f . 1
Изобретение относятся к технике измерения вязкости жидкости и касает ся измерителей, обеспечивающих автоматическое измерение вязкости контролируемой жидкой среды.
Цель изобретения - тювьппение точности измерения за счет обеспечения равномерного, и прямолинейного движения зонда.
На фиг.1 дана структурная схема измерителя; на фиг.2 - схема регулятора наклона рамы; на фиг.З - схема узла анализа; на фиг.4 - схема узла управления.
Измеритель содержит (фиг.1) раму 1, на которой закреплены оси первого 2 и второго 3 роликов, задающих направление движения зондопроводника 4, на котором крепится зонд 5, воспринимающий тормозящее действие исследуемой жидкости, и на который через равные промежутки нанесены метки, пружину 6, смещающую подвижный второй ролик 3 и обеспечивающую заданное натяжение зондопроводника 4, программное реле 7, определяющее ритм измерения вязкости и вьщающее в требуемые моменты времени управляющие напряжения на свои выходы, электромагнит 8, затормаживающий и растормаживающий ось вращения рамы 1 в процессе измерения, первый электродвигатель 9, вращающий ось рамы 1 в процессе измерения, второй электродвигатель 10, вращаюр5ий третий ролик 11, третий ролик 11, перемещающий зонд 5 в исходное состояние перед началом измерения, реле 12, подключающее первый электродвигатель 9 к требуемой цепи напряжения, регулятор 13, управляющий наклоном рамы 1 для достижения требуемой скорости движения зонда 5, первый концевой выключатель 14, отключающий первый электродвигатель 9 при достижении рамой 1 горизонтального положения в процессе подготовки очередного замера, второй концевой выключатель 15, отключаюЕций второй электродвигатель 10 после возвращения зонда 5 в исходное состояние перед замером, преобразователь 16 вал код, обеспечивающий автоматическую вьщачу результата во внешнюю цепь, стрелку 17, закрепленную на раме и позволяющую сделать визуальный отсчет результата по шкале 18, позволяющей произвести отсчет в градусах или в значениях вязкости, если плот462
ность жидкости, соответствует заданной при градуировке.
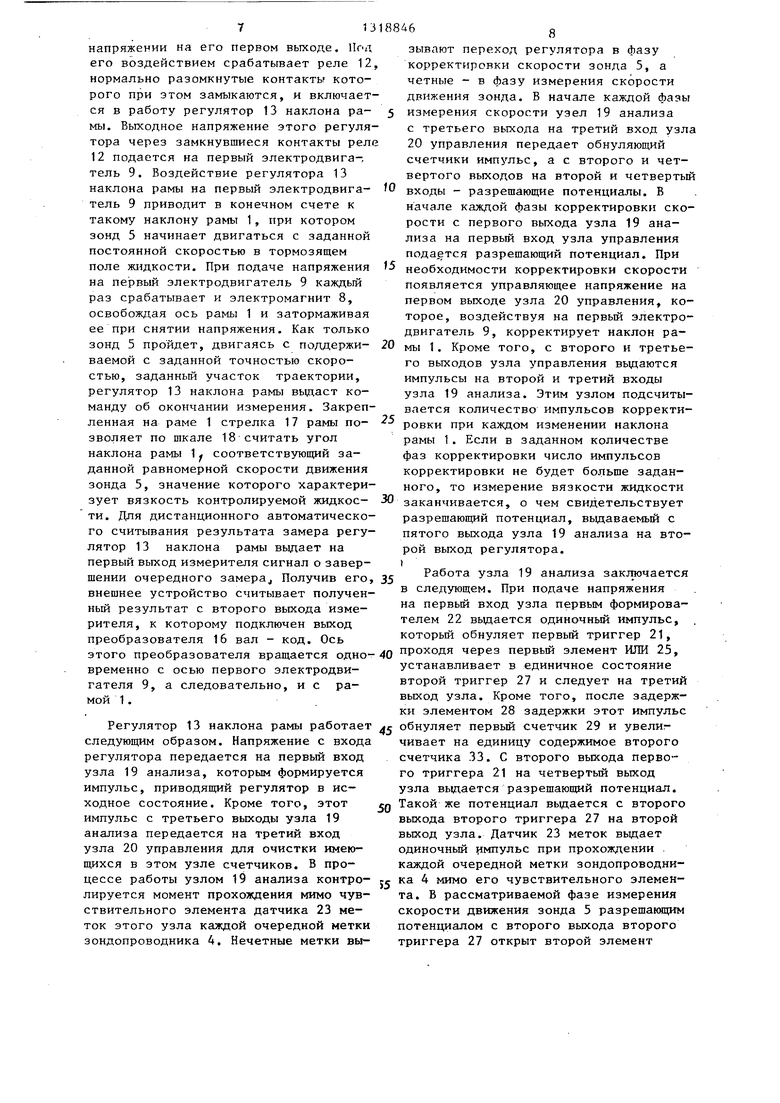
В состав регулятора 13 наклона рамы (фиг.2) входят узел 19 анализа,
определяющий время окончания очередного замера, и узел 20 управления, выдающий напряжение, управляющее работой первого электродвигателя 9.
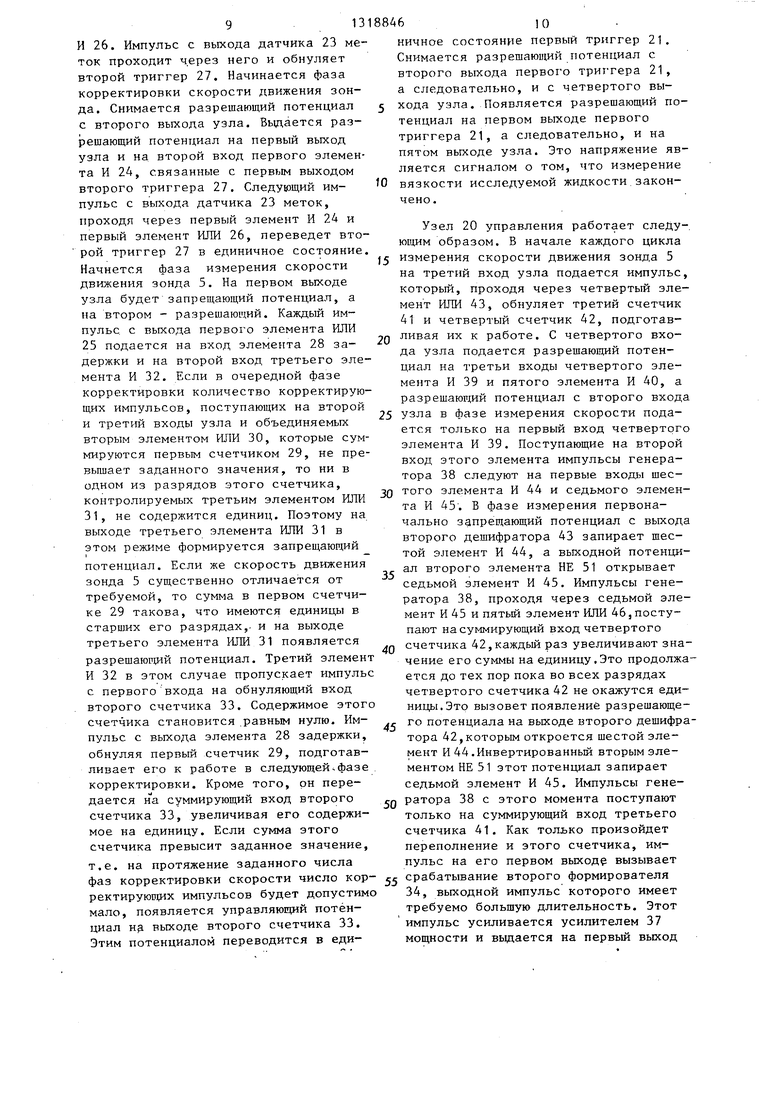
Узел анализа (фиг.З) содержит первый триггер 21, фиксирующий момент окончания измерения, первый формирователь 22, вьщаюи(ий импульс, устанавливающий элементы схемьь в исходное состояние в начале измерения, датчик
23 меток, вьщающий импульс при прохождении каждой метки зондопроводника 4 мимо его чувствительного элемента, первый элемент И 24, выдающий импульс в начале очередного цикла
измерения скорости движения зонда 5, первый элемент ИЛИ 25, объединяющий цепи импульсов начала замера скорости, второй элемент И 26, выдающий импульс окончания очередного замера скорости, второй триггер 27, формирующий потенциалы начальной и конечной стадии замеров скорости, элемент 28 задержки, задерживающий проходящий импульс на время анализа соответствия
измеренной скорости заданной, первый счетчик 29, суммирующий число импульсов корректировки скорости при ее очередном замере, второй элемент РШИ 30, объединяющий цепи импульсов корректировки скорости, третий элемент ИЛИ 31, выдающий разрешающий потенциал при наличии единиц в старших разрядах первого счетчика 29, третий элемент И 32, пропускающий входной
импульс при недопустимо большой сумме в первом счетчике 29, второй счетчик 33, выделяющий сумму замеров при допустимо малой корректировке скорости.
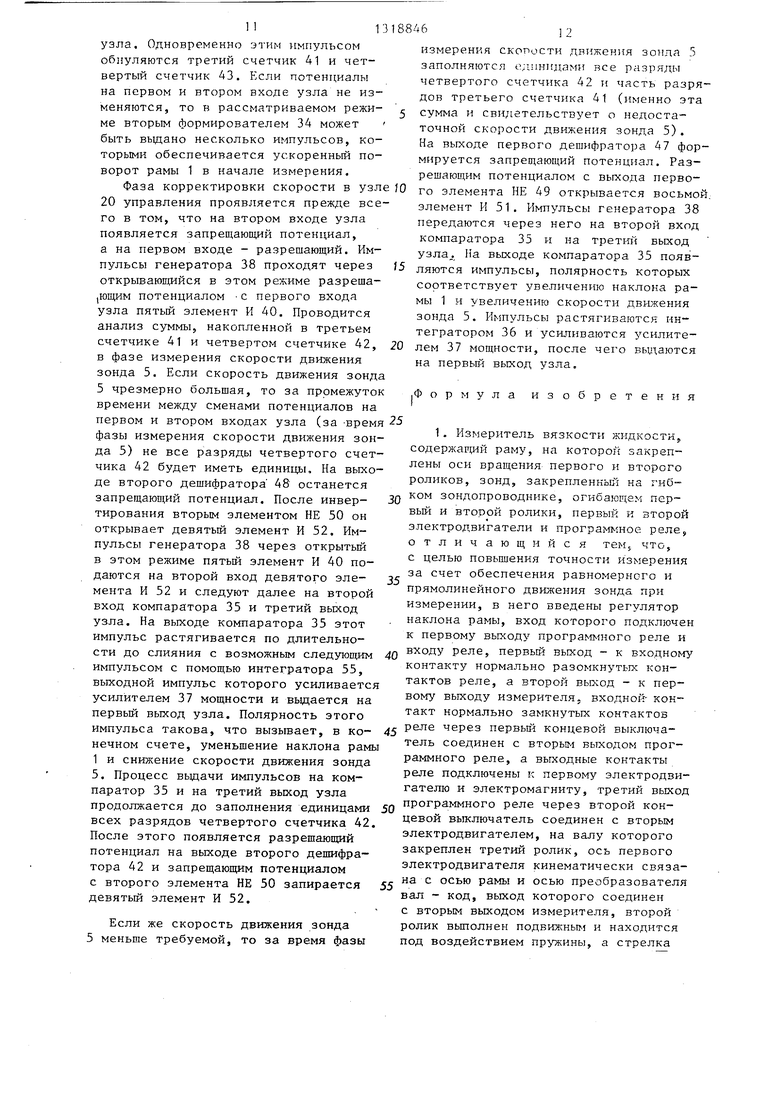
Узел регулирования (фиг.4) содержит второй формирователь 34, формирующий импульс ускоренной корректировки положения рамы 1 в начале замера, компаратор 35, формирующий фазу управляющего напряжения, интегратор 36,
растягивающий длительность корректирующих импульсов до их слияния, усилитель 37 мощности, формирующий напряжение первого электродвигателя 9
при корректировке, генератор 38, выдающий прямоугольные импульсы, четвертый элемент И 39, пропускающий импульсы оценки скорости, пятый элемент И 40, пропускающий импульсы корректировкп скорости, третий счетчик 41, суммирующий импульсы превышения номинальной суммы, четвертый счетчик 42, суммирук)Р1Ий импульсы недостачи до номинальной суммы, четвертый элемент ИЛИ 43, объединяющий цепи обнуляющих счетчики импульсов, шестой элемент И 44, пропускающий импульсы на сумми- рующир вход третьего счетчика 41 при превышении номинальной суммы, седьмой элемент И 45, пропускающий импульсы при недостаче суммы в четвертом счетчике 42, пятый элемент ИЛИ 46, про- пускаюпщй импульсы на суммирующий вход четвертог о счетчика 42, первый дешифратор 47, вьщающий разрешаювр й потенциал при равенстве нулю суммы третьего счетчика 41, второй дешифратор 48, вьщающий разрешающий потенциал при равенстве суммы четвертого счетчика 42 номинальной сумме, первый элемент НЕ 49, инвертирующий потен1,и- ал на выходе первого дешифратора 47, второй элемент НЕ 50, инвертирующей
выходной потенциал второго дешифрато-25 третий и четвертый выходы - соответ
ра 48, восьмой элемент И 51, пропускающий импульсы корректировки скорости зонда 5 в сторону увеличения, девятый элемент И 52, пропускающий импульсы корректировки скорости при
необходимости ее снижения. I
Рама 1 (фиг.1) закреплена на оси, кинематически связанной с валом первого электродвигателя 9 и осью преобразователя 16 вал - код, На раме 1 неподвижно закреплена ось первого ролика 2 и, имея возможность смещаться закреплена ось второго ролика 3, Через ролики перекинут гибкий зондопро- водник 4 с нанесенными метками, концы которого с двух сторон закреплены на зонде 5, имеющем шаровую форму. Натяжение зондопроводника 4 обеспечивается смещением второго ролика 3, ось которого смещается под воздействием пружины 6, второй конец которой закреплен на раме 1, Первый выход программного реле 7 соединен с входом регулятора 13 наклона рамы и реле 12, второй его выход - с одним из контактов первого концевого выключателя 14, а третий выход - с одним из контактов второго концевого выключателя 15. Второй контакт первого концевого выключателя 14 соединен с входным контактом нормально замкнутых контактов реле 12. Второй контакт второго концевого выключателя 15 подключен к
fO 20
НЙ/И)4
второму электродвиг ателю 10. электродвигатель 9 соединен с iju Ki- ромагнитом 8 и выходными контактами реле 12. Входной ко ггакт иорм-мльно разомкнутых контактов реле 12 соединен с первым выходом регулятора 13 наклона рамы, второй выход которого подключен к первому выходу измерителя. На валу второго электродвиг лтеля 10 закреплен третий ролик 11, В исходном (перед измерением) состоянии второй ролик 3 воздействует на третий ролик 11 и первый концевой выключатель 14, а зонд 5 - на первый кон- f5 девой выключатель 15, Выход преобразователя 16 вал - код соединен с вторым выходом измерителя. Стрелка рамы 17, закрепленная на раме 1, находится над шкалой измерителя 18.
Нервый вход (фиг.2) узла 19 анализа соединен.с входом регулятора, его второй и третий входы - соответственно с вторым и третьим выходом узла 20 управления, а первый, второй.
0
0
,
ственно с первым, вторым, третьим и четвертым входами узла 20 управления. Пятый выход узла 19 анализа подключен к второму выходу регулятора, а первый выход узла 20 управления - к первому вькоду регулятора.
Вход первого формирователя 22 (фиг,3) соединен с первым входом узла 19, а выход - с первыми вxoдa fи пер- 5 вого элемента ИЛИ 25 и первого триггера 21, Второй вход этого триггера подключен к выходу второго счетчика 33, а его первьш и второй выходы - к четвертому и пятому выходам узла соответственно. Выход датчика 23 меток соединен с первыми входами первого Элемента И 24 и второго элемента И 26. Второй вход первого элемента И 24 подключен к первому выходу второго триггера 27 и первому выходу узла 19, а его выход - к второму входу первого элемента ИЛИ 25, Выход первого элемента ИЛИ 25 соединен с входом элемента 28 задержки, первым входом второго триггера 27, первым входом третьего элемента И 32 и третьим выходом узла 19, Второй вход второго элемента И 26 подключен к второму выходу второго триггера 27 и второму выходу узла 19, а его выход - к второму входу второго триггера 27, Выход элемента 28 задержки соединен с обнуляющим входом первого счетчика 29 и суммирующим входом второго счет5
513
чика 33. Суммирую1дий вход первого счетчика 29 подключен к выходу второго элемента ШШ 30, а группа его выходов - к группе входов третьего элемента ИЛИ 31. Первый и второй входы второго элемента 30 соединены с вторым и третьим входами узла 19 соответственно. Второй вход третьего элемента И 32 подключен к выходу третьего элемента ИЛИ 31, а его выход - к обнуляющему входу второго счетчика 33.
Первый вход четвертого элемента И 39 (фиг,4) соединен с первым входом узла 20, его второй вход подключен к выходу генератора 38 и второму входу пятого элемента И АО, третий вход - к третьему входу пятого элемента И АО и четвертому входу узла 20, выход - к первым входам шестого элемента И АА и седьмого элемента И А5 Первый вход пятого элемента И АО соединен с вторым входом узла, а выход-- с вторыми входами восьмого элемента И 51 и девятого элемента И 52„ Вход второго формирователя ЗА соединен с первым выходом третьего счетчика А1, а его выход - с вторым входом четвертого элемента ИЛИ A3, вь1гх;одом интегратора 36 и входом усилителя 37 мощности, выход которого подключен к первому вькоду узла 20. Первый вход компаратора 35 соединен с выходом восьмого элемента И 51, вычитающим входом третьего счетчика А1 и вторым выходом узла 20, Его второй вход подключен к выходу девятого элемента И 52, второму входу пятого элемента ИЛИ А 6 и третьему выходу узла 20. Выход компаратора 35 соединен с входом интегратора 36, Первый вход четвертого элемента ИЛИ A3 соединен с третьим входом узла 20, а его выход - с обнуляющими входами третьего счетчика А1 -И четвертого счетчика А2. Выход niec- того элемента И АА подключен к сум- |мирующему входу третьего счетчика Al .а его второй вход - к выходу второго дешифратора А8 и входу второго элемента НЕ 50. Выход седьмого элемента И А5 соединен с первым входом пятого элемента ИЛИ А6, а его второй вход - с выходом второго элемента НЕ 50 и первым входом девятого элемента И 52. Группа входов первого дешифратора А7 соединена с второй группой выходов третьего счетчика А1, а его выход через первый элемент НЕ А9 гюд8А66
ключен к первому входу восьмого элемента И 51. Суммирующий вход четвертого счетчика А2 соединен с выходом пятого элемента ИЛИ А6, а группа
5 его выходов подключена к группе входов второго дешифратора А8.
Измеритель работает следующим образом.
Очередной цикл измерения начинается с приведения рамы 1 и зонда 5 в исходное состояние. Прежде всего программное реле 7 переходит во вторую позицию. При этом с второго его выхода через замкнутые контакты пер15 вого концевого выключателя 1А и нормально замкнутые контакты реле 12 подается напряжение на электромагнит 8 и первый электродвигатель 9. Электромагнит 8 растормаживает вал перво0 го электродвигателя 9, который начинает вращаться, поворачивая раму 1, в горизонтальное положение. Вращение вала первого электродвигателя 9 продолжается до тех пор, пока второй
5 ролик 3 не окажется прижатым к третьему ролику 11 и не сработает первый концевой выключатель 1А. При этом размыкаются контакты этого концевого выключателя и снимается напряжение
30 с первого электродвигателя 9 и электромагнита 8. Обесточенный электромагнит 8 затормаживает вал первого электродвигателя 9.
I
35 В заданный момент времени программное реле 7 переходит в третью позицию, в которой появляется напряжение на его третьем выходе. Через замкнутые контакты второго концевого
40 выключателя 15 оно передается на второй электродвигатель 10. Начинает вращаться вал этого электродвигателя, приводя во вращение третий ролик 11. Вращение этого ролика передается вто45 рому ролику 3, которым приводится в движение зондопроводник А, а через него - зонд 5, перемещающийся к первому ролику 2. При своем движении зонд 5 воздействует на второй конце-
50 вой выключатель 15 и разрывает его контакты. Напряжение с второго электродвигателя 10 снимается. Его ротор останавливается. Измеритель оказыва- ,ется подготовленным к очередному из55 мерению вязкости контролируемой жидкости.
Непосредственно измерение начинается после перехода программного реле 7 в первую позицию. Появляется
1318846 Под
fO
напряжении на его первом выходе его воздействием срабатывает реле 12, нормально разомкнутые контакть которого при этом замыкаются, и включается в работу регулятор 13 наклона рамы. Выходное напряжение этого регулятора через замкнувшиеся контакты реле 12 подается на первый электродвига-, тель 9. Воздействие регулятора 13 наклона рамы на первый электродвигатель 9 приводит в конечном счете к такому наклону рамьт 1, при котором зонд 5 начинает двигаться с заданной постоянной скоростью в тормозящем поле жидкости. При подаче напряжения на первый электродвигатель 9 каждый раз срабатывает и электромагнит 8, освобождая ось рамы 1 и затормаживая ее при снятии напряжения. Как только зонд 5 пройдет, двигаясь с поддерживаемой с заданной точностью скоростью, заданный участок траектории, регулятор 13 наклона рамы выдаст команду об окончании измерения. Закрепленная на раме 1 стрелка 17 рамы по- зволяет по шкале 18 считать угол наклона рамы 1 соответствующий заданной равномерной скорости движения зонда 5, значение которого характеризывают переход регулятора в фазу
зует вязкость контролируемой жидкое- 30 ти. Для дистанционного автоматического считывания результата замера регулятор 13 наклона рамы выдает на первый выход измерителя сигнал о завер- t шении очередного 3aMepaj Получив его, 35 внешнее устройство считывает полученный результат с второго выхода измерителя, к которому подключен выход преобразователя 16 вал - код. Ось
корректировки скорости зонда 5, а четные - в фазу измерения скорости движения зонда. В начале каждой фазы измерения скорости узел 19 анализа с третьего выхода на третий вход узла 20 управления передает обнуляющий счетчики импульс, а с второго и четвертого выходов на второй и четвертый входы - разрешающие потенциалы. В начале каждой фазы корректировки скорости с первого выхода узла 19 анализа на первый вход узла управления подается разрещающий потенциал. При необходимости корректировки скорости появляется управляющее напряжение на первом выходе узла 20 управления, которое, воздействуя на первый электродвигатель 9, корректирует наклон рамы 1. Кроме того, с второго и третьего выходов узла управления выдаются импульсы на второй и третий входы узла 19 анализа. Этим узлом подсчитывается количество импульсов корректировки при каждом изменении наклона рамы 1. Если в заданном количестве фаз корректировки число импульсов корректировки не будет больше заданного, то измерение вязкости жидкости
20
заканчивается, о чем свидетельствует разрешающий потенциал, выдаваемый с пятого выхода узла 19 анализа на второй выход регулятора.
гателя мой 1.
9,
осью первого электродви- а следовательно, и с раРабота узла 19 анализа заключается в следующем. При подаче напряжения на первый вход узла первым формирователем 22 выдается одиночный импульс, который обнуляет первый триггер 21,
этого преобразователя вращается одно-40 проходя через первый элемент ИЛИ 25, временно с осью первого электродви- устанавливает в единичное состояние
второй триггер 27 и следует на третий выход узла. Кроме того, после задержки элементом 28 задержки этот импульс
Регулятор 13 наклона рамы работает с обнуляет первый счетчик 29 и увеличивает на единицу содержимое второго счетчика 33. С второго выхода первого триггера 21 на четвертый выход узла выдается разрешающий потенциал. Такой же потенциал выдается с второго выхода второго триггера 27 на второй выход узла. Датчик 23 меток выдает одиночный импульс при прохождении
50
следующим образом. Напряжение с входа регулятора передается на первый вход узла 19 анализа, которым формируется импульс, приводящий регулятор в исходное состояние. Кроме того, этот импульс с третьего выходы узла 19 анализа передается на третий вход узла 20 управления для очистки имеющихся в этом узле счетчиков. В процессе работы узлом 19 анализа контро- jr лируется момент прохождения мимо чувствительного элемента датчика 23 меток этого узла каждой очередной метки зондопроводника 4. Нечетные метки вы-
каждой очередной метки зондопроводника 4 мимо его чувствительного элемента. В рассматриваемой фазе измерения скорости движения зонда 5 разрешающим потенциалом с второго выхода второго триггера 27 открыт второй элемент
8846
чь8
зывают переход регулятора в фазу
корректировки скорости зонда 5, а четные - в фазу измерения скорости движения зонда. В начале каждой фазы измерения скорости узел 19 анализа с третьего выхода на третий вход узла 20 управления передает обнуляющий счетчики импульс, а с второго и четвертого выходов на второй и четвертый входы - разрешающие потенциалы. В начале каждой фазы корректировки скорости с первого выхода узла 19 анализа на первый вход узла управления подается разрещающий потенциал. При необходимости корректировки скорости появляется управляющее напряжение на первом выходе узла 20 управления, которое, воздействуя на первый электродвигатель 9, корректирует наклон рамы 1. Кроме того, с второго и третьего выходов узла управления выдаются импульсы на второй и третий входы узла 19 анализа. Этим узлом подсчитывается количество импульсов корректировки при каждом изменении наклона рамы 1. Если в заданном количестве фаз корректировки число импульсов корректировки не будет больше заданного, то измерение вязкости жидкости
t
заканчивается, о чем свидетельствует разрешающий потенциал, выдаваемый с пятого выхода узла 19 анализа на второй выход регулятора.
каждой очередной метки зондопроводника 4 мимо его чувствительного элемента. В рассматриваемой фазе измерения скорости движения зонда 5 разрешающим потенциалом с второго выхода второго триггера 27 открыт второй элемент
913
И 26. Импульс с выхода датчика 23 меток проходит через него и обнуляет второй триггер 27. Начинается фаза корректировки скорости движения зонда. Снимается разрешающий потенциал с второго выхода узла. Выдается разрешающий потенциал на первый выход узла и на второй вход первого элемента И 24, связанные с первым выходом второго триггера 27. Следующий импульс с выхода датчика 23 меток, проходя через первый элемент И 24 и первый элемент ИЛИ 26, переведет второй триггер 27 в единичное состояние Начнется фаза измерения скорости движения зонда 5. На первом выходе узла будет запрещающий потенциал, а на втором - разрешающий. Каждый импульс с выхода первого элемента ИЛИ 25 подается на вход элемента 28 задержки и на второй вход третьего элемента И 32. Если в очередной фазе корректировки количество корректирующих импульсов, поступающих на второй и третий входы узла и объединяемых вторым элементом ИЛИ 30, которые суммируются первым счетчиком 29, не превышает заданного значения, то ни в одном из разрядов этого счетчика, контролируемых третьим элементом ИЛИ 31, не содержится единиц. Поэтому на выходе третьего элемента ИЛИ 31 в этом режиме формируется запрещающий потенциал. Если же скорость движения зонда 5 существенно отличается от требуемой, то сумма в первом счетчике 29 такова, что имеются единицы в старших его разрядах,, и на выходе третьего элемента ИЛИ 31 появляется разрешаюи 1й потенциал. Третий элемен И 32 в этом случае пропускает импуль с первого входа на обнуляющий вход второго счетчика 33. Содержимое этог счетчика становится .равным нулю. Импульс с выхода элемента 28 задержки, обнуляя первый счетчик 29, подготавливает его к работе в следующей фазе корректировки. Кроме того, он передается на суммирующий вход второго счетчика 33, увеличивая его содержимое на единицу. Если сумма этого счетчика превысит заданное значение, т.е. на протяжение заданного числа фаз корректировки скорости число кор ректируюп(их импульсов будет допустим мало, появляется управляющий потенциал нэ выходе второго счетчика 33. Этим потенциалом переводится в еди610
ничное cocтoянvIe первый триггер 21. Снимается разрешающий потенциал с второго выхода первого триттера 21, а следовательно, и с четвертого выхода узла. Появляется разрешающий потенциал на первом выходе первого триггера 21, а следовательно, и на пятом выходе узла. Это напряжение является сигналом о том, что измерение
вязкости исследуемой жидкости закончено.
Узел 20 управления работает следу-, ющим образом. В начале каждого цикла
измерения скорости движения зонда 5 на третий вход узла подается импульс, который, проходя через четвертьй элемент ИЛИ 43, обнуляет третий счетчик 41 и четвертый счетчик 42, подготавливая их к работе. С четвертого входа узла подается разрешающий потенциал на третьи входы четвертого элемента И 39 и пятого элемента И 40, а разрешающий потенциал с второго входа
узла в фазе измерения скорости подается только на первый вход четвертого элемента И 39. Поступающие на второй вход этого элемента импульсы генератора 38 следуют на первые входы шестого элемента И 44 и седьмого элемента И 45. В фазе измерения первоначально запрещающий потенциал с выхода второго дешифратора 43 запирает шестой элемент И 44, а выходной потенци
ал второго элемента НЕ 51 открывает
седьмой элемент И 45. Импульсы генеатора 38, проходя через седьмой элемент И 45 и пятый элемент ИЛИ 46,поступают на суммирующий вход четвертого счетчика 42,каждый раз увеличивают значение его суммы на единицу,Это продолжается до тех пор пока во всех разрядах четвертого счетчика 42 не окажутся единицы. Это вызовет появление разрешающе- го потенциала на выходе второго дешифратора 42,которым откроется шестой элемент И 44 .Инвертированный вторым элементом НЕ 51 этот потенциал запирает седьмой элемент И 45. Импульсы гене- ратора 38 с этого момента поступают только на суммирующий вход третьего счетчика 41. Как только произойдет переполнение и этого счетчика, импульс на его первом выход вызывает срабатывание второго формирователя 34, выходной импульс которого имеет требуемо большую длительность. Этот импульс усиливается усилителем 37 ощности и выдается на первый выход
узла. Одновременно этим импульсом обнуляются третий счетчик 41 и четвертый счетчик A3. Если потенциалы на первом и втором входе узла не изменяются, то в рассматриваемом режи- ме вторым формирователем 34 может быть вьщано несколько импульсов, которыми обеспечивается ускоренный поворот рамы 1 в начале измерения.
Фаза корректировки скорости в узл 20 управления проявляется прежде всего в том, что на втором входе узла появляется запрещающий потенциал, а на первом входе - разрешающий. Импульсы генератора 38 проходят через открываюид йся в этом режиме разреша- ,ю1цим потенциалом с первого входа узла пятый элемент И 40. Проводится анализ суммы, накопленнор в третьем счетчике 41 и четвертом счетчике 42, в фазе измерения скорости движения зонда 5. Если скорость движения зонда 5 чрезмерно большая, то за промежуток времени между сменами потенциалов на первом и втором входах узла (за -время фазы измерения скорости движения зонда 5) не все разряды четвертого счетчика 42 будет иметь единицы. На выходе второго дешифратора 48 останется запрещающий потенциал. После инвер- тирования вторым элементом НЕ 50 он открывает девятый элемент И 52. Импульсы генератора 38 через открытый в этом режиме пятый элемент И 40 подаются на второй вход девятого эле- мента И 52 и следуют далее на второй вход компаратора 35 и третий выход узла. На выходе компаратора 35 этот импульс растягивается по длительности до слияния с возможным следующим импульсом с помощью интегратора 55, выходной импульс которого усиливается усилителем 37 мощности и выдается на
1. Измеритель вязкости жидкости, содержар ;ий раму, на которой закреплены оси вращения первого и второго роликов, зонд, закрепленный на гибком зондопроводнике, огибающем первый и второй ролики, первый и второй электродвигатели и программное реле, отличающийся тем что, с целью повьш1ения точности измерения за счет обеспечения равномерного и прямолинейного движения зонда при измерении, в него введены регулятор наклона рамы, вход которого подключе к первому выходу программного реле и входу реле, первьш выход - к входном контакту нормально разомкнутых контактов реле, а второй выход - к первому выходу измерителя, входной- контакт нормально замкнутых контактов
первый выход узла. Полярность этого импульса такова, что вызывает, в ко- 45 первьш концевой выключа- нечном счете, уменьшение наклона рамы ь соединен с вторым выходом прог- 1 и снижение скорости движения зонда
раммного реле, а выходные контакты реле подключены к первому электродвигателю и электромагниту, третий выход программного реле через второй концевой выключатель соединен с вторым электродвигателем, на валу которого закреплен третий ролик, ось первого электродвигателя кинематически связана с осью рамы и осью преобразователя вал - код, выход которого соединен с вторым выходом измерителя, второй ролик вьшолнен подвижным и находится под воздействием пружины, а стрелка
5. Процесс вьщачи импульсов на компаратор 35 и на третий выход узла продолжается до заполнения единицами всех разрядов четвертого счетчика 42. После этого появляется разрещаищий потенциал на выходе второго дешифратора 42 и запрещающим потенциалом с второго элемента НЕ 50 запирается девятый элемент И 52.
Если же скорость движения зонда 5 меньше требуемой, то за время фазы
измерения движения зонда 5 заполняются е;ишидами все разряды четвертого счетчика 42 и часть разрядов третьего счетчика 41 (именно эта сумма и сви/1етельствует о недостаточной скорости движения зонда 5). На выходе первого дешифратора 47 формируется запрещающий потенциал. Разрешающим потенциалом с выхода первого элемента НЕ 49 открывается восьмо элемент И 51. Импульсы генератора 38 передаются через него на второй вход компаратора 35 и на третий выход узла. На вькоде компаратора 35 появляются импульсы, полярность которых соответствует увеличению наклона рамы 1 и увеличению скорости движения зонда 5. Иьшульсы растягиваются интегратором 36 и усиливаются усилителем 37 мощности, после чего вьщаются на первый выход узла.
.Формула изобретения
1. Измеритель вязкости жидкости, содержар ;ий раму, на которой закреплены оси вращения первого и второго роликов, зонд, закрепленный на гибком зондопроводнике, огибающем первый и второй ролики, первый и второй электродвигатели и программное реле, отличающийся тем что, с целью повьш1ения точности измерения за счет обеспечения равномерного и прямолинейного движения зонда при измерении, в него введены регулятор наклона рамы, вход которого подключен к первому выходу программного реле и входу реле, первьш выход - к входному контакту нормально разомкнутых контактов реле, а второй выход - к первому выходу измерителя, входной- контакт нормально замкнутых контактов
первьш концевой выключа- ь соединен с вторым выходом прог-
первьш концевой выключа- ь соединен с вторым выходом прог-
раммного реле, а выходные контакты реле подключены к первому электродвигателю и электромагниту, третий выход программного реле через второй концевой выключатель соединен с вторым электродвигателем, на валу которого закреплен третий ролик, ось первого электродвигателя кинематически связана с осью рамы и осью преобразователя вал - код, выход которого соединен с вторым выходом измерителя, второй ролик вьшолнен подвижным и находится под воздействием пружины, а стрелка
рамы расположена над шкалой измерителя .
2. Измеритель по ii.l, отличающийся тем, что регулятор наклона рамы содержит узел aHaJtHsa и узел управления, причем первьп вход узла анализа и первьй выход узла управления соединены с входом и первым выходом регулятора соответственно, первый, второй, третий, четвертыйУО ватель, третий и четвертый счетчики.
и пятый выходы узла анализа соединены с первым, вторым, третьим, четвертым входами узла управления и вторым выходом регулятора соответственно, а второй и третий выходы узла управления соединены с вторым и третьим входами узла анализа соответственно. 3. Измеритель по пп. 1 и 2, отличающийся тем, что узел анализа содержит, первый формирователь, датчик меток, первый, второй и третий элементы И, первый, второй и третий элементы ИЛИ, первый и второй триггеры, первый и второй счетчипервый и второй дешифраторы, первый и второй элементы НЕ, компаратор, . интегратор и усилитель мощности, причем первые входы четвертого и пятого
5 элементов И соединены с вторым и первым входами узла соответственно, первый и второй входы и выход четвертого Э1темента ИЛИ соединены с третьим входом узла, выходом второго формирова20 теля, выходом интегратора и входом усилителя мощности и обнуляющими входами третьего и четвертого счетчиков соответственно, выход генератора подключен к вторым входам четвертого и
ки, причем вход и выход первого фор- 25 пятого элементов И, третьи входы комирователя соединены с первым входом узла и с первыми входами первого элемента ИЛИ и первого триггера соответственно, первьш и второй входы и выход второго элемента ИЛИ соединены с вторым и третьим входами узла и суммирующим входом первого счетчика соответственно, первый, второй входы и выход первого элемента И соединены с выходом
датчика меток и первым входом второго 35 мента ИЛИ и группой входов второго элемента И, первым выходом второго дешифратора соответственно, вход пер- триггера и первым выходом узла и вторым входом первого элемента ИЛИ соответственно, второй выход и первый и
вого элемента НЕ соединен с выходом первого дешифратора, первый и второй входы шестого элемента ,И соединены
второй входы второго триггера соеди- 40 с первым входом седьмого элемента И
нены с вторым выходом узла и вторым входом второго элемента И, выходом первого элемента ИЛИ, входом элемента задержки, первым входом третьего элемента И и третьим Бькодом узла и 45 выходом второго элемента И соответственно, второй вход и первый и второй выходы первого триггера соединены с выходом второго счетчика и с четвертым и пятым выходами узла соответ-50 тьего счетчика и первым входом комственно, обнуляю1ций вход и группа выходов первого счетчика соединены с выходом элемента задержки и суммиру- входом второго счетчика и группой входов третьего элемента ИЛИ со- ответственно, второй вход и выход третьего элемента И соединены с выхоа
131884614
дом третьего элемента ИЛИ и обнуляющим входом второго счетчика соответственно.
4. Измеритель по пп. 1 и 2, о т - 5 л и ч а ю щ и и с я тем, что узел управления содержит генератор, чет- вертьш, пятый, шестой, седьмой, восьмой и девятый элементы И, ч.етвертый и пятьш элементы ИЛИ, второй формиройУО ватель, третий и четвертый счетчики.
первый и второй дешифраторы, первый и второй элементы НЕ, компаратор, . интегратор и усилитель мощности, причем первые входы четвертого и пятого
элементов И соединены с вторым и первым входами узла соответственно, первый и второй входы и выход четвертого Э1темента ИЛИ соединены с третьим входом узла, выходом второго формирователя, выходом интегратора и входом усилителя мощности и обнуляющими входами третьего и четвертого счетчиков соответственно, выход генератора подключен к вторым входам четвертого и
пятого элементов И, третьи входы которых соединены с четвертым входом узла, суммирующий вход, первый выход и вторая группа выходов третьего счетчика соединены с выходом шестого элемента И, входом второго формирователя и группой входов первого дешифратора соответственно, суммирующий вход и группа выходов четвертого счетчика соедипрны с выходом пятого элемента ИЛИ и группой входов второго дешифратора соответственно, вход пер-
вого элемента НЕ соединен с выходом первого дешифратора, первый и второй входы шестого элемента ,И соединены
и выходом четвертого элемента И и выходом второго дешифратора и входом второго элемента НЕ соответственно, выход усилителя мощности подключен к nepBovty выходу узла, второй вход и выход восьмого элемента И соединены с выходом пятого элемента И и вторым входом девятого элемента И и вторым выходом узла, вычитающим входом трепара тора соответственно, первый и второй входы пятого элемента Ш1И соединены с выходом седьмого элемента И и третьим выходом узла и вторым входом компаратора соответственно, выход компаратора подключен к входу интегратора.
.З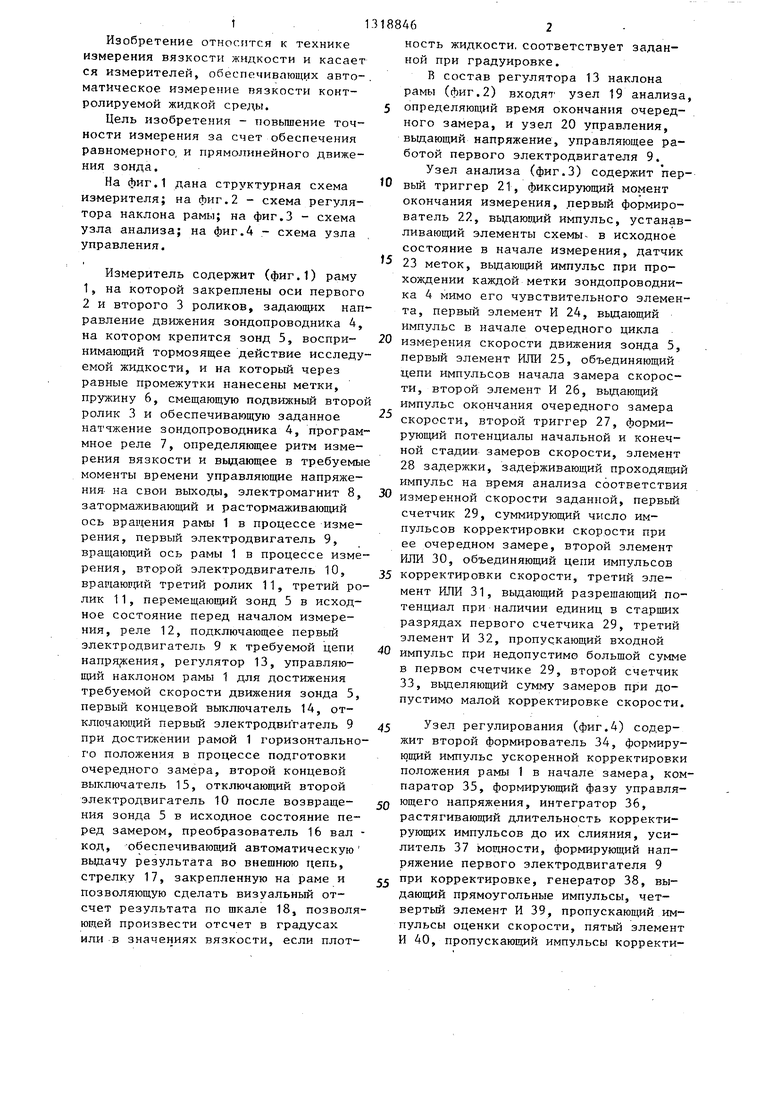


| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель вязкости жидкости | 1988 |
|
SU1627918A2 |
| Датчик параметров жидкости | 1983 |
|
SU1124200A2 |
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1990 |
|
RU2024909C1 |
| Измеритель плотности жидкостей | 1988 |
|
SU1670531A2 |
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1988 |
|
RU2022320C1 |
| ИЗМЕРИТЕЛЬ УРОВНЯ ЖИДКОСТИ И УРОВНЯ ПЕНЫ НАД ЕЕ ПОВЕРХНОСТЬЮ | 1993 |
|
RU2054632C1 |
| Измеритель плотности жидкостей | 1990 |
|
SU1805333A1 |
| Измеритель вязкости жидкости | 1990 |
|
SU1822939A1 |
| Датчик параметров жидкости | 1986 |
|
SU1408301A1 |
| Устройство для определения готовности шлихты | 1989 |
|
SU1654727A1 |


Изобретение относится к измерению реологических характеристик жидких сред. Цель изобретения - повышение точности измерений эа счет обеспечения равномерного и прямолинейного движения зонда 5 в процессе измерения. Зонд 5 движется по линии, наклон которой изменяется для достижения заданной скорости с помощью регулятора 13 наклона рамы 1. Обеспечена полная автоматизация процесса измерителя за счет работы программного реле 7 и введенных первого 14 и второго 15 концевьгх выключателей, электромагнита 8 и реле 12. Регулятор 13 содержит узлы анализа и управления, обеспечивающие измерение и корректировку скорости движения зонда. Возможны и визуальный отсчет измеренной величины и ее автоматическое дистанционное считывание через преобразователь вал - код 16. 3 з.п. ф-лы, 4 ил. с IS заЛ. 00 Фиг.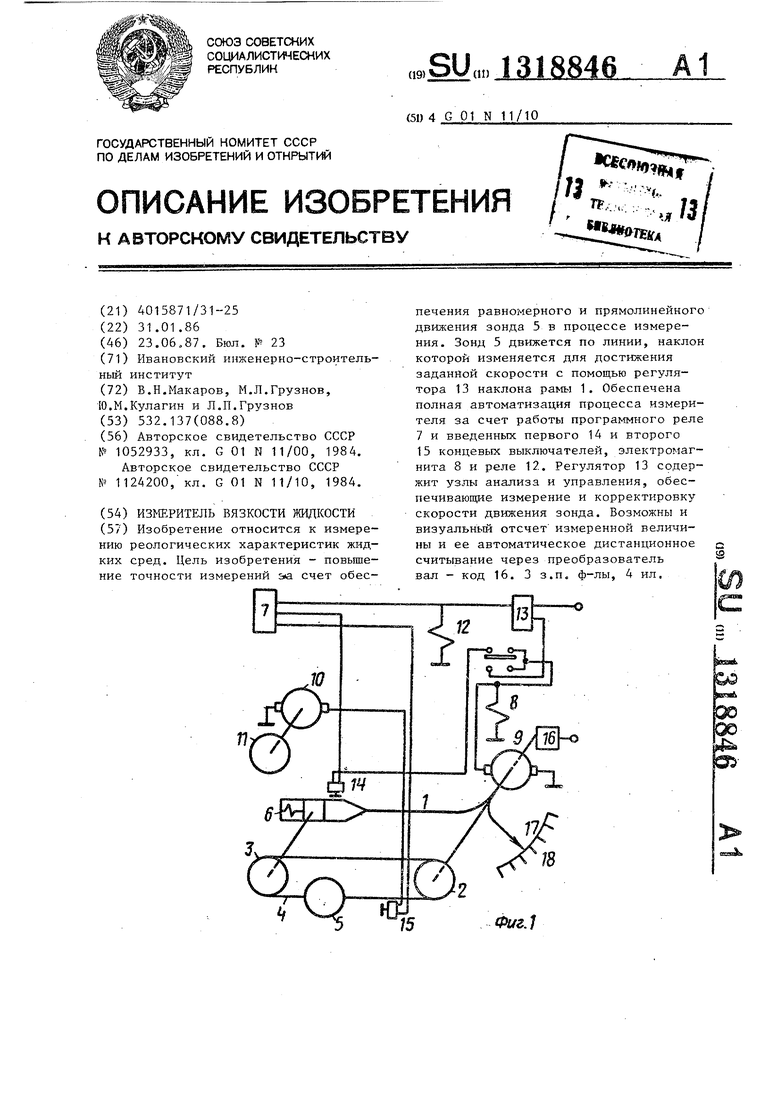
Редактор С.Пекарь
Составитель В.Вощанкин
Техред А.Кравчук Корректор, А.Зимокосов
Заказ 2500/34Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Датчик параметров жидкости | 1980 |
|
SU1052933A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик параметров жидкости | 1983 |
|
SU1124200A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
