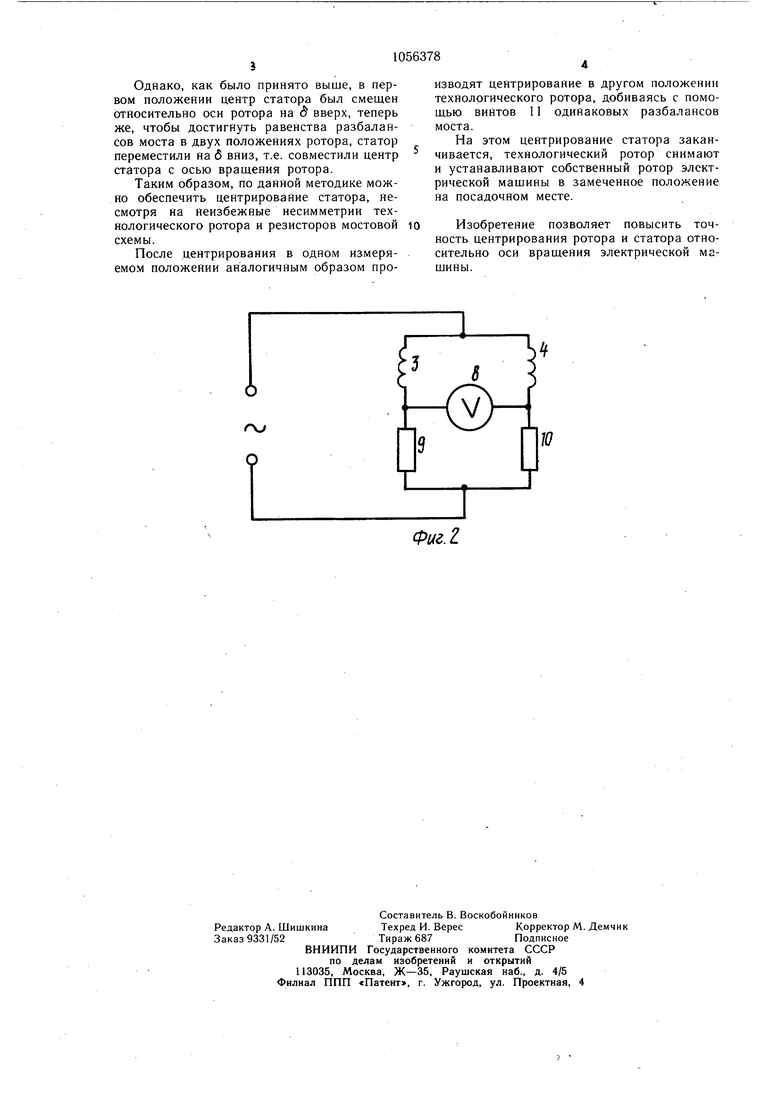
Изобретение относится к технологии центрирования ротора и статора, относительно оси вращения электрической машины и может быть использовано в электротехнической промьпиленности. Известен способ центрирования ротора и статора относительно оси вращения электрической машины путем обеспечения жестких технологических допусков при сборке электрической машины 1. Недостатком этого способа является высокая трулоемкость изготовления деталей электрической машины, используемых при центрировании ротора. Известен также способ центрирования ротора и статора относительно оси вращения электрической машины, включающий установку технологического ротора с размещенной на нем измерительной индуктивной катушкой, соединенной с мостовой измерительной схемой, установку статора и центрирозание его относительно технологического ротора путем поворота технологического ротора и измерения величины погрещности рабочего зазора 2. Однако известный способ характеризуется недостаточной точностью центрирования из-за влияния на измерение погрешностей рабочего зазора отклонений геометрической формы технологического ротора. Целью изобретения является повыщемие точности центрирования за счет исключения влияния отклонений геометрической формы технологического ротора на измерение погрешностей рабочего зазора. Поставленная цель достигается тем, что согласно способу центрирования ротора и статора относительно оси вращения электрической машины, включающему установку технологического ротора с размещенной на нем измерительной индуктивной катущкой, соединенной с мостовой измерительной схемой, установку статора и центрирование его относительно технологического ротора пу.тем поворота технологического ротора и измерения величины погрешности рабочего зазора, на технологический ротор устанавливают дзе диаметрально-противоположно расположенные измерительные индуктивные катушки, в каждом измеряемом положении технологический ротор поворачивают на 180°, после чего перемещают статор относительно технологического ротора в радиальном направлении до получения в измерительной схеме значения разбаланса моста, соответствующего половине разницы измеренных величин. На фиг. 1 показана установка статора электрической машины относительно технологического ротора; на фиг. 2 - мостовая измерительная схема. Способ центрирования ротора и статора относительно оси вращения электрической машины осуществляется следующим образом. Вначале на посадочное место устанавливают ротор электрической машины, и с помощью механизма 1 регулирования биейия ротора доводят биение ротора до минимальной величины. В этом положении механизм 1 фиксируют, замечают положение проверяемого ротора на посадочном месте и снимают его, а на замеченное посадочное место устанавливают технологический ротор 2 и включают измерительные индуктивные катущки 3 и 4 в мостовую измерительную схему. Статор 5 устанавливают в гнездо в раме 6. Технологический ротор 2 устанавливают в такое положение, чтобы оси измерительных индуктивных катушек 3 и 4 совпали с одним из направлений радиального перемещения статора. Тогда винтами 7 перемещают статор до получения минимального показания вольтметра 8, который измеряет рассогласование моста. Если бы биение ротора было сведено к нулю, индуктивные датчики имели совершенно одинаковые параметры, резисторы в мостовой схеме были идентичны, то минимальное показание вольтметра 8 соответствовало бы равенству рабочих зазоров над катушками 3 и 4, т.е. совпадению центра статора с осью вращения ротора. В реальном технологическом роторе имеет место биение, измерительные индуктивные катущки не .могут быть одинаковыми из-за потоков рассеяния, неоднородности магнитной системы, и т.д., а резисторы 9 и 10 могут быть неидентичны из-за допуска на их сопротивление. Поэтому при минимальном разбалансе моста может иметь место смещение центра статора. Чтобы исключить это. смещение, делают второе измерение разбаланса моста, повернув ротор на 180° относительно положения первого замера, и в этом положении ротора производят.регулировку винтами 7 статора до уменьшения разницы между первым и вторым замерами разбаланса моста наполовину. Например, если за счет биения технологического ротора минимальный разбаланс моста дУо в первом положении ротора был получен при смещении центра статора относительно оси вращения на величину S вверх, тогда при повороте ротора на 180° зазор над датчиком 3 на величину 2 меньше, чем над датчиком 4. Обозначив через р чувствительность моста, т.е. величину разбаланса моста при перемещении статора на 1 мкм. Тогда разбаланс моста во втором положении ротора составляет - AUo + Для уменьшения разницы AUieo и AUo наполовину необходимо в данном примере переместить статор на величину 5 вниз, тогда получим AUiso AUo + 5p Если теперь повернуть ротор в первое положение, то получим AUo дУо + бр.
Однако, как было принято выше, в первом положении центр статора был смещен относительно оси ротора на д вверх, теперь же, чтобы достигнуть равенства разбалансов моста в двух положениях ротора, статор переместили на 6 вниз, т.е. совместили центр статора с осью вращения ротора.
Таким образом, по данной методике можно обеспечить центрирование статора, несмотря на неизбежные несимметрии технологического ротора и резисторов мостовой схемы.
После центрирования в одном измеряемом положении аналогичным образом производят центрирование в другом положении технологического ротора, добиваясь с помощью винтов 11 одинаковых разбалансов моста.
На этом центрирование статора заканчивается, технологический ротор снимают и устанавливают собственный ротор электрической мащины в замеченное положение на посадочном месте.
Изобретение позволяет повысить точность центрирования ротора и статора относительно оси вращения электрической мащины.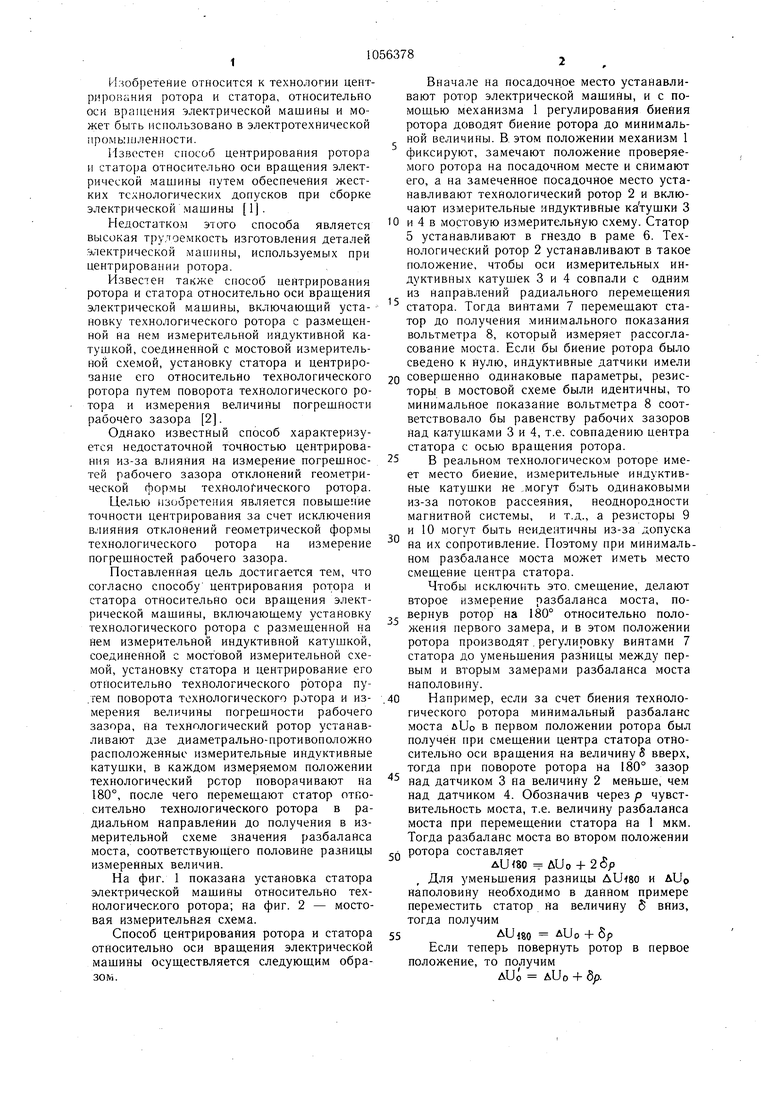
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для контроля несимметрии расположения зубцов магнитопровода электрической машины | 1987 |
|
SU1472854A1 |
| Устройство для измерения магнитной асимметрии статоров и роторов электрических машин | 1984 |
|
SU1322211A1 |
| Двухкоординатный датчик углов наклона | 1990 |
|
SU1783291A1 |
| Датчик угловых перемещений | 1990 |
|
SU1809296A1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| Устройство для измерения магнитнойАССиМЕТРии CTATOPOB и РОТОРОВэлЕКТРичЕСКиХ МАшиН | 1978 |
|
SU796780A1 |
| Шестикомпонентные аэродинамические весы | 1961 |
|
SU152117A1 |
| Бесконтактный электромагнитный датчик для измерения крутящего момента, передаваемого вращающимся валом | 1960 |
|
SU148932A1 |
| Устройство для индикации направления вращения | 1976 |
|
SU591775A1 |
| Устройство для определения плановых смещений точек оборудования | 1972 |
|
SU436978A1 |
СПОСОБ ПЕНТРИРОВАНИЯ РОТОРА И СТАТОРА ОТНОСИТЕЛЬНО ОСИ ВРАЩЕНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ, включающий установку технологического ротора с размещенной на нем измерительной индуктивной катушкой, соединенной с мостовой измерительной схемой. Зг установку статора и центрирование его относительно технологического ротора путем поворота технологического ротора и измерения величины погрещности рабочего зазора, отличающийся тем, что, с целью повышения точности центрирования за счет исключения влиияния отклонений геометрической формы технологического ротора на измерение погрешностей рабочего зазора, на технологический ротор устанавливают две диаметрально противоположно расположенные измерительные индуктивные катушки, в каждом измеряемом положении технологический ротор поворачивают на 180°, после чего перемещают статор относительно технологического ротора в радиальном направлении до получения в измерительной схеме значения разбаланса моста, 5 соответствующего половине разницы измеренных величин.. СП О5 со оо
О
Фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Технология производства асинхронных двигателей | |||
| Под ред | |||
| В | |||
| Г | |||
| Костромина | |||
| М., «Энергоиздат, 1981, с | |||
| Приспособление для подачи воды в паровой котел | 1920 |
|
SU229A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для измерения магнитной асимметрии поверхностей статора и ротора электрических машин | 1960 |
|
SU132321A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
