Изобретение относится к измерительиой технике и может быть испольэовано при определении угла отклонения от горизонтальной плоскости элементов конструкций, пр.и сборочных работах и монтаже оборудования в строительстве и ТоДо
Известны зстройства для измерения углаотклонения от горизонтальной плоскости с помощью маятника, в которые: груз подвешен шаряирно яа некотором рчасстояник от оси вращения, связанной с основаниеМр н величина отклонения маятника от среднего положения дает информацию о5 отклокенин основания от гориэонталькой плоскости ll,
Однако крутизна преобразования -измеряемой величины в угол отклоне5.-iHH маятника неизменна и всегда равна единрще,, что является недостатком маятниковык наклономеров.
Известна подвеска маятника, обеспечивающая левитацию всех подвижных частей, что полностью исключает сухое трение и существенно повышает точность измерений С21,
Однако подвеска маятника не создает нового эффекта.
Наиболее близким по технической сущности к предлагаемому является устройство для измерения угла отклонения от горизонтальной плоскости, в котором левитирующий маятник выполнен в виде кольца,, размещенного исходно под углом к горизонталной плоскостир а центр тяжести кольца смещен от центра его враш.енияо При наклоне вокруг направления, параллельного радиусу кольца на котором расположен центр тяжести, кольцо разворачивается., причем угол поворота можно пол чить значительно большер чем измеряемый наклон, Для дистанционной передачи данных на кольце размещен подвижный элемен безреактивного датчика перемещений, сигнал которого можно использовать в показывающих или регистрирующих приборах 3 3,
Недостаток известного устройства заключается в том что положением центра тяжести кольца нельзя управлять дистанционно,, а слеловательно, крутизна преобразования измеряемой величиныs B угол поворота кольца для конкретного прибора является нерегулируемой величиной Кроме того, время успокоения колебаний .кольца, т.е, промежуток от момента отклонения на измеряемый угол до остановки кольца, и период колебаний кольца являлотся также неуправляемыми величинами, так как определяются моментом инерции кольца и его Бязкш/1 взаимодействием с систолой подвески и окружающим газом Поэтому из.вес7:ны 4 устройством практически можно из.мерять лишь относительно большие углы отклонения от горизонтальной плоскости, когда колебательная скорост.ь кольца достаточно велика.
Цель изобретения - обеспечение воэможностк диста.нционно управлять динамическими .пара -1етрами и крутизной преобразования измеряемой величины в отклонении маятника„
указанная цель достигаете. тем, что устройство для измерения yrjia отклонения от горизонтальной плоскостиf содержащее уровень с системой подвес.ки левитирующего маятника с одной степенью свободы с ломещеннь1Г-4 на нем подвижны1,1 злементом датчика перемещений связанного с отсчетным блоком, источник постоянного тока, снабжено усилителями и дифференцирующими блоками,левитирующий маятник уровня выполнен в виде плоской рамки р на которо закреплен ферромагнитный сердечник а над маятником помещен многообмоточный электромагнит, причем центры масс ра.мки и ферромагнитного сердечника совпадают, полюса электроманита расположены симгутетрично относительно поперечной оси симме.трии системы подвески, одна из обмоток электромагнита соединена с выходом источника постоянного тока другая подключена к выкоду первого усилителя на входе которого включен первый дифференцир тощий блок, связанньзй с датчиком перемещенийf а третья обмотка соединена с выходом зторого усилителя, на входе которого агорой дифференцирующий блок, связанный с выходом первого диффер гнцирующего блока.
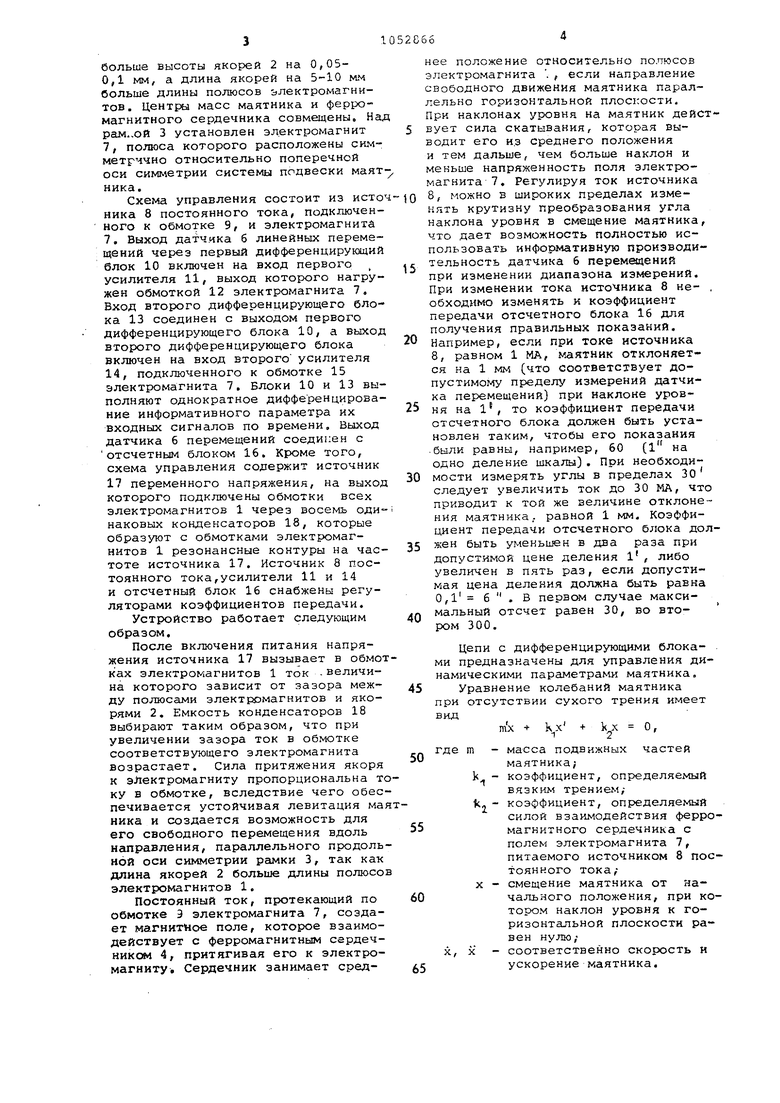
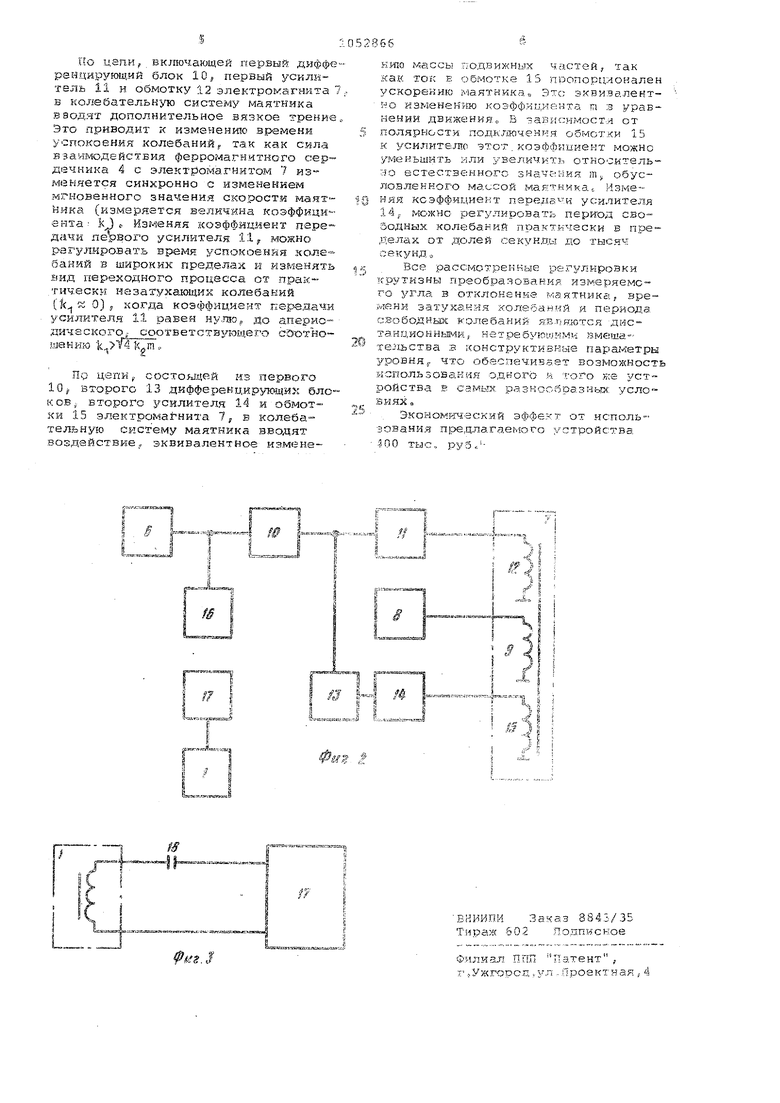
На фиг,, 1 схематически представлена конструкция уровня устройства для измерения угла отклонения от горизонтальной плоскости,- на фиг с. 2 ахема соединения блоков; на фиг. 3 схема подключения одного из электромагнитов скстемы подвески маятн ик а
Устройство для измерения угла отклонения от горизонтальной плоскости состоит из уровня и схемь управления.
Уровень содержит систедму подвески, маятннк и электроглагнит, Система подвески предназначена для обес.печения лев.итацин маятника с одной степенью свободы - ликейныг пэреме - щением. Восемь одинаковых злектромагнитоз 1 размеще.ны по четыре сверку и снизу от якорей 2, закре.пленны в одноП плоскости на рамке 3 маятника., на которой помешены также феферромагнитн:ый сердечник 4 и подвижный элемент 5 датчика 6 линейных перемещений.. Расстояние между прогмвоположными MarKHTa v;.K 1 выбрано больше высоты якорей 2 на О, ОБОД мм, а длина якорей на 5-10 мм больше длины полюсов электромагнитов. Центры масо маятника и ферромагнитного сердечника совмещены. На рам..ой 3 установлен электромагнит 7/ полюса которого расположены симметгччно относительно поперечной оси симметрии системы подвески мая ника. Схема управления состоит из исто ника 8 постоянного тока, подключен ного к обмотке 9, и электромагнита 7. Выход датчика 6 линейных перемещений через первый дифференцирующи блок 10 включен на вход первого , усилителя 11, выход которого нагру жен обмоткой 12 электромагнита 7, Вход второго дифференцирующего бло ка 13 соединен с выходом первого дифференцирующего блока 10, а выход второго дифференцирующего блока включен на вход второго усилителя 14, подключенного к обмотке 15 электромагнита 7, Блоки 10 и 13 вы полняют однократное дифференцирова ние информативного параметра их входных сигналов по времени. Выход датчика 6 перемещений соединен с отсчетным блоком 16. Кроме того, схема управления содержит источник 17 переменного напряжения, на выхо которого подключены обмотки всех электромагнитов 1 через восемь оди наковых конденсаторов 18, которые образуют с обмотками электромагнитов 1 резонансные контуры на час тоте источника 17. Источник 8 постоянного тока,усилители 11 и 14 и отсчетный блок 16 снабжены регуляторами коэффициентов передачи. Устройство работает следующим образом. После включения питания напряжения источника 17 вызывает в обмо ках электромагнитов 1 ток - величина которого зависит от зазора между полюсами электромагнитов и якорями 2. Емкость конденсаторов 18 выбирают таким образом, что при увеличении зазора ток в обмотке соответствующего электромагнита возрастает. Сила притяжения якоря к электромагниту пропорциональна т ку в обмотке, вследствие чего обес печивается устойчивая левитация ма ника и создается возможность для его свободного перемещения вдоль направления, параллельного продоль ной оси симметрии рамки 3, так как длина якорей 2 больше длины полюсо электромагнитов 1. Постоянный ток, протекающий по обмотке Э электромагнита 7, создает магнитное поле, которое взаимодействует с ферромагнитным сердечнике 4, притягивая его к электромагниту. Сердечник занимает средее положение относительно полюсов лектромагнита . , если направление вободного движения маятника паралельно горизонтальной плоскости. ри наклонах уровня на маятник действует сила скатывания, которая выодит его и.з среднего положения и тем Дальше, чем больше наклон и меньше напряженность поля электромагнита 7. Регулируя ток источника 8, можно в широких пределах изменять крутизну преобразования угла наклона уровня в смещение маятника, что дает возможность полностью использовать информативную производительность датчика 6 перемещения при изменении диапазона измерений. При изменении тока источника 8 не- , обходимо изменять и коэффициент передачи отсчетного блока 16 для получения правильных показаний. Например, если при токе источника 8, равном 1 МА, маятник отклоняется на 1 мм (что соответствует допустимому пределу измерений датчика перемещений) при наклоне уровня на 1, то коэффициент передачи отсчетного блока должен быть установлен таким, чтобы его показания были равны, например, 60 (l на одно деление шкалы). При необходимости измерять углы в пределах 30 следует увеличить ток до 30 МА, что приводит к той же величине отклонения маятника, равной 1 мм. Коэффициент передачи отсчетного блока должен быть уменьшен в два раза при допустимой цене деления 1 , либо увеличен в пять раз, если допустимая цена деления должна быть равна 0,1 6 . В первом случае максимальный отсчет равен 3D, во втором 300. Цепи с дифференцирующими блоками предназначены для управления динамическими параметрами маятника. Уравнение колебаний маятника при отсутствии сухого трения имеет вид О, где m - масса подвижных частей маятника; k - коэффициент, определяемый вязким трением,коэффициент, определяемый силой взаимодействия ферромагнитного сердечника с полем электромагнита 7, питаемого источником 8 постоянного тока,X - смещение маятника от начального положения, при котором наклон уровня к горизонтальной плоскости равен нулю/ X, х - соответственно скорость и ускорение маятника.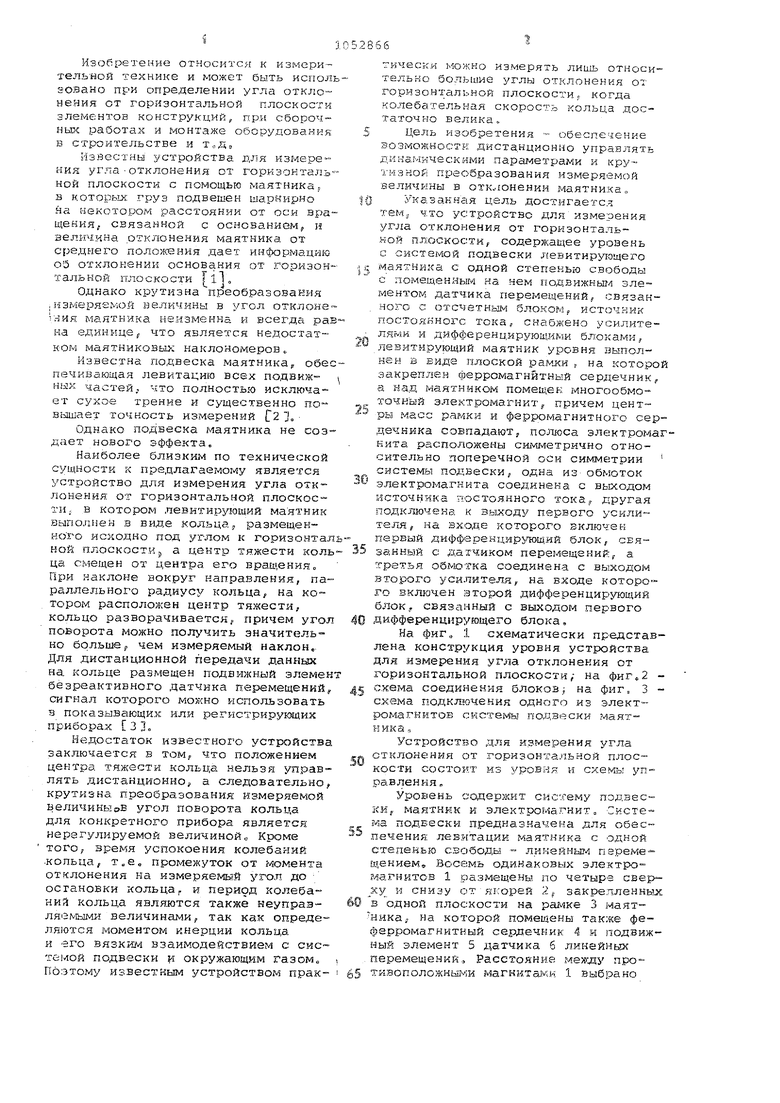
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения угла отклонения объекта от горизонтальной плоскости | 1982 |
|
SU1052865A1 |
| УРОВЕНЬ | 1973 |
|
SU372437A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС | 2023 |
|
RU2816409C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
| Трехкомпонентные магнитоэлектрические весы | 1975 |
|
SU524977A1 |
| МАЯТНИКОВЫЙ ГИРОКОМПАС | 1991 |
|
RU2046288C1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU855580A1 |
| МНОГОПРЕДЕЛЬНЫЕ РЕГИСТРИРУЮЩИЕ ВЕСЫ | 1969 |
|
SU241042A1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1982 |
|
SU1044980A2 |
УСТРОЙСТВО ДЗШ ИЗМЕРЕНИЯ УГЛА ОТКЛОНЕНИЯ ОТ ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ, содержащее уровень с сйсте зй подвески левитирующего маятника с одной степенью свободы с помещенным на нем ПОДЕИЖНЫМ эле- ментом датчика перемещений, связанного с отсчетным блоком, источник постоянного тока, отличающееся тем, что, с целью дистанционного управления динамическими параметрами и крутизной преобразования измеряемой величины в ст {лонении маятника, оно снабжено усилителями и дифференцирующими блоками, левитирующий маятник уровня выполнен в виде плоской рамки, на которой закреплен ферромагнитный сердечник, а над маятником помещен многообмоточный электромагнит, причем центры масс рамки и ферромагнитного сердечника совпадают, полюса электромагнита расположены симметрично относительно поперечной оси симметрии сисTeNfoi подвески, одна из обмоток электромагнита соединена с ЕЬЖОДОМ источника постонного тока, другая подклкэчена к выходу первого усилителя, на входе которого включен первый дифференцирующий блок, связанный с датчиком перемещений, а третья обмотка соединена с выходом второго усилителя, на входе которого включен второй дифференцирующий блок, связанный с выходом перво го дифференцирующего блока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
