(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Роторная линия для центробежного литья гильз | 1981 |
|
SU1012500A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Захват промышленного робота | 1985 |
|
SU1313705A1 |
| Установка для снятия искусственной оболочки с сыра | 1978 |
|
SU858681A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| Карусельный манипулятор | 1980 |
|
SU903050A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |

1 ,
Изобретение относится к механизации плазменной обработки металлических изделий типа тел вращения и может быть использовано в манипуляторах с многопозициониой поворотной планшайбой для захвата и вращения изделия в процессе обработки.
Известен захват манипулятора, содер- жащий корпус, подвижно смонтированный на нем стакан, зубчатое колесо и зажимные губки с механизмом из раскрытия (И- .
Недостатками известного устройства являются сложность кинематической схемы, а также сложность системы подвода энергоносителя и малая надежность системы управления, что снижает надежность работы манипулятора и его производительность.
Цель изобретения - повышение надежности работы и производительности манипулятора.
Указанная цель достигается тем, что захват манипулятора снабжен закрепленными на стакан токосъемником, подпружиненным штоком, имеющим жестко закреплённое на нем .коромысло с толкат елями и приставкой со смонтированными на роликах подпружиненными ползунами, нмеющими фигурные пазы, подпружиненной опорной площадкой и защелками, причем механизм раскрытия губок снабжен смонтированными на приставке двуплечими ры, чагами с фигурными пазами, выполненными на одном плече каждого рычага, а подпружиненный шток кинематически связан с зажимными губками и подпружиненными защелками опорной площадки.
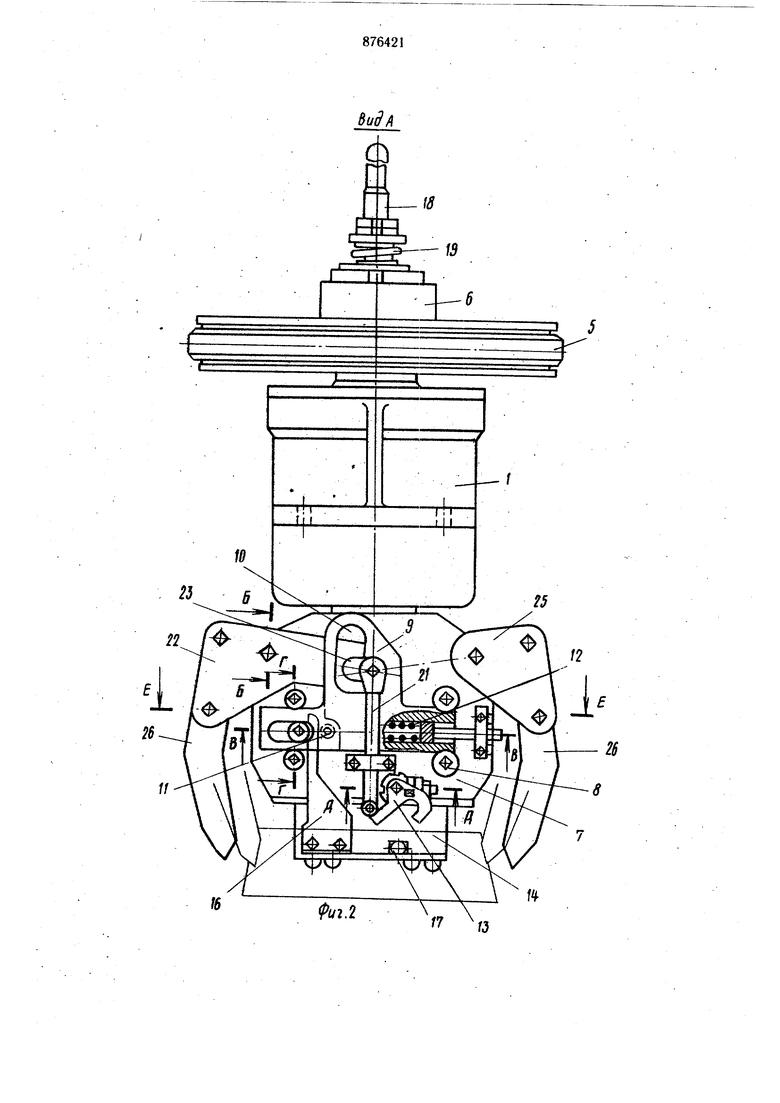
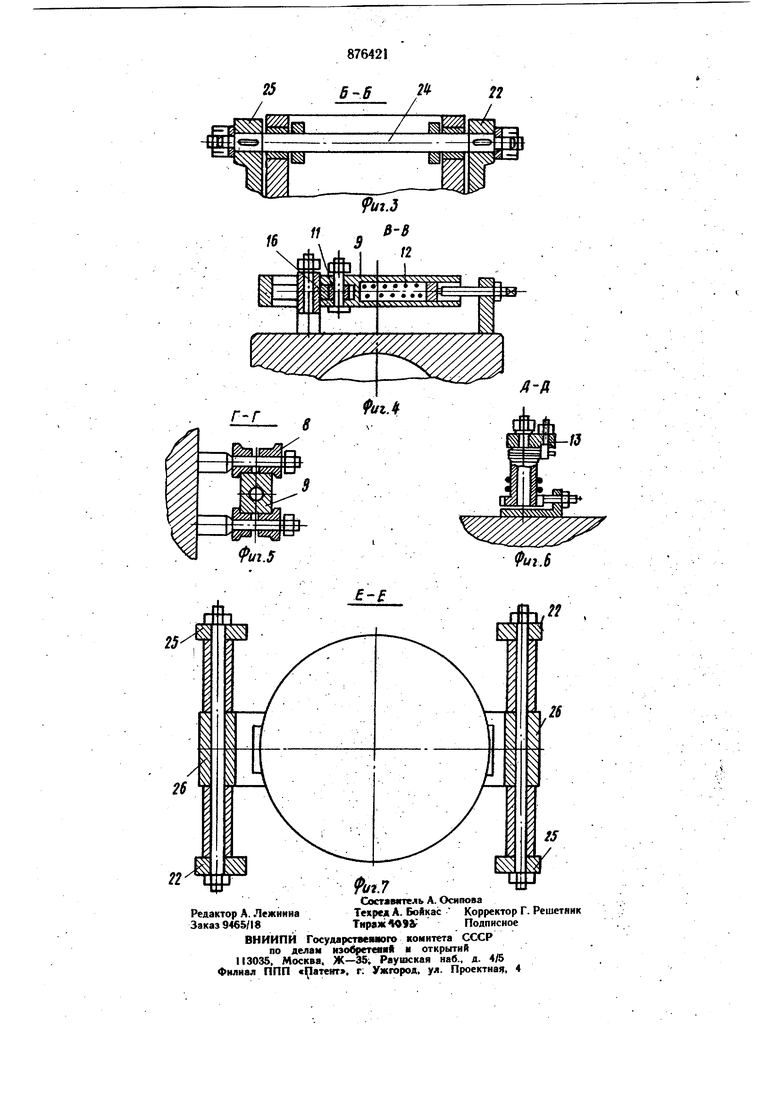
На фиг. 1 показан захват манипулятора, продольный разрез; на фиг. 2, - вид А на фиг. 1; на фиг. 3 - разрез Б-.5 на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - рйзрез Г-Г на фиг. 2; на фиг. 6 разрез Д-Д на фиг. 2; на фиг. 7 - разрез Е-Е на фиг. 2..
15 , В корпусе I с лапами для закрепления на поворотной планшайбе манипулятора крепится на двух радиальных 2 и двух упорных 3 шарикоподшипниках стакан 4 с зубчатым колесом 5 и токосъе.мником 6. На стакане 4 закреплена приставка 7. на которой смонтированы на роликах 8 два ползуна 9, имеющие выполненные во нчаимно перпендикулярных плоскостях фигурные пазы 10 и снабженные опорными роликами 11 и пружинами 12 фиксации раскрытия зажимных губок, а также две подпружиненные..защелки ЧЗ. В пцчставку 7 вмонтирована подвижная опорная площадка 14 с пружиной 15. На подвижной опорной плошадке 14 закреплены два клина 16 и два. пальца 17. Внутри стакана 4 и на приставке 7 смонтирован рычажно-пружинный механизм, который содержит шток 18 с пружиной 19, жестко закрепленное на штоке 18 коромысло 20 с двумя толкателями 21, два ю двуплечих рычага 22, на одном плече у которых имеются фигурные пазы 23. Двуплечие рычаги 22 жестко соединены валами 24 со щеками 25. Между каждым вторым плечом двуплечих рычагов 22 и каждой щекой 25 закреплены зажимные; губки 26.
Захват карусельного манипулятора работает следующим образом.
Задаваемое в захват карусельного манипулятора изделие нажимает одной плоскостью на подвижную опорную площадку 14, „ которая, сжимая пружину 15, перемещается вверх вместе с клиньями 16 и пальцами 17. Клинья 16, взаимодействуя с опорными роликами 11, перемещают на роликах 8 ползуны 9 вправо, при этом пружины 12 сжимаются. При попадании коромысла 25 20 в вертикальные части профильных зов 10 ползунов 9 освобождается пружина 19, которая перемещает вверх,щток 18 с коромыслом 20 и толкателями 21, при этом коромысло .20, взаимодействуя с фигурными пазами 23, поворачивает через двупле- 30 чие рычаги 22, валы 24 и щеки 25 зажимные губки 26. Происходит сведение зажимных губок 26 и захват тем самым изделия. Одновременно с этим толкатели 21 освобождают подпружиненные защелки 13, крюки которых под действием пружин кручения охватывают пальцы 17 подвижной опорной площадки 14. Происходит разгрузка зажимных губок 26 от действия сил пружины 15 и веса подвижной опорной площадки 14. Силы, возникающие при задаче о изделия в захват манипулятора, а также силы веса изделия и стакана 4 с размещенными на нем деталями и механизмами воспринимают два упорных щарикоподшипника 3 и через корпус I передают на поворотную планшайбу манипулятора.45
При заходе в зацепление с шестерней привода захвата манипулятора зубчатое колесо 5приводит во вращение на двух радиальных 2 и двух упорных 3 шарикоподшипниках стакан 4, который в свою .очередь приводит во вращение через пристав- 50 ку 7, валы 24, двуплечие рычаги 22 и щеки 25 захваченное зажимными губками 26 изделие. Одновременно с этим входит в контакт с токоподводом (тормозом карусельного манипулятора) токосъемник 6, который, вращаясь со стаканом 4, передает на ббрабатываемое изделие через приставку 7
и зажимные губки 26 рычажно-пружнмного механизма один полюс постоянного тока, необходимого для образования плазменной дуги.
Раскрытие зажимных губок 26 осуществляется толкателем карусельного манипулятора, который нажимает на шток 18 и, преодолевая усилие пружины 19, пере.мещает его вместе с коромыслом 20 и толкателями 21 вниз, при этом коромысло 20, взаимодействуя с фигурными пазами 23, поворачивает через двуплечие рычаги 22, валы 24 и щеки 25 зажимные губки 26. Происходит разведение зажимных губок 26 и освобождение тем самым изделия. Одновременно с этим толкатели 21 нажимают на подпружиненные защелки 13, крюки которых освобождают пальцы 17. Под действием пружины 15 подвижная опорная площадка 14 с пальцами 17 и клиньями 16 перемещается вниз, при этом клинья 16, взаимодействуя с опорными роликами 11,освобождают noiiзуны 9, .которые под действием пружин 12 перемещаются на роликах 8 влево, заводя свои горизонтальные части фигурных пазов 10 под коромысло 20 и фиксируя тем самым раскрытие зажимных губок 26. Толкатель карусельного манипулятора снимает свою нагрузку со штока 18. Захват карусельного манипулятора приво аится в исходное положение.
Использование предлагаемой конструкции позволит повысить надежность работы манипулятора при плазменной обработке металлических изделий и производительность, что дает экономический эффект.
Формула изобретения
Захват манипулятора, содержащий корпус, подвижно смонтированный на нем стакан, зубчатое колесо и зажимные губки с механизмом их раскрытия, отличающийся тем, что, с целью повышения надежности работы и производительности, он снабжен закрепленными на стакане токосъемником, подпружиненным штоком, имеющим жестко закрепленное,на нем коромысло с толкателями и приставкой со смонтированными на роликах подпружиненными ползунами, имеющими фигурные пазы, подпружиненной опорной площадкой и защелками, причем механизм раскрытия губок снабжен смонтированными на приставке двуплечими рычагами с фигурными пазами, выполненными на одном плече каждого рычага, а подпружиненный щток кинематически связан с зажимными губками и подпружиненными защелками опорной площадки.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 598749, кл. В 25 J 9/00, 1975.
Y
