Известны гироскопические инклинометры для съемки скважин, состоящие из блока измерителей зенитного угла, азимутального устройства и .принимающего дистанционного устройства на поверхности.
Предложенный инклинометр отличается тем, что каждый из двух измерителей зенитного угла и соответствующий ему принимающий элемент устройства на поверхности выполнены в виде идентичных электромагнитов компенсационного типа, причем оба принимающих элемента устройства на поверхности смонтированы в отдельном блоке, один конец которого закреплен в кардановом подвесе, перемещающемся по вертикальным направляющим, а другой - в шаровом шарнире, перемещающемся в горизонтальной плоскости.
Такое выполнение устройства обеспечивает повышение точности измерений инклинометра.
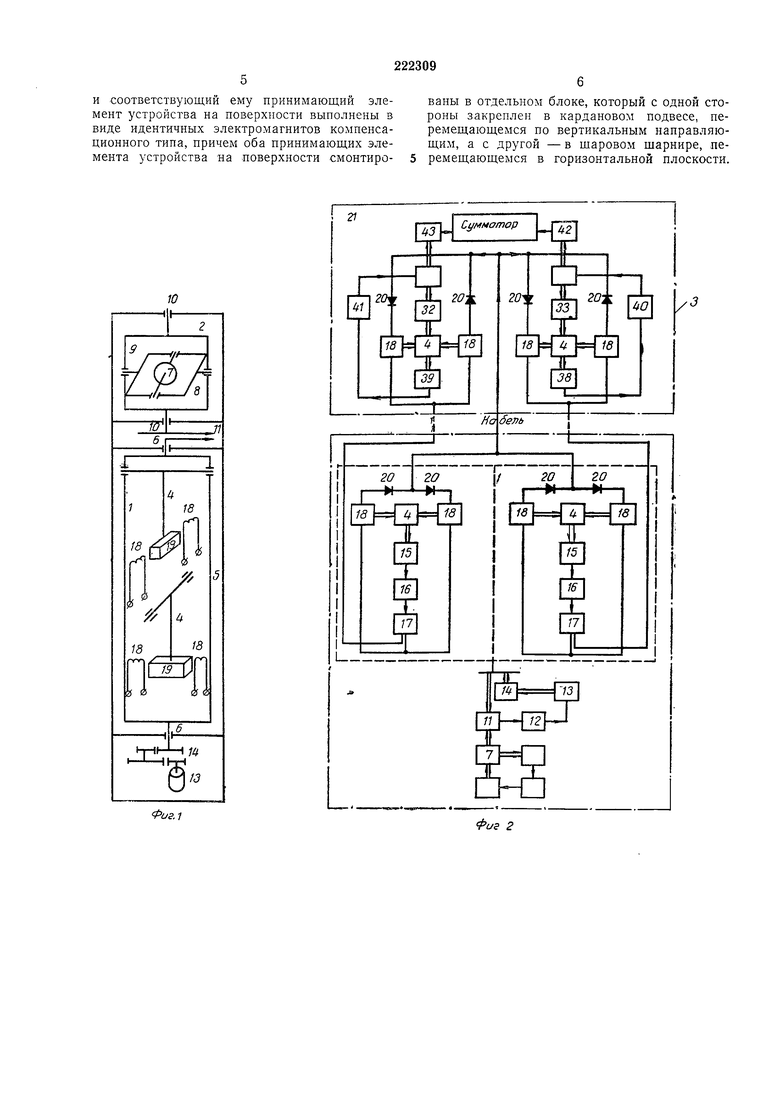
Предлагаемое устройство состоит из трех основных частей: блока 1 измерителей зенитного угла, гироскопического азимутального устройства 2 и наружного корпуса 3 приемного устройства.
Блок 1 измерителей зенитного угла состоит из двух маятников 4, оси которых взаимно перпендикулярны, так что маятники измеряют составляющие зенитного угла в двух взаимно перпендикулярных плоскостях. Оси подвеса обоих маятников жестко закреплены в одном блоке, корпус 5 которого может свободно вращаться по оси инклинометра, так как установлен на шарикоподшипниках 5. Корпус
блока измерителей стабилизируется в азимуте следящей системой, работающей от азимутального гироскопического устройства 2 так, что плоскости, в которых происходит измерение составляющих зенитного угла, в азимуте
стабилизированы.
Азимутальное гироскопическое устройство может иметь любой принцип действия. На фиг. 1 оно представлено в виде свободного гироскопа с ротором 7, внутренней рамкой 8
и наружной рамкой 9. Последняя помещена в шарикоподшипники 10 и снабжена датчиком отклонений // следящей системы блока 1 измерителей зенитного угла, работающей через усилитель 12 (фиг. 2) на двигатель 13 с редуктором 14.
Маятники 4 снабжены автокомпенсационными электромагнитными устройствами, состоящими из датчиков 15 отклонений маятника от оси инклинометра (но не от вертикапрямителем 17 и компенсационных электромагнитов 18.
При отклонении скважины от вертикали маятники 4 отклоняются от оси инклинометра, датчик 15 отклонений вырабатывает переменное напряжение, которое усиливается в усилителе 16 и преобразуется в постояннный ток в выпрямителе 17. Этот ток поступает в обмотки компенсационных электромагнитов 18, в результате чего под воздействием магнитного поля железный якорь 19 маятника втягивается в катушку и вновь устанавливается в положение вдоль оси инклинометра. Мерой угла наклона является сила тока в катушках компенсационных электромагнитов 18. Для того, чтобы ток попадал именно в обмотку электромагнита, которая вызывает возвращение маятника к оси симметрии, в выходные цепи выпрямителей 17 включены выпрямительные элементы (детекторы) 20 (фиг. 2), направляющие ток в ту или иную катушку, в зависимости от знака напряжения. Знак выходного постоянства напряжения управляется знаком фазы входного сигнала, поступающего от датчика 15 отклонений.
Для дистанционной передачи из инклинометра на поверхность используется тот же компенсационный ток, который, проходя через обмотки компенсационных электромагнитов измерителей сквалсинного прибора, поступает далее через трехжильный кабель в обмотки электромагнитов /5 повторителей зенитного угла. Обмотки имеют точно такие же параметры, как и в скважинном приборе, однако в данном случае являются не компенсационными, а отклоняющими.
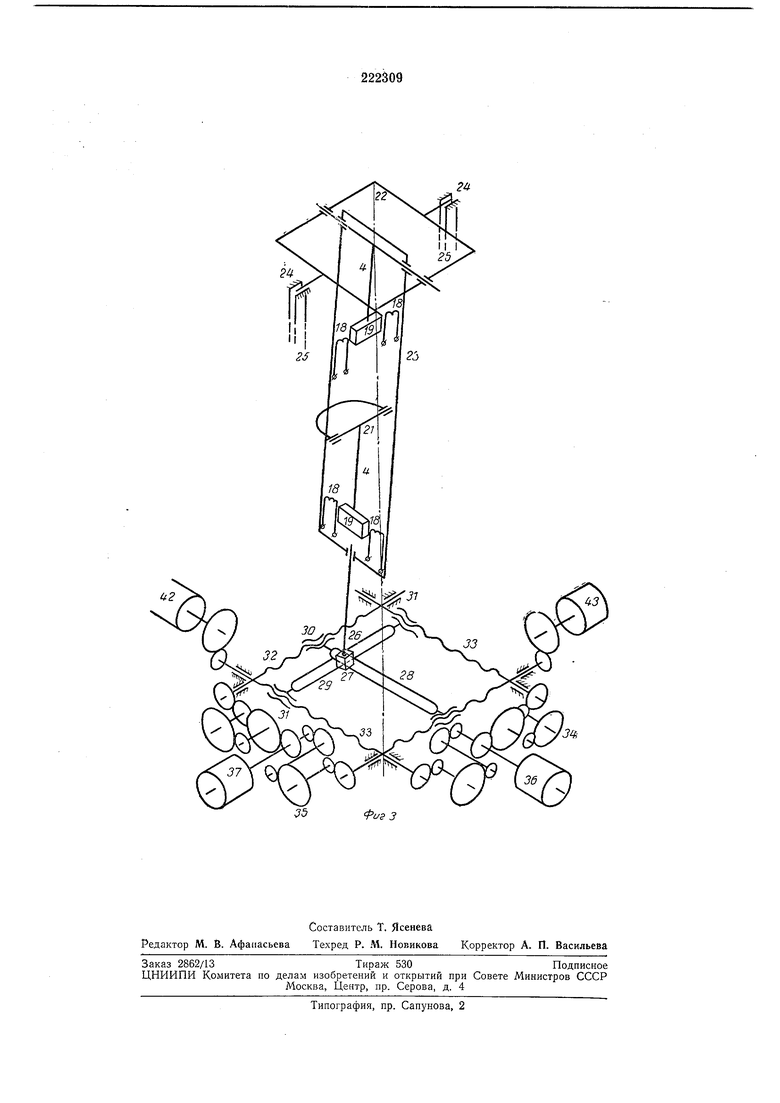
Приемное устройство (фиг. 2 и 3) состоит из блока 21 повторителей зенитного угла, кольца 22 карданового подвеса блока, двух однотипных принимающих следящих систем пространственной установки блока и датчиков. Блок 21 повторителей зенитного угла как и блок 1 измерителей зенитного угла состоит из двух точно таких же маятников 4, оси подвеса которых также развернуты па 90° одна относительно другой. Верхняя часть корпуса 23 блока повторителей подвешена в кардановом подвесе на кольце 22, причем опоры 24 кольца 22 всегда располагаются на горизонтальной оси с возможностью свободного перемещения в вертикальных пазах. 25. Оси подвеса маятников повторителей располагаются относительно наружной оси кольца 22 соответственно расположению осей подвеса маятников измерителей относительно оси гироскопа. На нижнем конце корпуса 23 находится шаровой шарнир 26, например в виде шарнирного подшипника, с кареткой 27, скользящей по двум взаимно перпендикулярным направляющим 28 и 29. Эти направляющие могут перемещаться по взаимно перпендикулярным направлениям гайками 30 и 31 ари помощи спаренных ходовых винтов 32 и ,3. Ходовые винты через редукторы 34 и 35 приводятся во вращение двигателями 36 и 37,
являющимися исполнительными двигателями следящих систем, которые управляются соответственно от датчиков рассогласования 38 и 39 через усилители 40 и 41. Одновременно с ходовыми винтами вращаются датчики 42 и 43 - вращающиеся трансформаторы для сумматора.
Работа устройства происходит следующим образом.
При движении инклинометра по скважине корпус инклинометра получает наклон, соответствующий зенитному углу скважины в точке измерения. Замеры происходят без остановок прибора. При этом на маятники измерителей зенитного угла, отклоняющиеся от оси симметрии под действием силы тяжести, начинают действовать усилия от систем электромагнитной автокомпенсации, удерживающие эти маятники в положении вдоль оси
инклинометра. Например, нижний маятник 4 блока измерителей / (фиг. 1), отклонившись вправо относительно оси инклинометра в результате наклона инклинометра влево (если в плоскости фиг. 1 инклинометр повернулся по часовой стрелке), вызывает в датчике 15 переменное напряжение.
Это напряжение усиливается в усилителе 16 и выпрямляется в фазочувствительном выпрямителе 17, после чего в зависимости от знака поступающей фазы от датчика 15, через детектор 20 попадает в соответствующий электромагнит, в данном случае - в левый электромагнит 18. Под действием электромагпита маятник удерживается по оси инклинометра с некоторой ошибкой, вызываемой статизмом данной системы регулирования; при наличии достаточной крутизны эта ошибка практически пренебрежимо мала.
Ток, проходящий через левую обмотку компенсационного электромагнита, идет далее по кабелю и через разделительный дроссель поступает в левую обмотку электромагнита 18 нижнего маятника 4 блока 21 повторителей. В этом блоке электромагнит играет роль отклоняющей системы. Маятник под действием катушки отклоняется влево от вертикали, на выходной обмотке датчика 38 появляется управляющее напряжение, которое
через усилитель 40 воздействует на следящий двигатель 36. Этот двигатель через редуктор 34 вращает ходовые винты направляющих 29, которые, перемещая каретку 27 с щарниром 26 влево, вызывают наклон блока повторителей на такой же угол, что и инклинометр.
Предмет изобретения
Гироскопический инклинометр, состоящий из блока измерителей занитного угла, азимутального устройства и принимающего устройства на поверхности, отличающийся тем, что, с целью повышения точности измерений, и соответствующий ему принимающий элемент устройства на поверхности выполнены в виде идентичных электромагнитов компенсационного типа, причем оба принимающих элемента устройства на поверхности смонтиро- 5 ваны в отдельном блоке, который с одной стороны закреплен в кардановом подвесе, перемещающемся по вертикальным направляющим, а с другой - в щаровом шарнире перемещающемся в горизонтальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| Инклинометр | 1976 |
|
SU868056A1 |
/
18
I- -IM-IW
м«
Фигл
Фи5 2
г-
Фиг 3
