Изобретение относится к приборостроению и может использоваться при создании бескарданных гироскопов на сферической шарикоподшипниковой опоре, которые могут применяться, например, в качестве чувствительных элементов гиростабилизаторов или двухканальных измерителей угловой скорости.
Известен гироскоп [1], содержащий корпус, гиромотор, карданов подвес, датчики угла и датчики момента, повернутые относительно друг друга на 90° вокруг продольной оси гироскопа.
Основным недостатком данного гироскопа является наличие карданова подвеса, что обуславливает значительный дрейф гироскопа из-за необходимости применения токоподводов для подачи электропитания на обмотки гиромотора, датчиков угла и датчиков момента и шарикоподшипников - для обеспечения вращения рамок карданова подвеса.
Наиболее близким по технической сущности к заявленному устройству является гироскоп [2], содержащий корпус с герметично закрывающейся крышкой, гиромотор, ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента. Статор гиродвигателя состоит из двух шихтованных пакетов, разделенных между собой немагнитным элементом, и обмотки, витки которой охватывают оба пакета. Обмотка гиродвигателя, кроме основной своей функции (создание вращающегося магнитного поля, приводящего во вращение ротор), выполняет функцию первичной обмотки трансформаторно-индуктивного датчика угла. Вторичные обмотки датчиков угла намотаны раздельно на каждом пакете, причем каждая пара обмоток геометрически сдвинута относительно друг друга на 90°, что позволяет производить измерения по двум осям. При симметричном расположении гистерезисного кольца ротора относительно пакетов статора в обмотках датчиков угла будет наводиться одинаковая по величине ЭДС. При смещении этого кольца в какую-либо сторону величина наводимых ЭДС в обмотках датчиков угла будут различными. Датчики момента конструктивно выполнены аналогично с датчиками угла и геометрически сдвинуты относительно них на 90°.
Недостатком данного гироскопа являются: его низкая точность измерения полезного сигнала, вызванная наличием помех, создаваемых работой гиродвигателя из-за вихревых токов в результате использования гистерезисного кольца ротора в качестве подвижного элемента (ротора) датчиков угла; ограниченный диапазон измеряемых угловых скоростей (из-за малого плеча датчик момента - подвижный элемент); невозможность проводить коррекцию дрейфа гироскопа, зависящего от момента вращения электромагнитного поля, создаваемого статором, так как в данном случае гистерезисное кольцо должно быть размагничено и не может являться подвижным элементом (ротором) датчиков угла и датчиков момента [3].
Целью изобретения является улучшение точностных параметров гироскопа и расширение диапазона измеряемых угловых скоростей.
Для достижения этого в первом варианте гироскопа, содержащего корпус с расположенным внутри него гиродвигателем, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, согласно изобретению, в торцевой части ротора, в качестве подвижного элемента датчиков угла и датчиков момента, жестко закреплено ферритовое кольцо прямоугольного сечения, а датчики угла и датчики момента размещены на корпусе гироскопа напротив ферритового кольца.
Второй вариант гироскопа отличается тем, что внутри ферритового кольца неподвижно закреплено стальное кольцо прямоугольного сечения.
К существенным отличиям предложенного гироскопа по сравнению с известным является введение в торцевую часть ротора жестко закрепленного ферритового кольца прямоугольного сечения, выполняющего роль подвижного элемента датчиков угла и момента, которые размещены на корпусе гироскопа напротив ферритового кольца. Существенным отличием второго варианта гироскопа является введение дополнительного стального кольца внутри ферритового.
Данные существенные отличия позволяют повысить точность гироскопа за счет устранения помех в полезном сигнале, создаваемых работой гиродвигателя, и расширить диапазон измеряемых угловых скоростей за счет увеличения плеча датчик момента - подвижный элемент.
Изобретение поясняется чертежами.
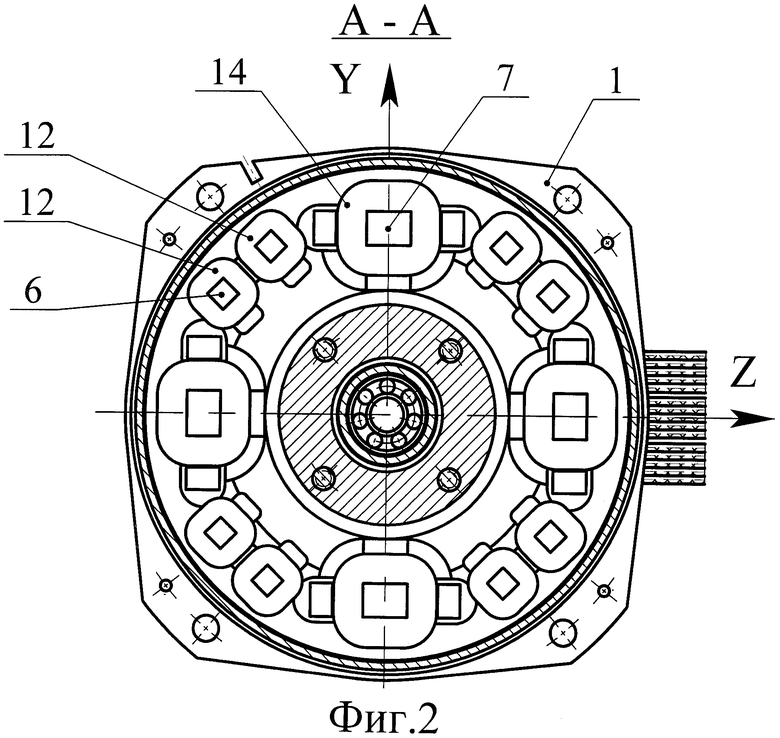
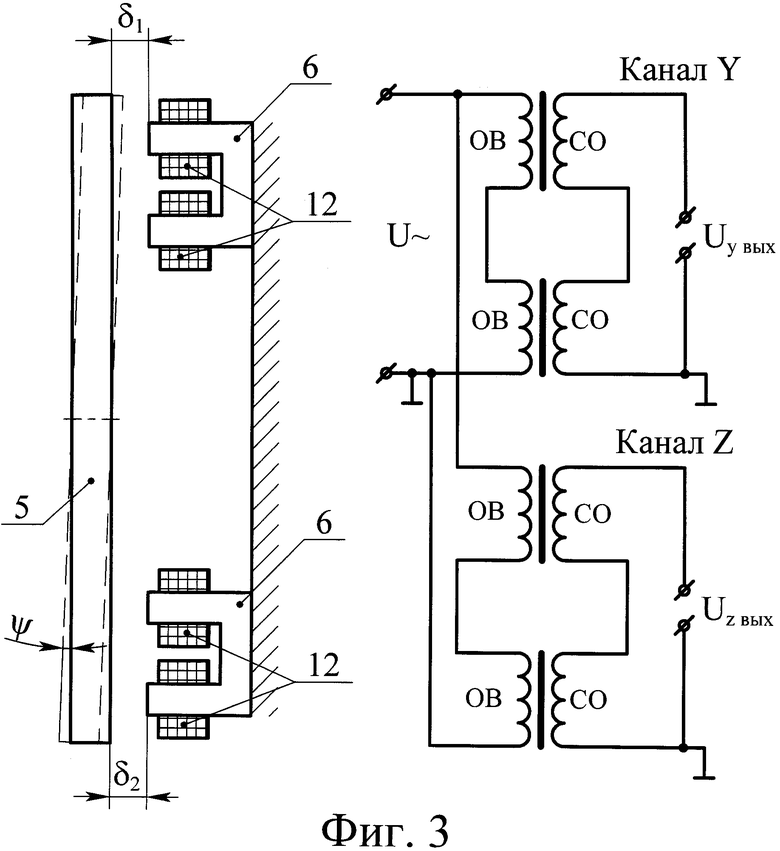
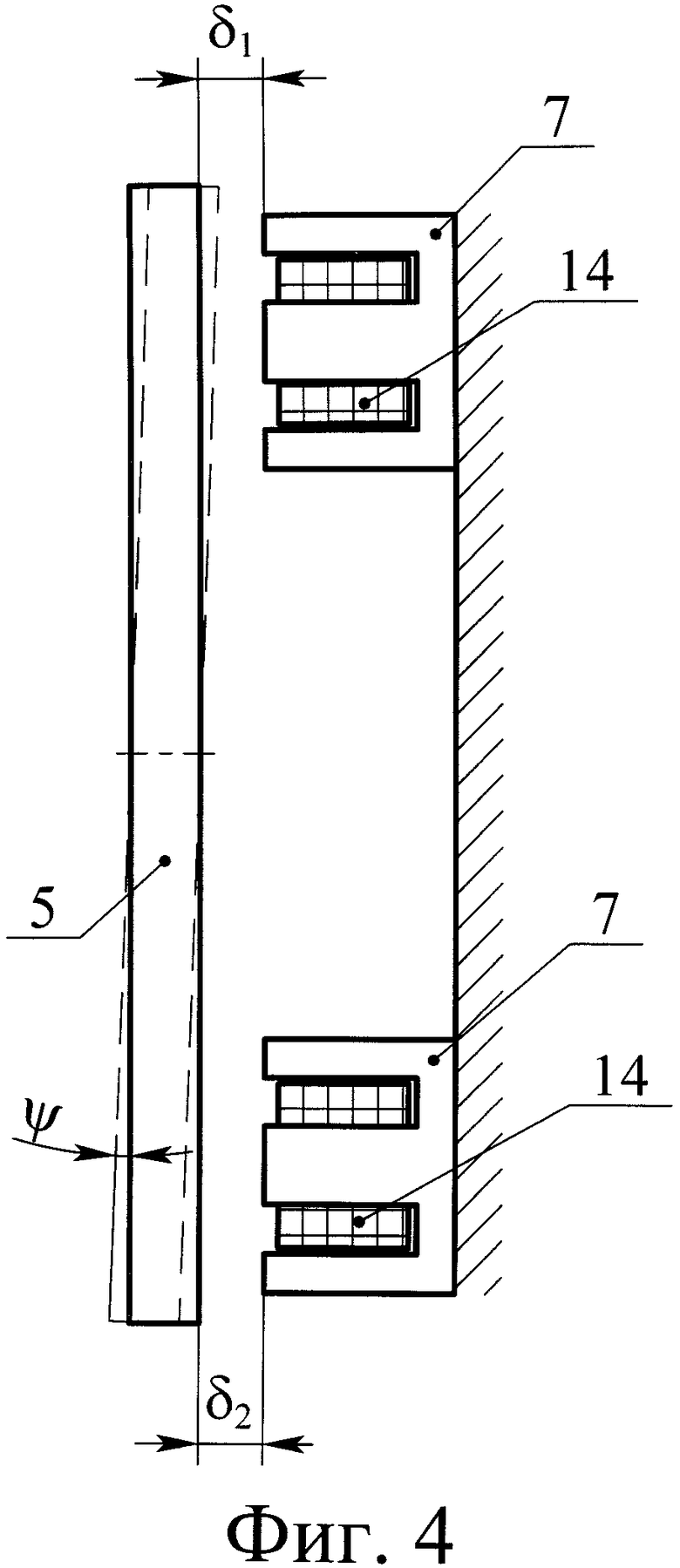
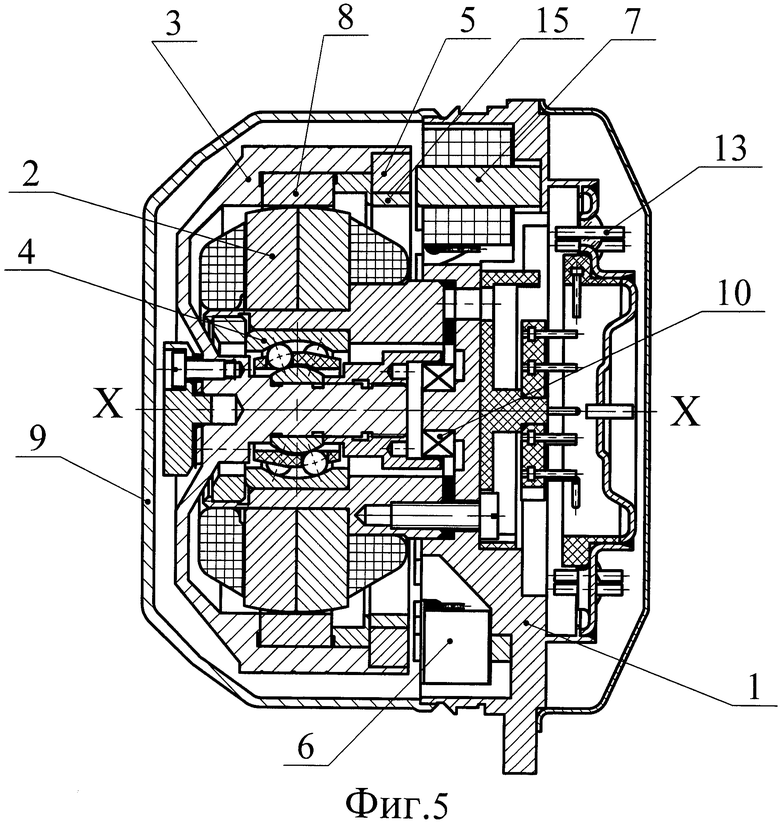
На фиг.1 представлен первый вариант предложенного гироскопа вид сбоку в разрезе; на фиг.2 - вид первого варианта в сечении по линии А-А; на фиг.3 - схема работы датчиков угла; на фиг.4 - схема работы датчиков момента; на фиг.5 - вид второго варианта предложенного гироскопа сбоку в разрезе.
В предложенной предпочтительной реализации гироскопа по первому варианту ротор 3 гироскопа (с гистерезисным кольцом 8 и ферритовым кольцом 5) имеет колокообразную форму и установлен во внутреннее кольцо сферической шарикоподшипниковой опоры 4. Сферическая шарикоподшипниковая опора 4 обеспечивает три степени свободы ротора 3, допуская неограниченный угол поворота вокруг собственной оси вращения (оси X) и ограниченные углы (±45') поворота вокруг двух других осей (Y и Z). Ротор 3 приводится во вращение гиродвигателем, статор 2 которого установлен на наружном кольце сферической шарикоподшипниковой опоры 4. Радиальный шарикоподшипник 10 выполняет роль упора и служит для ограничения углов поворота ротора 3 вокруг осей Y и Z.
Для регистрации угла поворота ротора 3 вокруг измерительных осей Y и Z предназначены датчики 6 угла, неподвижная (статорная) часть которых выполнена, например, в виде П-образного сердечника, на который надеты две одинаковые катушки 12, одна из этих катушек является обмоткой возбуждения, а вторая - сигнальной обмоткой. Датчик 6 угла по каждому каналу содержит два таких сердечника с катушками 12, расположенных диаметрально и смещенных относительно осей чувствительности гироскопа на угол 45° (фиг.2, фиг.3). Обмотки возбуждения датчика угла одного канала соединены последовательно и подключены параллельно с обмотками возбуждения датчика угла другого канала к источнику переменного тока U, например, напряжением ~8 B, частотой 11600 Гц. Сигнальные обмотки соединены по дифференциальной схеме. При таком включении обмоток происходит увеличение крутизны датчика по сравнению с другими схемами включения. При подаче напряжения питания на обмотки возбуждения датчика 6 угла на сигнальных обмотках трансформируется напряжение. Суммарная величина этого напряжения на обеих сигнальных обмотках практически не зависит от положения ротора 3 (при малых углах поворота) и выполняет роль напряжения питания мостовой схемы. Воздушные зазоры δ1 и δ2 между ферритовым кольцом 5 и сердечниками датчика 6 угла при нейтральном положении ротора 3 равны δ1=δ2, индуктивности обеих сигнальных обмоток одинаковы и мост сбалансирован.
При повороте ротора 3 относительно нейтрали, например, на угол ψ (фиг.3) указанные воздушные зазоры изменяются: для одного сердечника воздушный зазор увеличивается, а для другого - уменьшается. При этом индуктивность одной сигнальной обмотки увеличивается, а другой - уменьшается. В результате баланс моста нарушается и на выходной диагонали мостовой схемы появляется напряжение, пропорциональное удвоенному углу поворота ротора 3. Изменение направления поворота ротора 3 вызывает изменение фазы выходного напряжения на 180°, т.е. характеристика датчика 6 угла является реверсивной. Регулировка нулей датчика 6 угла осуществляется, например, смещением катушек 12 сигнальных обмоток.
Выбранная схема работы датчиков 6 угла сочетает в себе преимущества трансформаторных и индуктивных датчиков. Она не создает относительно измерительной оси момента сил сухого трения, т.к. является бесконтактной, а моменты, обусловленные силами притяжения ротора к сердечникам, направлены в противоположные стороны и поэтому почти полностью компенсируются.
Для создания управляющих моментов используются электромагнитные датчики 7 момента, работающие на постоянном токе. Конструктивно датчик 7 момента подобен датчику 6 угла и содержит по каждому каналу два, диаметрально расположенных на корпусе 1 и совмещенных с осями чувствительности гироскопа сердечника, например, из металлокерамики. На средний стержень каждого сердечника, имеющего, например, Ш-образную форму, надета катушка 14 управления (фиг.2, фиг.4). Главное достоинство электромагнитных датчиков заключается в их конструктивной и технологической простоте и возможности получения значительных по величине моментов.
Подвижным элементом (ротором), общим для датчиков 6 угла и датчиков 7 момента, является ферритовое кольцо 5, например, из материала М2000 НМ1-17 ПЯО.707.094 ТУ. Ферритовое кольцо 5 расположено в торцевой части ротора 3 и не создает помех в сигнальных обмотках датчиков 6 угла, создаваемых работой гиродвигателя.
Гироскоп закрыт кожухом 9, выполнен герметичным и заполнен гелиеводородной смесью до давления, например, 750 мм рт.ст. в целях снижения аэродинамического момента сопротивления и его влияния на дрейф гироскопа (через проекции этого момента на оси чувствительности гироскопа). Для съема и подачи электрических сигналов служат гермовводы 13.
Во втором варианте гироскопа (фиг.5) внутри ферритового кольца 5 неподвижно закреплено стальное кольцо 15, например, из материала сталь 20895 ГОСТ 11036-75. За счет чего увеличивается крутизна характеристики датчика момента и, следовательно, увеличивается измеряемая угловая скорость при работе гироскопа в условиях повышенной температуры.
Гироскоп работает следующим образом. В нулевом положении в силу симметрии выходной сигнал с датчиков 6 угла отсутствует. В режиме измерения при наличии угловой скорости, например, относительно оси Y корпус 1 гироскопа начнет разворачиваться относительно этой оси, а ротор 3 будет стремиться сохранить неизменным в инерциальном пространстве направление вектора кинетического момента. Зазоры δ1 и δ2 между ферритовым кольцом 5 и торцевыми поверхностями сердечников датчиков 6 угла изменятся и на выходе датчика 6 угла появится сигнал, амплитуда которого пропорциональна измеряемому углу, а фаза определяет знак углового перемещения. Данный сигнал электрически обрабатывается и подается в катушки датчика 7 момента по оси Z, при этом ротор 3 по правилу гироскопии будет прецессировать (поворачиваться) относительно оси Y, стремясь уменьшить до нуля рассогласование на датчике 6 угла. Мерой угловой скорости является ток в катушках датчика 7 момента. Зависимость квадратичная

где w - измеряемая угловая скорость;
к - масштабный коэффициент датчика момента;
I - ток в катушке датчика момента.
При использовании гироскопа в качестве чувствительного элемента гиростабилизатора сигнал с датчика 6 угла электрически обрабатывается и подается, например, на двигатель разгрузки гиростабилизатора. Датчик 7 момента гироскопа при этом используется либо для компенсации дрейфа гироплатформы, либо для управления при необходимости разворота гироплатформы.
Таким образом, в сравнении с прототипом использование предлагаемого устройства в качестве чувствительных элементов гиростабилизаторов или двухканальных измерителей угловой скорости обеспечивает улучшение точностных параметров и расширение диапазона измеряемых угловых скоростей.
Источники информации
1. АС СССР №431808 Трехстепенный гироскоп // МПК G01C 19/00, заявлено 26.11.1971 г.
2. Патент США №3517562, НКИ 74/5.6, МПК G01C 19/28, выдан 30.06.1970 г. (прототип).
3. Патент РФ №2410658, МПК G01M 1/34, 2009 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ГИРОСКОП | 2021 |
|
RU2771918C2 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410658C1 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572501C1 |
| СПОСОБ ИЗМЕРЕНИЙ УГЛОВЫХ ОТКЛОНЕНИЙ ВРАЩАЮЩЕГОСЯ РОТОРА ТРЕХСТЕПЕННОГО ГИРОСКОПА ОТНОСИТЕЛЬНО ЕГО КОРПУСА И СКОРОСТИ ВРАЩЕНИЯ РОТОРА | 2017 |
|
RU2698493C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2158902C1 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |
Изобретение относится к приборостроению, в частности к бескарданным гироскопам на сферической шарикоподшипниковой опоре, которые могут использоваться, например, в качестве чувствительных элементов гиростабилизаторов или двухканальных измерителей угловой скорости. Гироскоп по первому варианту содержит корпус 1, внутри которого расположен гиродвигатель, включающий статор 2 с катушками, создающими вращающееся магнитное поле, приводящее во вращение ротор 3 на сферической шарикоподшипниковой опоре 4. В торцевой части ротора 3 в качестве подвижного элемента датчиков угла и датчиков момента жестко закреплено ферритовое кольцо 5 прямоугольного сечения. Датчики 6 угла и датчики 7 момента размещены на корпусе 1 гироскопа напротив ферритового кольца 5. Во втором варианте гироскопа на внутренней поверхности ферритового кольца 5 неподвижно закреплено стальное кольцо прямоугольного сечения. Изобретение позволяет улучшить точностные параметры и расширить диапазон измеряемых угловых скоростей. 2 н.п. ф-лы, 5 ил.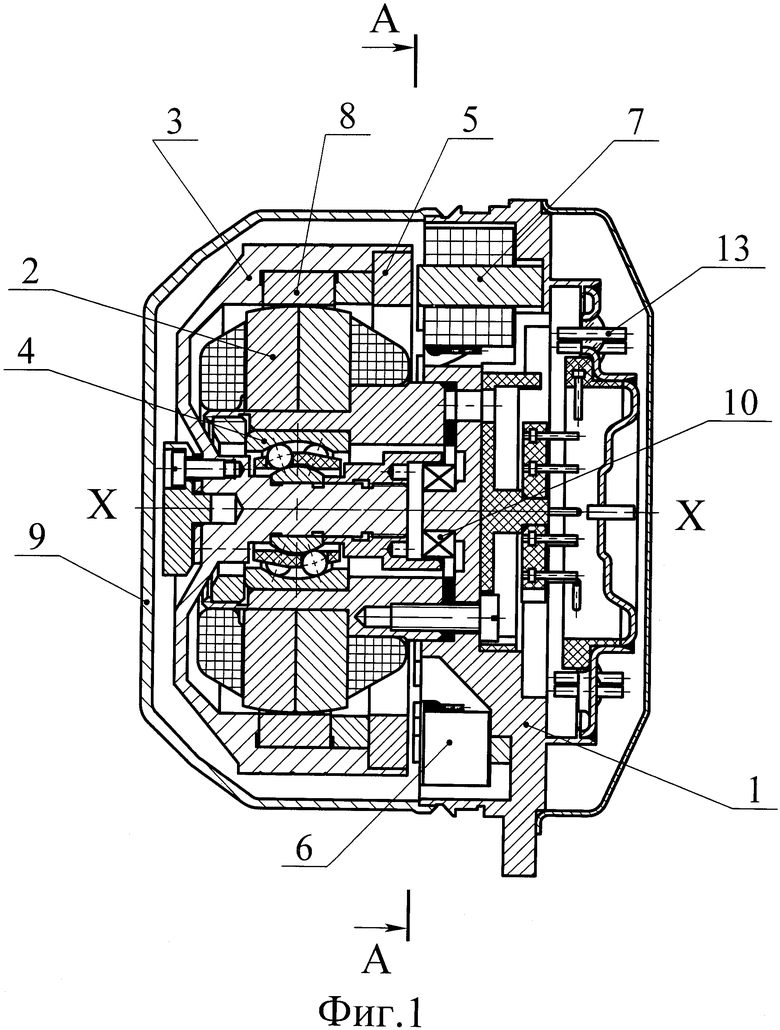
1. Гироскоп, содержащий корпус с расположенным внутри него гиродвигателем, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, отличающийся тем, что в торцевой части ротора, в качестве подвижного элемента датчиков угла и датчиков момента, жестко закреплено ферритовое кольцо прямоугольного сечения, а датчики угла и датчики момента размещены на корпусе гироскопа напротив ферритового кольца.
2. Гироскоп, содержащий корпус с расположенным внутри него гиродвигателем, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, отличающийся тем, что в торцевой части ротора, в качестве подвижного элемента датчиков угла и датчиков момента, жестко закреплено ферритовое кольцо прямоугольного сечения, внутри которого неподвижно закреплено стальное кольцо прямоугольного сечения, а датчики угла и датчики момента размещены на корпусе гироскопа напротив ферритового кольца.
| US 3517562 А, 30.06.1970 | |||
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1971 |
|
SU431808A1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| Датчик скорости на эффекте баркгаузена | 1976 |
|
SU581432A1 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410658C1 |
| Мембрана | 1974 |
|
SU1039519A1 |
| АТТРАКТАНТНЫЙ СОСТАВ ДЛЯ AGRIOTES TAURICUS HEYD (COLEOPTERA, ELATERIDAL) | 1992 |
|
RU2025066C1 |

