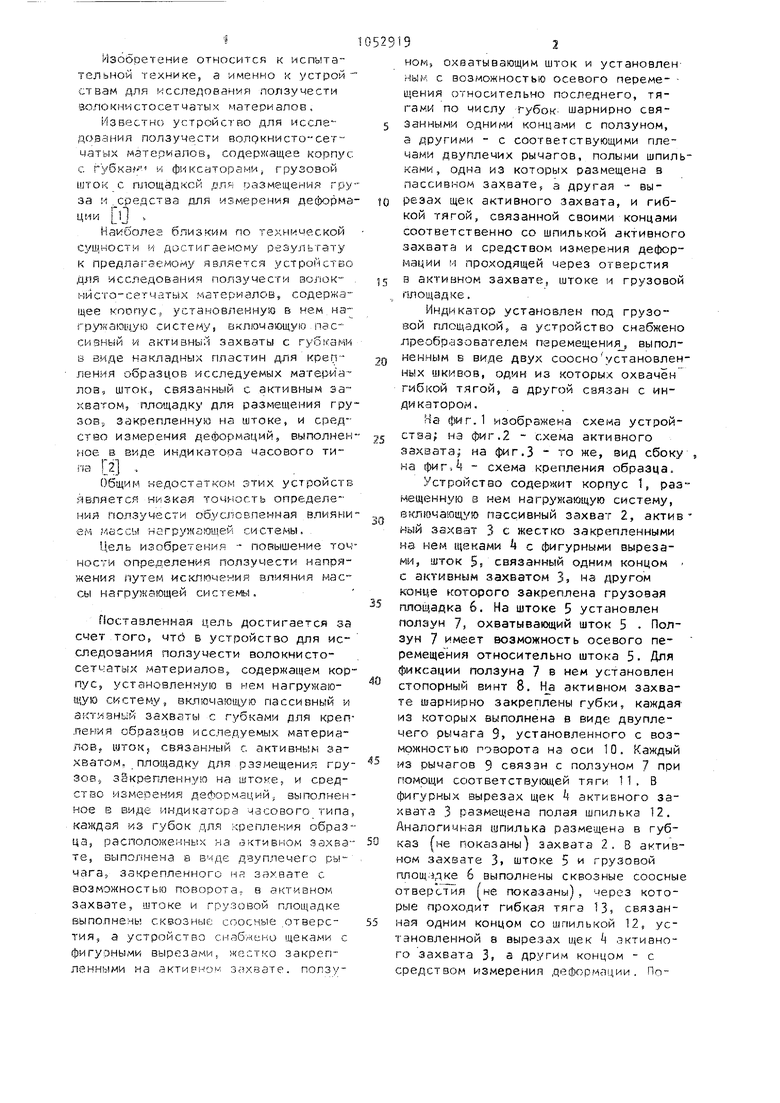
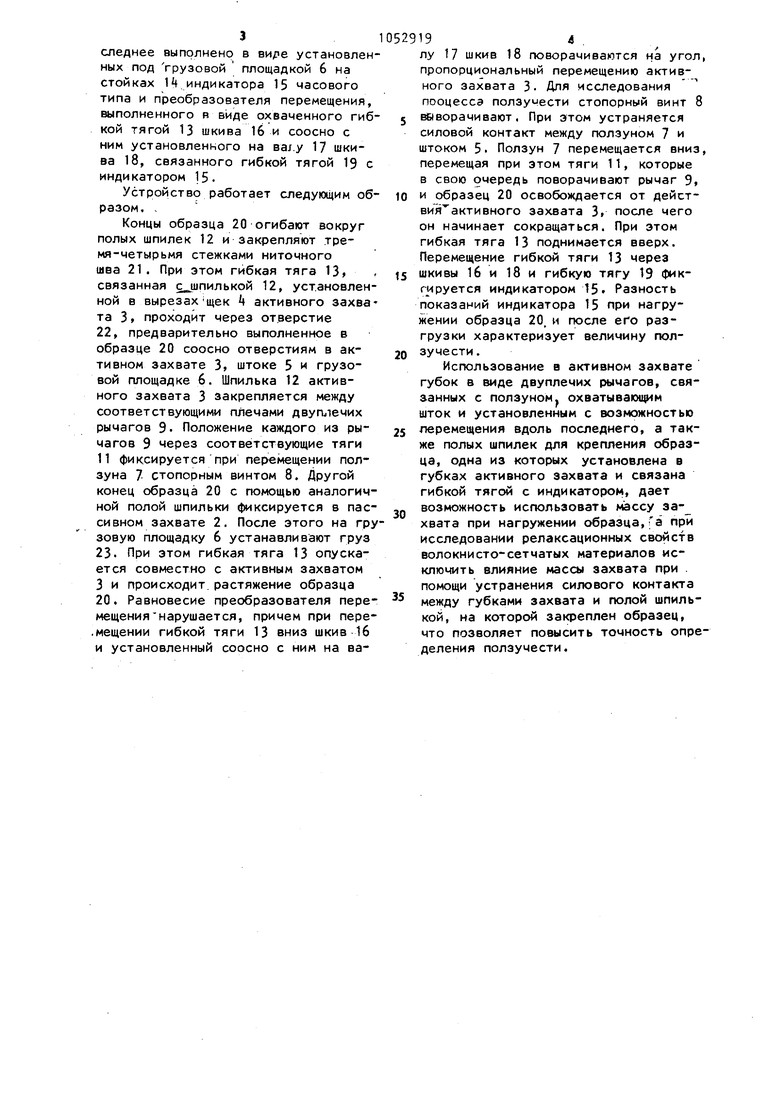
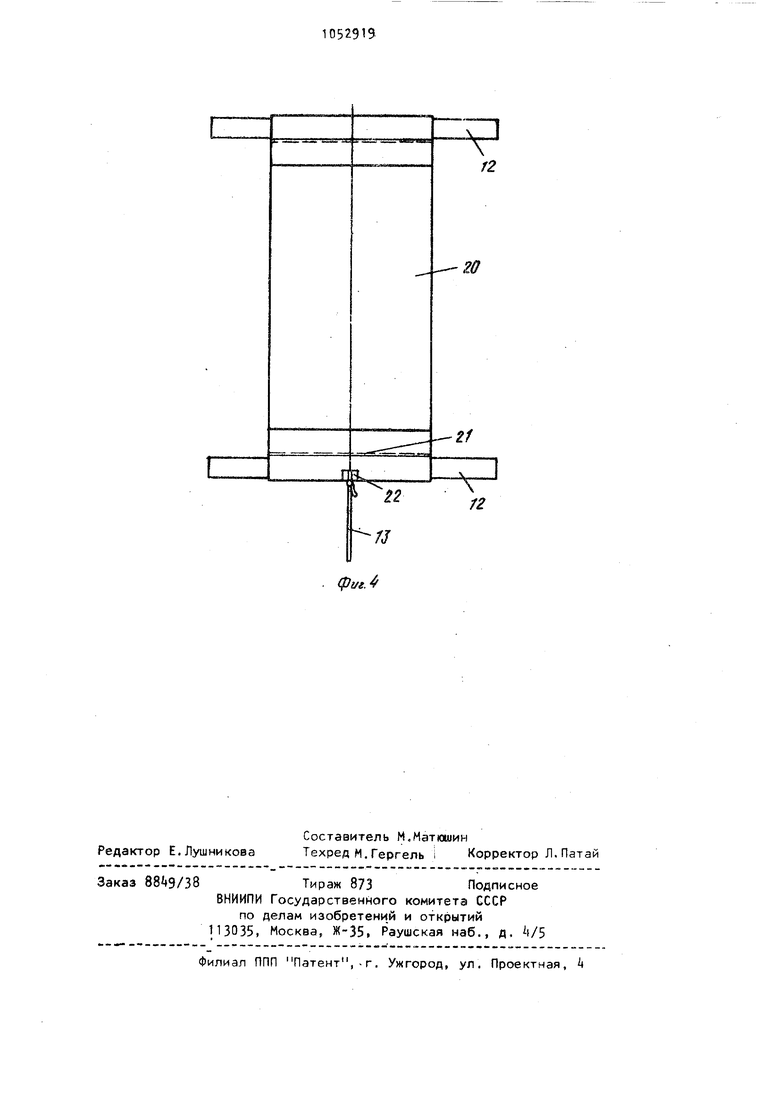
Изобретение OTHOCHTCR к испытательной TexHHKej а именно к устройствам для исследования ползучести золокнистосетчзтых материалов. Известно устройство для исследования ползучести волокнисто-сетчатых материалов, содержащее корпус с губка и фиксаторами, грузовой шток с площадкой для размещения гру за м. средства для 1/ Змерен -1я деформа ции М1 ь Наиболее близким по технимеской сущности и достигаемому результату к предлагаег ому является устройство для исследования ползучести волоккйСТО сетчатых материалов, содержащее коопус, установленную в нем нагружающую систему, включающую пассивный и активный захваты с губками в виде накладных пластин для крепления образцов исследуемых материа лов, шток,, связанный с активным за хзатоМг площадку для размещения гру зов, закрепленную на штоке, и средство измереиия деформаций, выполнен ное в виде индикатооа часового ти- 2 . Общий недостатком этих, устройств является низкая точность определения ползучести обуслсвпенная влияни ем массы нагружающей системы. Цель изобретения - повышение точ ности определения ползучести напряжения путем исключения влияния массы нагружающей cHCTCNti, Поставленная цель достигается за счет того, что в устройство для исследования ползучести волокнистосетчатых материалов, содержащем кор пуСэ установленную в нем нагружаюwy Q систему, включающую пассивный и актизныи захваты уоками для креп ления образцов исследуемых материа лов, шток, связанный активным за хватом, площадку для размещения гру зов;, зЭкрепленную на штоке, и средство измерения деформаций, выполнен ное в виде индикатора часового типа каждая из губок для крепления образ ца, расположеннь х на активном захвате, выполнена в вчде дзуплечего рычага, закрепленного на захвате с возможностью поворота; в активном захвате, штоке и грузовой площадке выполнены сквозные coocvibie ,отверстия, а устройство снабжено щеками с фигурными вырезами, жестко закрепленными на актирном захвате, ползуном, охватывающим шток и установлен ным с возможностью осевого переме- щения относительно последнего, тягами по числу губок, шарнирно связанными одними концами с ползуном, а другими - с соответствующими плечами двуплечих рычагов, полыми шпильками, одна из которых размещена в пассивном захвате, з другая - вырезах щек активного захвата, и гибкой тягой, связанной своими концами соответственно со шпилькой активного захвата и средством измерения деформации и проходящей через отверстия в активном захвате, штоке и грузовой площадке. Индикатор установлен под грузовой площадкой,, а устройство снабжено лреобразователем перемещения, выполненным в виде двух соосноустановленных шкивов, один из которых охвачен гибкой тягой, а другой связан с индикатором. На (|)иг.1 изображена схема устройства; нэ фиг.2 - схема активного захвата; на фиг.З то же, вид сбоку , на 1|)игД - схема крепления образца. Устройство содержит корпус 1, размещенную -3 нем нагружающую систему, вгшйча-ощуго пассивный захват 2, активный захват 3 с жестко закрепленными нэ нем именами k с ()игурныни вырезами, шток 5, связанный одним концом с активным захватом 3 на другом конце которого закреплена грузовая площадка 6. На штоке 5 установлен полаун 7, охватывающий шток 5 . Ползун 7 имеет возможность осевого перемещения относительно штока 5. Для фиксации ползуна 7 в нем установлен стопорный винт 8. На активном захвате шарнирно закреплены губки, каждаяиз которых выполнена в виде двуплечего рычага 9, установленного с возможностью поворота нэ оси 10. Каждый из рычагов 9 связан с ползуном 7 при помощи соответствуодей тяги 11. В фигурных вырезах щек k активного захвата 3 размещена полая шпилька 12. Аналогичная шпилька размещена в губказ (не показаны) захвата 2. В активном захвате 3. штоке 5 и грузовой площадке 6 выполнены сквозные соосные отверстия I не показаны), через которые проходит гибкая тяга 13, связанная одним концом со шпилькой 12, усановленной 8 вырезах щек k активного захвата 3 s другим концом - с средством измерения ,цеформации. По3 . спеднее выполнено в вире установлен ных под грузовой площадкой 6 на стойках 1+ индикатора 15 часового типа и преобразователя перемещения, выполненного в виде охваченного гиб кой тягой 13 шкива 16 и соосно с ним установленного на sai.y 17 шкива 18, связанного гибкой тягой 19 с индикатором 15. Устройство работает следующим об разом, , Концы образца 20 огибают вокруг полых шпилек 12 и закрепляют тремя-четырьмя стежками ниточного шва 21. При этом гибкая тягз 13 связанная с шпилькой 12, установлен ной в вырезахщек активного захва та 3 проходит через отверстие 22,предварительно выполненное в образце 20 соосно отверстиям в активном захвате 3, штоке 5 и грузовой площадке 6. Шпилька 12 активного захвата 3 закрепляется между соответствующими плечами двуалечих рычагов 9. Положение каждого из рычагов 9 через соответствующие тяги 11 фиксируется при перемещении ползуна 7 стопорным винтом 8. Другой конец образца 20 с помощью аналогич ной полой шпильки фиксируется в пас сивном захвате 2, После этого на гр зовую площадку 6 устанавливают груз 23.При этом гибкая тяга 13 опускается совместно с активным захватом 3 и происходит, растяжение образца 20. Равновесие преобразователя пере мещения нарушается, причем при пере .мещении гибкой тяги 13 вниз шкив 16 и установленный соосно с ним на ва194 . лу 17 шкив 18 поворачиваится на угол, пропорциональный перемещению активного захвата 3. Для исследования пооцесса ползучести стопорный винт 8 вйворачивают, При этом устраняется силовой контакт между ползуном 7 и штоком 5. Ползун 7 перемещается вниз, перемещая при этом тяги 11, которые в свою очередь поворачивают рычаг 9 и образец 20 освобождается от действия активного захвата 3, после чего он начинает сокращаться. При этом гибкая тяга 13 поднимается вверх. Перемещение гибкой тяги 13 через шкивы 16 и 18 и гибкую тягу 19 фиксируется индикатором 15. Разность показаний индикатора 15 при нагружении образца 20, и после его разгрузки характеризует величину ползучести. Использование в активном захвате губок в виде двуплечих рычагов, связанных с ползуномJ охватывающим шток и установленным с возможностью перемещения вдоль последнего, а также полых шпилек для крепления образца, одна из которых установлена в губках активного захвата и связана гибкой тягой с индикатором, дает возможность использовать массу за- хвата при нагружении образца,Га при исследовании релаксационных свойств волокнисто-сетчатых материалов исключить влияние массы захвата при помощи устранения силового контакта между губками захвата и полой шпилькой, на которой закреплен образец, что позволяет повысить точность определения ползучести.
®
О
4
Ц--// -5
8
%
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания грунта на сдвиг | 1983 |
|
SU1162895A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| Машина для сортировки коконов по деформации их оболочек | 1951 |
|
SU97830A1 |
| Установка для испытания образцов материалов при сложном напряженном состоянии | 1991 |
|
SU1809356A1 |
| Нагружающее устройство для испытаний материалов на ползучесть при растяжении совместно с кручением | 1991 |
|
SU1796965A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Устройство для испытания образца материала на консольный изгиб, кручение, растяжение, сжатие и сложное сопротивление при постоянной и переменной нагрузке | 2016 |
|
RU2678595C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ МАТЕРИАЛОВ НА РАСТЯЖЕНИЕ, СЖАТИЕ И КРУЧЕНИЕ ПРИ ПОСТОЯННОЙ И ПЕРЕМЕННОЙ НАГРУЗКАХ | 2013 |
|
RU2533340C2 |
| РЫЧАЖНО-СЕГМЕНТНАЯ ЛЕБЕДКА | 2003 |
|
RU2269484C2 |
| Манипулятор для рулонов листового материала | 1978 |
|
SU889592A1 |
фиг. 2
фиг.З
JB
(рг/е.
Ill
/2
f
12
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кудряшов Н.И | |||
| и др | |||
| Высокоскоростное растяжение текстильных материалов, М., Легкая индустрия, 1974, с.115 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Заводская лаборатория, 1381, № 2, С.86 (прототип). | |||
