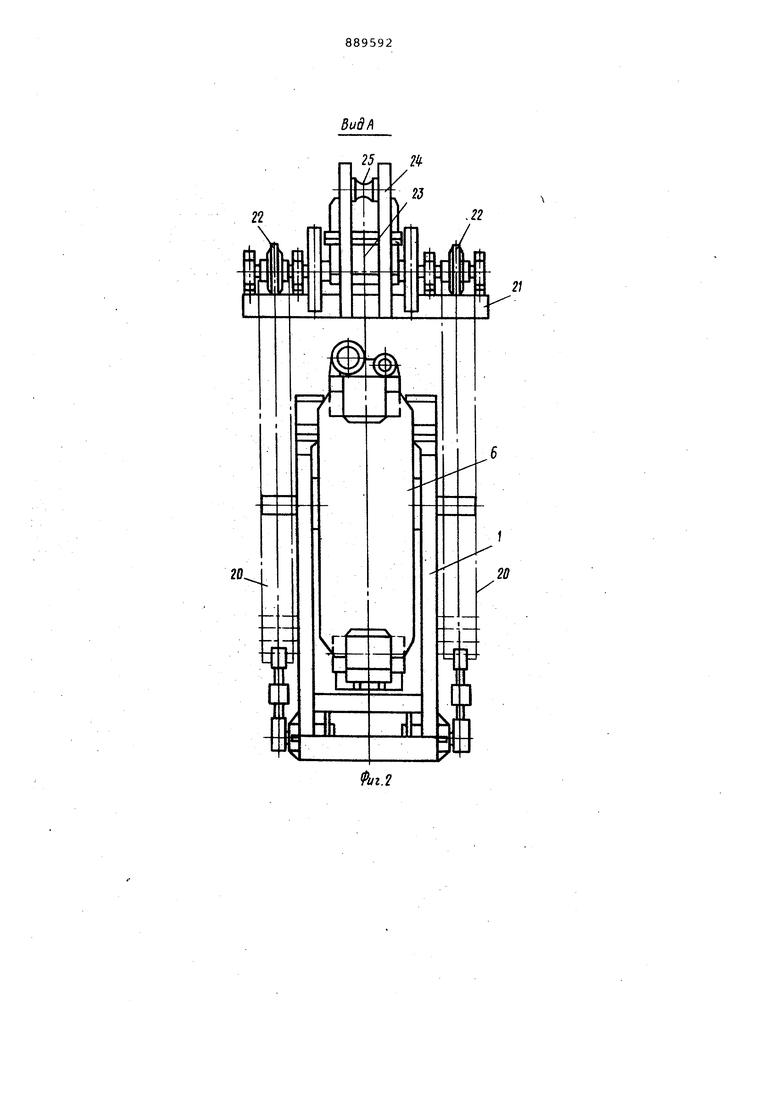
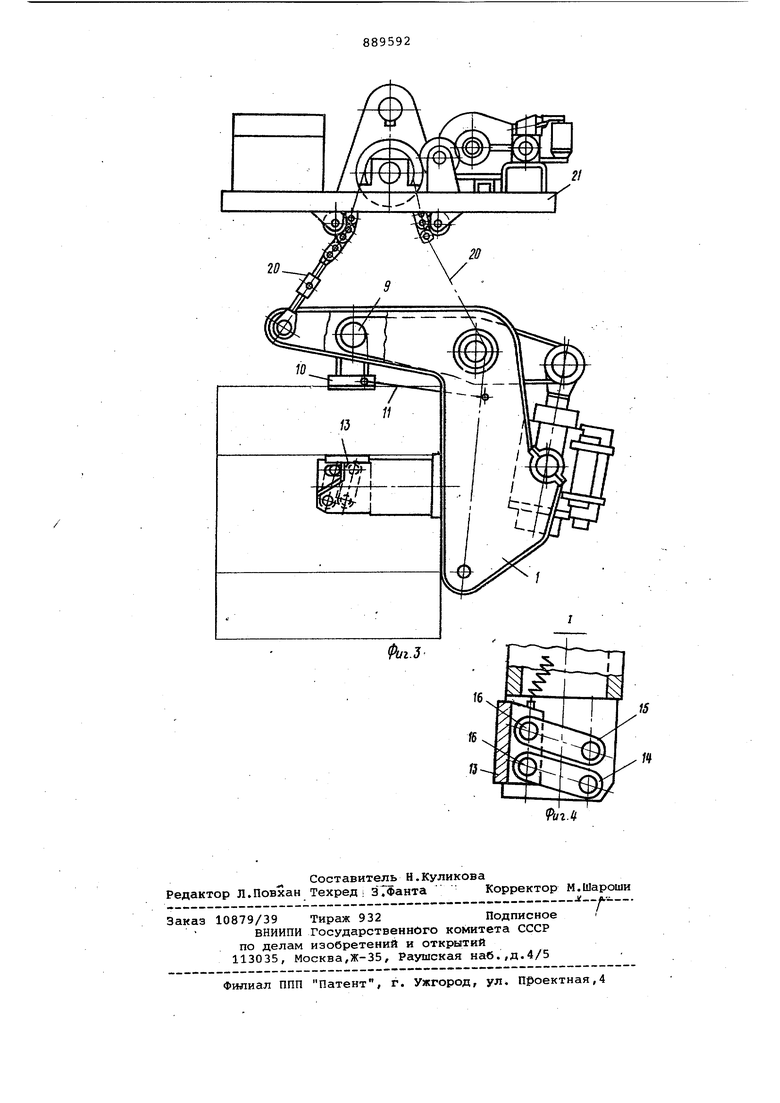
(54) МАНИПУЛЯТОР ДЛЯ РУЛОНОВ ЛИСТОВОГО Изобретение относится к подъемнотранспортному машиностроению, в част .кости к манипуляторам для рулонов листового материала. Известен манипулятор для рулонов листового материала, содержащий под вешенный на гибких подвесках захват, включающий раму с закрепленным на не гидроцилиндром, шток которого шарнир но соединен с двуплечим рычагом, и Зс1жимные губки, поворотно разме11енные одна на раме, а другая - на свободном конце рычага tl. Недостаток известного устройства отсутствие устройства для самозатягивания рулона, что значительно снижает надежность и безопасность работ устройства. Целью изобретения является повыше ние надежности работы и его безопасности . Цель достигается тем, что манипулятор снабжен гибкой тягой, один конец которой закреплен на губке, связанной с двуплечим рычагом, а дру гой - на раме. Кроме того, соединение губки, зак репленной на раме, в последней, может быть выполнено в виде шарнирно,го параллелограмма и пружины. МАТЕРИАЛА На фиг. 1 представлен манипулятор общий вид на фиг.2 - фид А на Фиг. 1; на фиг. 3 - манипулятор при кантовании рулона общий вид; на .:а .фиг. 4 - узел I на фиг. 1. Манипулятор для рулонов листового материала, например, стали, содержит захват, включающий раму 1 с вырезом 2, в котором размещен рабочий гидроцилиндр 3, установленный поворотно на раме с помощью оси 4. На раме пос дством оси 5 смонтирован также двуплечий рычаг 6, одно плечо которого шарнирно соединено осью 7 со штоком В гидроцилиндра 3, а второе плечо рычага шарнирно соединено осью 9 с зажимной губкой 10. На последней одним концом закреплена гибкая тяга 11, другой конец которой укреплен на раме 1.. Для того, чтобы губка 10 всегда была сориентирована перпендикулярно к образующей рулона при любых положениях рычага 6, длина тяги 11 до.лжна быть равна расстоянию между осями 5 и 9 (второе плечо рычага). В этом случае тяга является стороной параллелограмма, образованного губкой 10, вторым плечом рычага и раой 1 (расстояние между осью 5 и точей крепления тяги к раме).
К раме 1 металлоконструкцией 12 рикреплена губка 13. Чтобы обеспечить высокую надежность удержания рулона, губка 13 установлена на металлоконструкции с возможностью самозажатия. Для этого на металлоконтрукции одним концом шарнирно на сях 14 прикреплены пластины 15,друой конец которых прикреплен также арнирно на осях 16 к губке 13.
В случае отключения электропитания ли обрыва, гидролиний для обеспечения надежного удерживания рулона предусмотрен гидроаккумулятор 17, установленный на рабочем гидроцилиндре 3 На раме 1 установлен также золотник 18, осуществляющий подпитку рабочей жидкостью гидроцилиндр 3. Реле давления 19 укреплено на раме 1 и служит для регулировки давления в рабочем гидроцилиндре.
Захват подвешен на гибких подвесках, например, цепях 20, которые огибают установленные на платформах 21 звездочки 22, кинематически связанные с приводом 23, размещенным на платформе 21, на которой укреплены щеки 24 с осью 25 для навешивания на крюк грузоподъемного средства (не показано).
Манипулятор работает следующим образом.
Перед началом работы манипулятор навешивается на крюк грузоподъемного средства, например, мостового крана. Гидроаккумулятор заряжается до величины рабочего давления гидросис- темы. Шток 8 гидроцилиндра 3 втянут и губки 10 и 13 разведены. Манипулятор поднимается-краном на необходимую высоту и ориентируется в соответствии с положением оси симметрии рулона (вертикально или горизонтально). Затем губка 13 заводится в отверстие рулона. Опускание захвата осуществляется до упора рулона в раму захвата. После этого рабочий гидроцилиндр 3 заполняется рабочей жид|:остью, шток
начинает перемещаться и воздействует на двуплечий рычаг, который, поворачиваясь подводит зажимную губку 10 к наружной боковой поверхности рулона. При смыкании губок витки ленты рулона сближаются до полного соприкосновения. По окончании хода губок давление в гидросистеме начинает рости и по достижении расчетной величины срабатывает реле давления 19 j которое выдает сигнал, разрешающий подъем. ВО время подъема захвата с рулоном и его транспортировки производится кантование рулона. По причбытии на место рулон укладывается, губки разжимаются и отводятся от рулона.
Таким образом, конструкция манипулятора является и безопасной в работе.
Экономический эффект от внедрения одного манипулятора ориентировочно 118 тыс.р.
Формула изобретения
1.Манипулятор для рулонов листового материала, содержащий подвешенный на гибких подвесках захват,включающий раму с закрепленным на ней гидроцилиндром,шток которого шарнирно соединен с двуплечим рычагом,и зажимные губки поворотно размещенные одна на раме,а другая -. на свободном конце рычага, отличающийся тем, что, с целью повышения надежности работы и его безопасности, манипулятор снабжен гибкой тягой, один конец которой закреплен на губке, связанной с двуплечим рычагом, а другой - на раме.
2. Манипулятор по п.1, о т л и чающийся тем, что соединение губки, закрепленной на раме, с последней, выполнено в виде шарнирного параллелограмма и пружины. Источники информации, принятые во внимание при экспертизе
1. Патент ФРГ № 1244359, кл. 35 В, (прототип).
22
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь для рулонов листовой стали | 1979 |
|
SU977354A1 |
| Захват-кантователь | 1983 |
|
SU1221168A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Захват-кантователь для изделий | 1986 |
|
SU1370047A1 |
| Грузозахватное устройство | 1988 |
|
SU1595780A1 |
| ПОДВЕСНОЙ МАНИПУЛЯТОР | 2009 |
|
RU2433017C2 |
| Захват-кантователь | 1987 |
|
SU1518268A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Грузозахватное устройство | 1986 |
|
SU1426925A1 |
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |