фиг. Изобретение относится к машиностроению, в частности к центробежной обработке. Известно устройство для центробежной абразивной обработки, содержащее платформу, по крайней мере с одним контейнером, связанную с кривощипно-шатунным механизмом посредством пальцев 1. Недостатком этого устройства является то, что центробежная сила остается постоян -.-- -- ....v.,.A. НОИ в течение всего периода обработки, что приводит к образованию в контейнерах застойных зон в массе загрузки, что не позволяет повысить производительность процесса. Цель изобретения - повышение производительности обработки. Указанная цель достигается тем, что в устройстве для центробежной абразивной обработки, содержащем платформу по крайней мере с одним контейнером, связанную с кривошипно-шатунным механизмом посредством пальцев, платформа выполнена с параллельными пазами а пальцы установлены в пазах с возможностью перемещения. На фиг. 1 схематично представлено устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - схема относительного расположения пальца кривошипа в пазу платформы за период одного оборота кривощипа. Устройство состоит из платформы 1 с жестко установленными на ней контейнес, г-г ,т- ..4,.i..v, рами 2. Илатфор ма 1 опирается На связанII .TO 114 ом/ .M ftrTtTi tf fttfi тггхгтГ-к-tiTTii ные между собой кинематически кривошипы 3, установленные параллельно друг другу при этом один из кривошипов связан с приводом вращения (не показан). Пальцы 4 кривошипов 3 установлены в параллельных пазах 5 платформы 1. Устройство работает следующим образом. При одновременном вращении кривошипов 3 вокруг своих осей (вращение кривошипов происходит в одинаковых фазах) 72 платформа 1 вместе с закрепленными на ней контейнерами соверщает поступательное движение по криволинейной траектории, которая складывается из кругового движения кривошипов и поступательного движения платформы с пазами относительно пальцев кривошипов. Кривошип при повороте относительно центра вращения О (рис. 4) из положения I -,п- - г .-.-, v jiv. ж ti Jifi jfi neifi i в положение II увлекает за собой платформу по круговой траектории радиуса г. Платформа, кроме того, получает дополнительное движение вдоль оси х за счет перемещения в пазах под действием сил инерции. В положении II палец кривошипа, переместившись в пазу, достигает другого его конца и движение платформы вдоль оси X прекращается. Перемещаясь из положения II в положение III, .кривошип увлекает за собой платформу, которая на этом участке движется по круговой траектории радиуса г. Движение платформы на участках III-IV и IV-I соответствует зеркально отраженному движению на участках I-II и П-III, соответственно. Таким образом, замкнутая траектория движения платформы с контейнерами для представленной на фиг. 4 длины паза сосоит из двух круговых участков - II-III и IV-I, радиуса г, и двух криволинейных - I-II и III-IV, отличающихся от дуги окружности. Такую траекторию движения имеf j i4iw.iri. lanynj i JcicMU jMio имет каждая точка платформы и контейнеров Г - .. то следует из природы поступательного вижения. При этом загруженные в конейнеры детали и абразивная среда соверают относительное перемещение, двигаясь омпактной, но -пересыпающейся массой доль стенок контейнеров, что обеспечиват обработку. Таким образом, предлагаемое устройсто позволяет повысить производительностьбработки.
рг/г. 2
ф1/г.З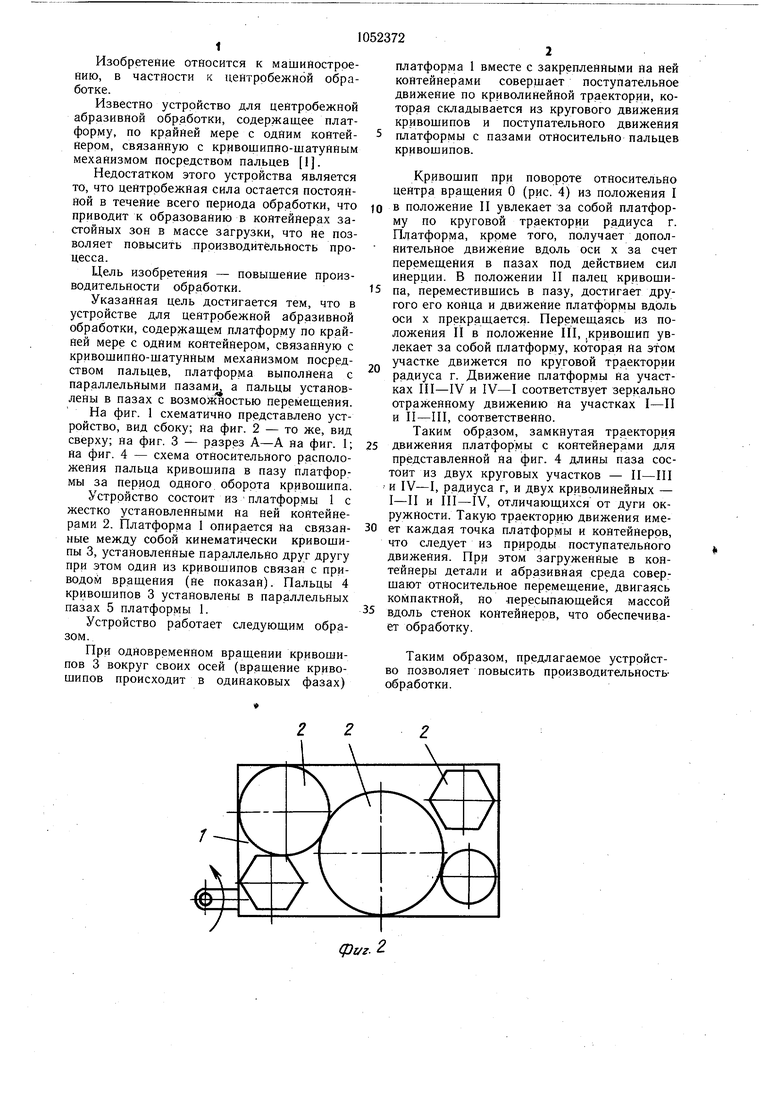
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для центробежной абразивной обработки | 1987 |
|
SU1495083A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ФРЕЗЕРНЫЙ СТАНОК | 1994 |
|
RU2082602C1 |
| Устройство для обработки деталей | 1981 |
|
SU1065162A1 |
| Вибратор маятниковый универсальный для электрохимической обработки | 2020 |
|
RU2761925C1 |
| Стенд для калибровки и испытаний датчиков параметров движения | 2023 |
|
RU2818234C1 |
| Способ создания три и "3+" тактных поршневых ДВС с видоизмененным кривошипно-шатунным механизмом и осуществление способа. | 2013 |
|
RU2618640C2 |
| Планетарно-кривошипный механизм возвратно-поступательного движения | 1983 |
|
SU1130711A1 |
| УСТРОЙСТВО для ОБРАБОТКИ ПЛОСКОСТЕЙ | 1970 |
|
SU269733A1 |
| СПОСОБ ДОБЫЧИ НЕФТИ С ИСПОЛЬЗОВАНИЕМ ШТАНГОВОГО ГЛУБИННОГО НАСОСА И СТАНОК-КАЧАЛКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2381383C1 |

УСТРОЙСТВО ДЛЯ ЦЕНТРОБЕЖНОЙ АБРАЗИВНОЙ ОБРАБОТКИ, содержащее платформу по крайней мере с одним контейнером, связанную с кривошипно-шатунным механизмом посредством пальцев, отличающееся тем, что, с целью повышения производительности, платформа выполнена с параллельными пазами, а пальцы установлены в пазах с возможностью перемещения.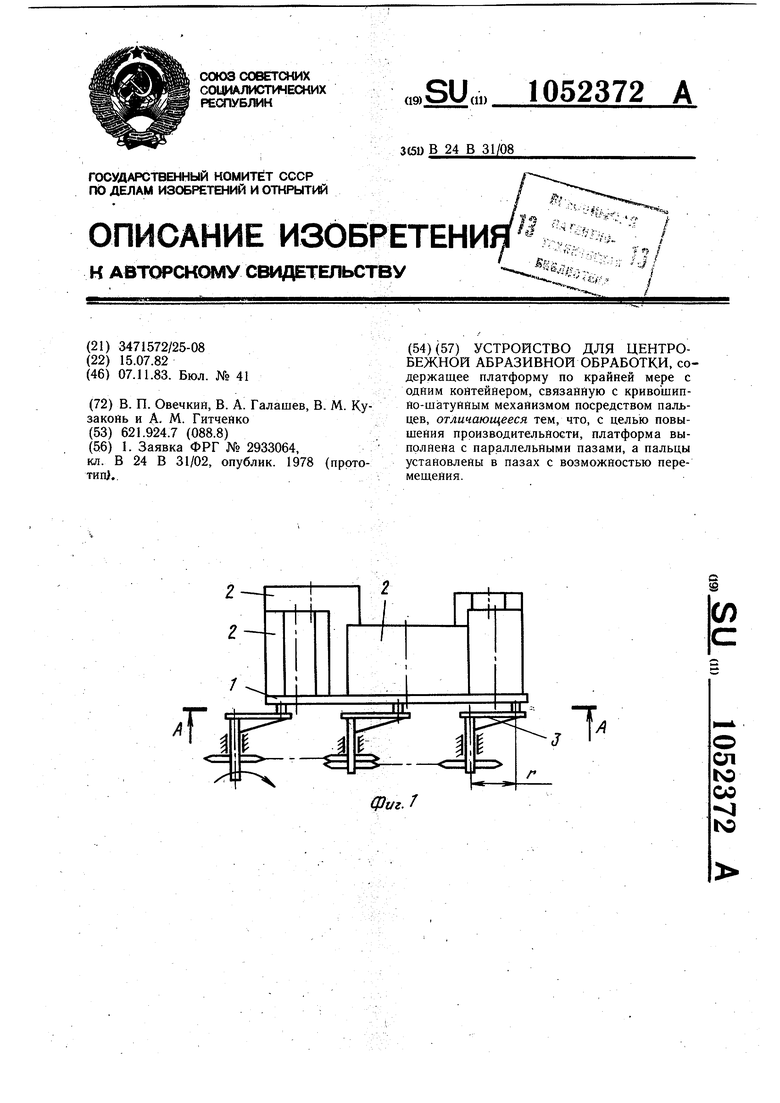
Tpae/f/r7o/}t/ г
effuA /{pt/Sou/i/na
TpaeK/J7O/jifjf
.j/ 7 C/77U ff/77 A/ ffiff
y i/jffe i/jt i//yfffoVVJT e/fAffc/rfeu
/7 Cf/f7 O/)/fl,f
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Заявка ФРГ № 2933064, кл | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
