датчиком 11, а формирователь 25 истинного направления движения - с выходом датчика 11 Блок 19 переключения содержит реверсивный счетчик 26 импульсов, счетный вход которого соединен с выходом оптронного датчика 11. Вход счетчика для команды Сложение-вычитание соединен с выходом формирователя 25 истинного направления вращения.Вход установки счетчика соединен с переключателем 17 режима остановки.
Кроме того, блок 19 переключения содержит мажоритарный элемент 27 име юпщй три входа: первый вход соединен с выходом счетчика реверсивного счетчика 26 импульсов, второй вход соединен С выходом переключателя. 17 режима остановки, а третий вход мажоритарного элемента соединен с его же выходом. Блок 19 переключения включает также инвертор 28, вход которог соединен с выходом переключателя 17 режима остановки, а выход соединен с одним из входом первого элемента . ИСКЛЮЧАЮЩЕЕ ИЛИ 29. Выход элемента ИСКЛЮЧАЮЩЕЕ -ИЛИ ТЭ соединен с управляющим входом первого коммутатора 30. Комм:/тируемые входы первого коммутатора 30 соединены с источником 20 постоянного управляющего сигнала и с частотным дискриминатором 21. Выход первого коммутатора 30 Соединен с одним из коммутируемых входов второго коммутатора 31. Другой вход второго коммутатора 31 соединен с выхо- дом импульсного дискриминатора 24.
Управляющий вход второго коммутатора 31 соединен с переключателем 15 режимов работы. Выход второго коммутатора 31 соединен с одним из входов ШИМ 18.
Блок 19 переключения содержит также элемент ИЛИ 32, один вход которого соединен с выходом мажоритарного элемента 27, а другой вход соединен переключателем 15 режимов работы.
Выход элемента 32 соединен с одним из входов ШШ 18. Кроме того, блок 19 содержит второй элемент ИСКЛЮЧАЮЩЕЕ ШИ 33, входы которого соединен с выходом переключателя 6 направления вращения и с формирователем 25 истинного направления вращения, а выход соединен с входом первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 29.
Устройство работает следующим образом.
Предварительно, исходя из про- граммы испытаний оптической системы рассчитывают необходи гую частоту вращения диска 2, а следовательно, вала двигателя 9. Например, если-уз кополосньй фильтр 7 имеет резонансную частоту 1000 Гц и тест-объект 2 имеет растр с общим числом штрихов 1000, то частота вращения тест-объета 2 должна быть равна 1 об/с. Соответственно этому генератор 13 импульсов стабильной частоты настраивают на частоту, равную резонансно частоте фильтра 7. Если растр оптро ного датчика 11 имеет 10000 штрихов на окружность, то при найденной частоте Вращения вала электродвигателя 9 в 1 об/с генератор 12 импульсов регулируемой частоты должен быть настроен на частоту следования импульсов 10000 Гц.
Также предварительно оператор устанавливает требуемый режим работы путем соответствующей установки переключателей режима работы 15 и направления вращения 16.
После выполнения указанных действий оператор переводит переключатель 17 режима остановки из положения Стоп в положение Вкл.. При этом начинается работа установки и происходит измерение ОПФ.
Импульсы с генератора I2 управляемой частоты и сигнал с оптронного датчика 1 поступают на частотный детектор 21, где производится сравнение двух сигналов и результат в виде электрического сигнала поступает на вход ШИМ 18. вспомогательный частотньй детектор 23 устанав- .ливает оптимальный коэффициент усиления системы применительно к данной частоте вращения электродвигателя 9. с ШИМ подается на электродви- гатель 9, в результате чего эле- ктродвигатель 9 приходит во вращение
to
15
20
5
0
5
0
5
0
5
в нужном направлении и с заданной частотой.
Электродвигатель 9 приводит во вращение тест-объект 2. При этом происходит модуляция пучка излучения коллиматора 1, и, следовательно, поток излучения, прошедщий объективы коллиматора 3 и испытуемой систеии 4, а также анализирующую диафрагму 5 и поступающий на вход приемника 6 излучения, изменяется во времени.
После линейного преобразования модулированного излучения в приемнике 6 излучения в электрический сигнал он поступает на вход узкополосного фильтра 7, где из него выделяется основная гармоническая частота модуляции, которая затем регистрируется .отсчетным прибором 8.
С выхода фильтра 7 сигнал поступает также и на фазовый дискриминатор 22, где происходит сравнение по фазе с импульсами, генерируемыми генератором 13 импульсов стабильной частоты. Фазовый дискриминатор 22 выявляет временное расхождение выходных импульсов фильтра 7 и генератора 3 импульсов стабильной частоты и выдает сигнал, пропорциональный по величине и знаку фазовому сдвигу между указанными импульсами, при одновременном приходе импульсов на входы фазового дискриминатора 22 он вьщает нулевой сигнал.
Из-за наличия вибраций основания приемная часть стенда, включающая анализирующую диафрагму 5 и приемник 6 излучения, перемещается отно- сительно излучающей части, вследствие этих колебаний мгновенная фаза, а следовательно, и мгновенная частота сигнала, поступающего с выхода приемника 6 излучения на узкополосный фильтр 7, непрерывно изменяется пропорционально закону, вибрации.
При изменении фазы импульсов на выходе приемника излучения вследствие вибрационных колебаний эти изменения регистрируются фазовым дискриминатором 22, который и вырабатывает соответствующий сигнал. Этот сигнал, как управляющий, подается на частотный дискриминатор 21, вследствие чего происходит изменение мгновенной частоты вращения электродвигателя 9, причем таким образом,, чтобы мгновенная скорость перемещения изображения растра по анализирующей диафрагме оставалась постоянной и равной тому значению, что и при отсутствии вибраций.. Частота модуляции сигнала на выходе приемника излучения остается постояв- ной и равной начальному значению. Таким образом, благодаря компенсации вибраций основания исключается дополнительная погрешность измерения.
Режим шагового движения диска ну- жен для юстировки стенда и его задачей является фиксация диска в любом ;произвольном угловом положении. Ра- бота устройства в этом режиме про- :исходит следующим образом. Чтобы оста ;новить тест-объект 2 в заданном поло- ;жении, первоначально уменьшают частоту вращения электродвигателя 9 путем уменьшения частоты генератора 2 до ; некоторого минимального значения, при : мерно 0,1 от номинальной частоты I вращения. Далее переводят переключает ель 17 режима остновки в положение Стоп. При этом электродвигатель 9 переходит в режим торможения, останов электродвигателя 9 произойдет в положении, которое находится за требуемым положением. Приведение двигателя в требуемое положение производится с помощью позиционной системы, рабо- та которой основана на использовании оптронного датчика в качестве датч:ика обратной связи.
По команде -Стоп, поступающей от переключателя 17 реяагма остановки, запускается реверсивный счетчик 26 импульсов, на тактовый вход которого поступает сигнал с выхода оптронного датчика 11, а на вход (ожение-вычи- тание поступает информация об истинном направлении вращения двигателя от формирователя 25 истинного направления вращения.
Команда.Стоп поступает также и на вход инвертора 28, выходной сигнал которого подается на один из входов элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 29. На друго вход элемента 29 поступает сигнал с вь1хода элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 33. При этом на выходе элемента 33 мо;кет
иметься логический О
п
истинное направление вращения совпадает с требуемым J в противном случае на выходе элемента 33 имеется логическая 1. Выходной сигнал второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 33, поступая на первый коммутатор 30 через первый элемент ИСКЛЮЧАЮЩЕЕ ИЛИ. 29, отключает от ШИМ 18 частотный дискриминатор 21
и вместо него подключает источник 20 управляющего сигнала. Полярность этого сигнала такова, что двигатель 9 реверсируется, при этом он первоначально переходит в режим торможения, далее останавливается, а затем начинает вращаться в обратном направлении. Вследствие изменения направления вращения двигателя изменяется сигнал на выходе второго эле- мента ИСКЛЮЧАЮЩЕЕ ИЛИ 33 и через первый элемент ИСКЛЮЧАЮШЕЕ ИЛИ 29 с помощью первого коммутатора 30 снова подключается частотный дискриминатор 2 к ШИМ 18. Кроме того, меняется сигнал, поступающий на вход Сложение-вычитание реверсивного счетчика 26. Когда реверсивный счетчик 26 обнуляется, с его выхода подается команда на мажоритарный элемент 27, с выхода которого комгнда подается на элемент ИЛИ 3., откуда сигнал подается на вход ШИМ 1.8 и блокирует его, так что электродвигатель 9 останавливается.
Для работы устройства в пошаговом режиме переключатель 15 режимов работы переводится в положение Шаг. При этом команда от переключателя 15 режимов работы поступает на второй коммутатор 31, который подключает импульсньш дискриминатор 24 к ШИМ 18. Команда от переключателя 15 режимов работы пО Ступает та1сже на элемент ИЛИ 32, который разблокировывает выход ШИМ 18, вследствие чего выход ШИМ соединяется с электродвигателем 9. При подаче от генератора 14 одиночных ишгульсов на импульсный дискриминатор 24 последний вырабатывает напряжение, поступающее на электродвигатель 9 и обеспечивающее его вращение в таком направлении, которое соответствует положению переключателя 1 6 .направления вращения. В таком .режиме цб пь управления двигателем прсдставляет за1« жнутую позиционную систему управления, в которой измерение рассогласования производится импульсным дискриминатором 24, сигнал Зс1давания поступает от генератора 14 одиночных импульсов, а оптронный датчик 11 является позиционным датчиком обратной связи.
На первый вход импульсного дискриминатора 24 поступают импульсы оптронного датчика 11. На второй вход импульсного дискриминатора 24 подаются сигналы от генератора 14 одиночных импульсов. На другие входы дискриминатора 24 поступают сигналы , с формирователя 25 истинного направ- ления вращения, а также с переключателя 16 направления вращения. Выходной сигнал импульсного дискриминатор 24 подается в канал управления электродвигателем 9, который, поворачи- ваясь, отрабатывает заданное число импульсов на генераторе 14 одиночных импульсов.
Таким образом, можно уст ановить вал двигателя в любое положение с точностью, равной угловому шагу опт- ронного датчика.
Формула изобретения
I. Устройство для контроля оптической передаточной функции оптических систем, преимущественно для длинно- фокусных, содержащее коллиматор, в фокальной плоскости которого установлен тест- Объект, выполненный в виде кольцевого радиального растра, нанесенного на вращающийся диск, который установлен на валу электродвигателя, .оптронный датчик, также установлен- ньй на валу электродвигателя, блок управления частотой вращения двигателя , содержащий частотный дискриминатор и широтно-импульсный модулятор, генератор импульсов регулируемой час- тоты, анализирующую диафрагму, установленную в фокальной .плоскости испытуемой оптической системы, приемник излучения, узкополосный электрический (}шльтр и отсчетное устройство, о т - личающееся тем, что, с целью повышения точности контроля, в устройство введены генератор импульсов стабильной частоты; генератор одиночных импульсов, переключатель режимов работы, переключатель направления вращения, переключатель режима остановки, а в блок управления введен блок переключения, источник постоянного управляющего сигнала, фазовый дискриминатор, вспомогательный частотный дискриминатор, импульсный дискриминатор, формирователь истинного направления вращения, при этом выходы переключателя режимов работы, пере- ключателя направления вращения, переключателя режимов, остановки,: источника постоянного управляющего сигнала и частотного дискриминатора подклю10
5
0
5 0 5 0 5 Q j
,чены к входам переключающего устройства, а выход переключающего устройства через широтно -импульсный модулятор соединен с входом двигателя, один из входов частотного дискриминатора соединен с выходом генератора регулируемой частоты, второй вход частотного дискриминатора соединен с выходом оптронного датчика, третий вход частотного дискриминатора соединен с выходом вспомогательного частотного дискриминатора, вход которого соединен с выходом генератора регулируемой частоты, четвертый вход частотного дискриминатора соединен с выходом фазового дискриминатора, один из входов фазового дискриминатора соединен с выходом генератора стабильной частоты, а другой его вход соединен с выходом узкополосного электрического фильтра, один из входов импульсного дискриминатора соединен с выходом генератора одиночных импульсов, а его другой вход соединен с выходок оптрон- ного датчика, третий его вход соединен с выходом формирователя истинного направления, вращения, а четвертый его вход соединен с переключателем направления вращения; вход формирователя истинного направления вращения соединен с выходом оптронного датчика. 2. Устройство по п. 1, о т л и - чающееся тем, что переключающее устройство содержит реверсивньй счетчик, мажоритарный элемент, инвертор, элемент ИЛИ, два элемента ИСКЛЮ- . ЧАЮЩЕЕ ИЛИ, два ко}у мутатора, при этом счетный вход реверсивного счетчика соединен с выходом оптронного датчика, вход реверсивного счетчика, Сложение-вычитание соединен с выходом формирователя.истинного направления вра-. щения, а установочный вход соединен с переключателем режима остановки,первый вход мажоритарного элемента соеди- . нен с выходок реверсивного счетчика,его второй вход соединен с выходом переключателя режима остановки, третий вход соедлнен с его же выходом, а выход мажоритарного элемента соединен с входом элемента ИЛИ, второй вход элемента ИЛИ соединен с цереключателем режимов работы, выход которого соединен с одним из входом щиротно-импульс- ного модулятора, вход инвертора соединен с выходом переключателя режима остановки, а выход инвертора соединен с. одним из входов первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого соединен с управляющим входом первого коммутатора, первый сигнальный вход этого коммутатора соединен с выходом частотного дискриминатора, а второй сигнальный вход соединен с выходом источника постоянного управляющего сигнала, выход первого коммутатора соединен с первым сигнальным входом втоН рого коммутатора, а второй сигнальный вход второго коммутатора соединен с выходом импульсного дискриминатора,,
выход второго коммутатора соединен-с входом широтно-импульсного модулято- ра, а управляющий вход второго коммутатора соединен с переключателем режимов работы, второй вход первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ соединен с выходом второго элемента ИСКЛЮЧАЮЦ ЕЕ ИЛИ, один из входов второго элемента ИСКЛЮЧАЮЩЕЕ ИЖ соединен с переключателем направления вращения, а другой вход - с выходом Формирователя истинного направления вращения.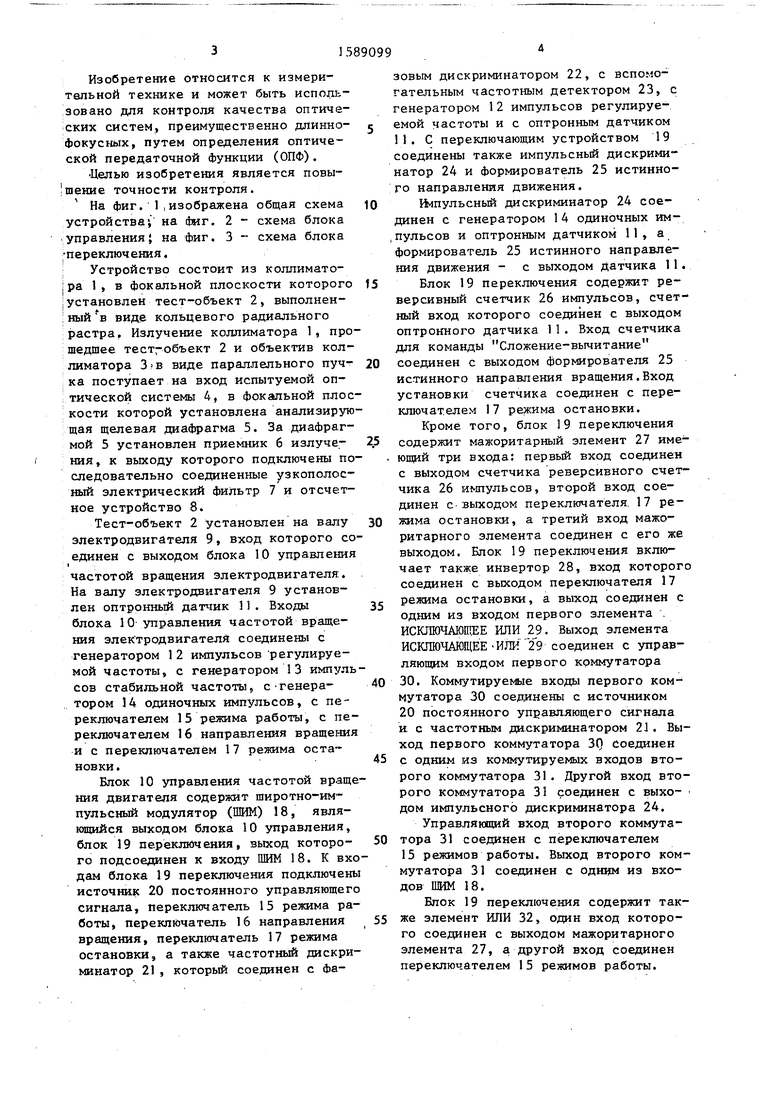



| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНАЯ ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342762C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2202147C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| Вентильный электропривод | 1991 |
|
SU1829101A1 |
| Электропривод постоянного тока | 1985 |
|
SU1272452A1 |
| Электропривод постоянного тока | 1978 |
|
SU771834A1 |
| Синхронизируемый вентильный электродвигатель | 1985 |
|
SU1317581A1 |
| ИСТОЧНИК СТАБИЛЬНОГО ТОКА | 2013 |
|
RU2523916C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
Изобретение относится к измерительной технике и может быть использовано для контроля качества оптических систем, преимущественно длиннофокусных, путем определения оптической передаточной функции. Целью изобретения является повышение точности контроля. Излучение, прошедшее тест-объект 2 и объектив коллиматора 3, попадает на испытуемый объектив 4, в фокальной плоскости которого находится анализирующая щель 5 и фотоприемное устройство 6. Блок 10 управления позволяет исключить из результатов измерения влияние вибрации основания устройства и обеспечивает режим шагового движения тест-объекта 2, необходимого для юстировки устройства. 1 з.п. ф-лы, 3 ил.
Фиг.2
Фиг.д
| 1972 |
|
SU415536A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
