выполнены глухие цилиндрические отверстия, центры которых равномерно расположено по окружности на осях координат и между ними, катушки индуктивности выполнены в виде ряда плоских секций, установленных в этих отверстиях, а секции, находящиеся в отверстиях, попарно симметрично расположенных относительно координатных осей, соединены между собой последовательно-согласно.
Недостатками данного датчика являются снижение чувствительности из-за увели- чейия Иемагн ит ного зазо ра между статором и ротором, ввиду отсутствия центральных ферромагнитных полюсов в катушках индуктивности, а также остающийся значительным уровень помех, определяемых паразитной модуляцией электрического сигнала вращающимся ротором.
Наиболее близким техническим решением, выбранным в качестве прототипа, является двухкоординатный датчик углов наклона, содержащий кольцевой ротор, установленный с возможностью наклона относительно двух координатных осей, которые перпендикулярны его оси вращения, размещенный соосно с ним статор и закрепленные на его торцовой поверхности, которая обращена к ротору, Две пары расположенных диаметрально противоположно и взаимно перпендикулярно катушек индуктивности. Катушки индуктивности могут быть выполнены различной конструктивной разновидности: на двухполюсном П-образном ферромагнитном сердечнике, на круглом чашечном сердечнике с центральным полюсом и т.д. В таком датчике зазор между полюсами сердечника и плоской поверхностью ротора при центральном положении последнего составляет 0.1 ...0,2 мм.
Недостатком такого датчика является значительный уровень помех, определяемых паразитной модуляцией электрического сигнала вращающимся ротором, что связано как с неоднородностью магнитных свойств, так и с неплоскостностью торцовой рабочей поверхности кольцевого ротора. Ротора датчиков угла наклона могут иметь неоднородность магнитных свойств и неплоскостность рабочей поверхности, в связи с чем при вращении ротора будет происходить периодическое изменение величины полных сопротивлений катушек индуктивности, которое может быть представлено в виде тригонометрического ряда Фурье, в общем случае содержащего все гармоники ( v 1,2, 3, ...п). Благодаря тому, что парные катушки индуктивности, включенные в противоположные плечи мостовой измерительной схемы, расположены на статоре диаметрально
противоположно (со сдвигом по окружности на 180°), в паразитном электрическом сигнале, возникающем на нагрузке при вращении ротора, не будут содержаться
четные гармоники частоты вращения ротора ( v 2, 4, б...). Первую гармонику в паразитном сигнале убирают путем механической регулировки в составе прибора. Таким образом, в паразитном электрическом
сигнале останутся нечетные гармоники с номерами v 3, 5, 7,..(2К + 1), где К 1, 2, 3... Экспериментальные исследования гармонического состава паразитной модуляции выходного электрического сигнала реальных датчиков угла наклона показало, что наибольшую амплитуду в паразитном сигнале имеет третья гармоника частоты вращения ротора ( v 3).
Цель предлагаемого изобретения - уменьшение уровня помех, определяемых паразитной модуляцией электрического сигнала вращающимся ротором, за счет взаимной компенсации паразитных нечетных
гармоник напряжений с номерами кратными 3: v 3(2K+1) 3,9, 15...,гдеК 0, 1.2....
Это достигается тем, что в двухкоорди- натном датчике углов наклона, содержащем кольцевой ротор, установленный с возможностью наклона относительно двух координатных осей, которые перпендикулярны его оси вращения, размещенный соосно с ним Статор и закрепленные на его поверхности, которая обращена к ротору, две пары расположенных диаметрально противоположно и взаимно перпендикулярно катушек индуктивности, он снабжен двумя дополнительными парами катушек индуктивности, которые выполнены идентично катушкам
первых двух пар и смещены относительно них на угол, равный 60°.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается тем, что оно снабжено двумя дополнительными парами катушек индуктивности, которые выполнены идентично катушкам первых двух пар и смещены относительно них на угол равный 60°.
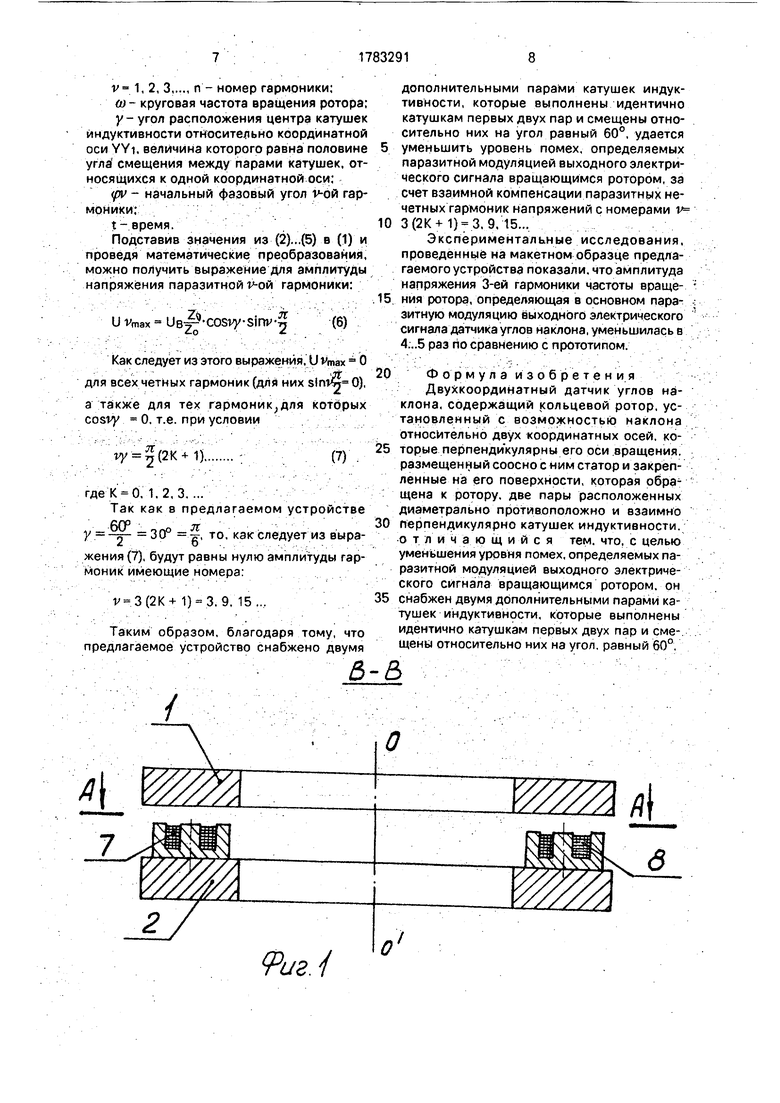
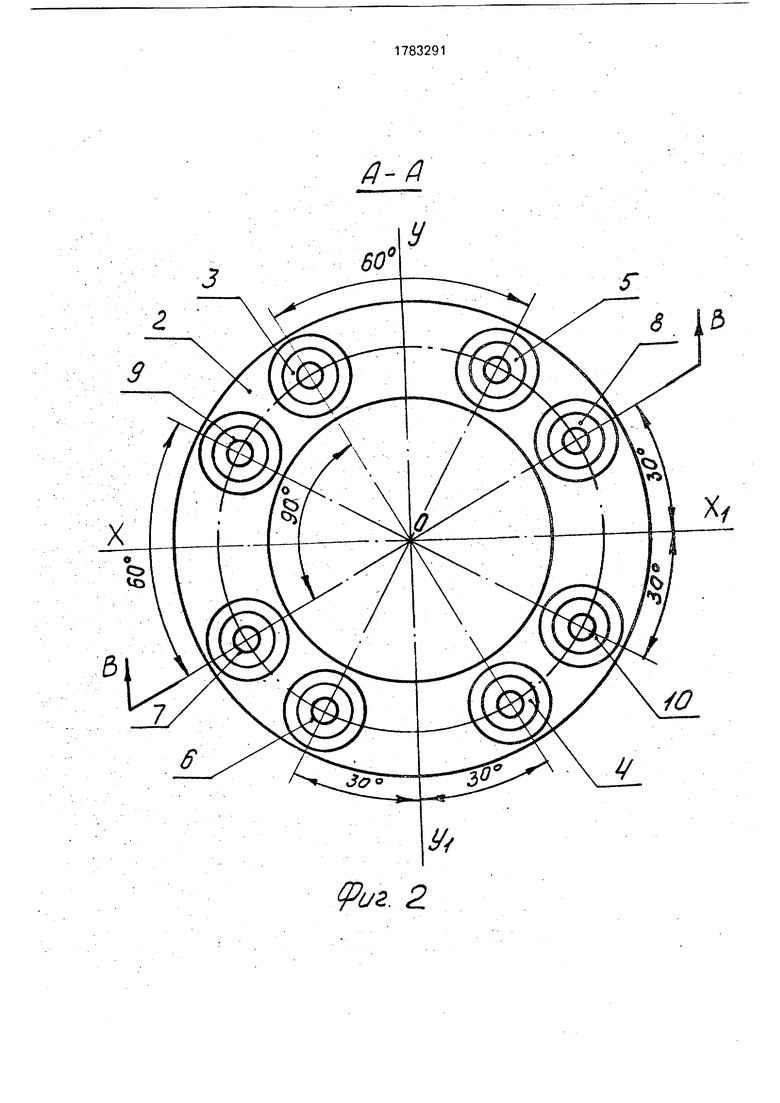
На фиг.1 схематически представлен
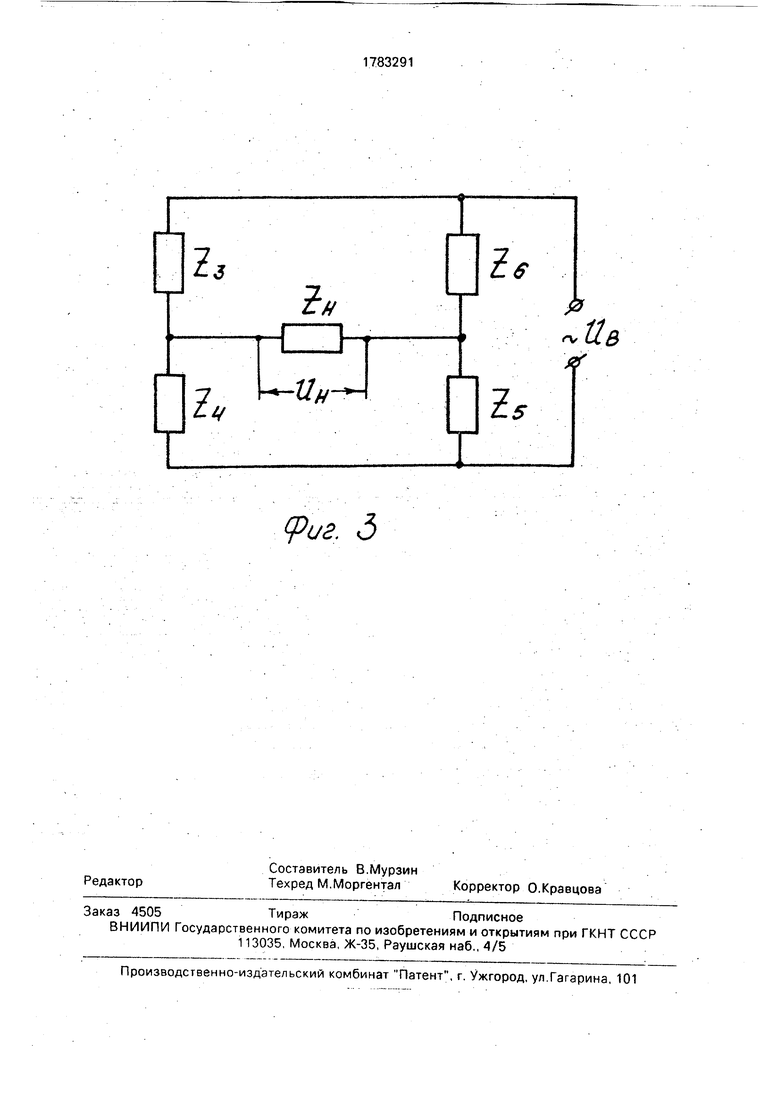
двухкоординатный датчик углов наклона, фронтальная проекция; на фиг.2 - расположение катушек индуктивности на торцовой поверхности статора; на фиг.З - мостовая дифференциальная схема для измерения углов наклона ротора относительно оси XXi.
Двухкоординатный датчик углов наклона содержит вращающийся относительно оси 001 кольцевой ротор 1, выполненный из ферромагнитного материала, установленный с возможностью наклона относительно двух координатных осей XXi и YYi, которые перпендикулярны его оси вращения, размещенный соосно с ним статор 2 и закрепленные на его торцовой поверхности, которая обращена к ротору 1, четыре пары расположенных диаметрально противоположно катушек индуктивности 3 и 4, 5 и 6. 7 и 8, 9 и 10. По каждой оси координат установлены две пары идентичных катушек индуктивности смещенные относительно друг друга на угол равный 60° и расположенные под углом ±30° относительно соответствующей координатной оси, Катушки индуктивности могут быть выполнены различной конструктивной разновидности; на двухполюсном П-образ- ном ферромагнитном сердечнике, на круглом чашечном ферромагнитном сердечнике с центральным полюсом и т.д. На фиг.1 и 2 представлен вариант датчика углов наклона с катушками индуктивности 3...10, выполненными на круглом чашечном сердечнике с центральным полюсом. На фиг.З представлен один из возможных вариантов включения катушек индуктивности в мосто- вую измерительную схему, где Za. Z4. Zs, Ze - полные электрические сопротивления соответствующих катушек индуктивности, относящихся к оси координат XXi (см. фиг.2);
2 - полное сопротивление измеритель- ной диагонали моста (сопротивление нагрузки):
UB - напряжение питания моста:
DH - напряжение на нагрузке.
Из теории мостовых схем известно, что если сопротивление нагрузки ZH велико, что чаще всего имеет место, то напряжение на нагрузке определяется по формуле
и„ ив
Z3-Z5-Z4-Z6
(Z3+Z4)-(Z5+Z6)
О)
5 10 15 20 25
0
5
0
оси XXi приводит к изменению величины индуктивности катушек. При этом немагнитные зазоры между ротором и одной из пар катушек индуктивности уменьшаются и соответственно увеличиваются немагнитные зазоры между ротором и диаметрально противоположной парой катушек индуктивности. Результатом этого является увеличение индуктивностей (и соответственно полных сопротивлений) первой пары катушек (например. Z3 и Zs) и уменьшение индуктивностей (и соответственно полных сопротивлений) второй пары катушек (например, Z-i и Ze) пропорциональные углу наклона ротора. Дифференциальное изменение индуктивностей катушек может быть измерено известными способами, например, с помощью мостовых измерительных схем, один из возможных вариантов которых представлен на фиг.З. Напряжение UH, снимаемое с измерительной диагонали моста и определяемое по формуле (1). несет полную информацию об угле отклонения ротора: его амплитуда пропорциональна углу, а фаза соответствует направлению отклонения, т.е. знаку угла.
Как уже было отмечено выше, ротора датчиков углов наклона изготовляются с определенными погрешностями - имеется неоднородность магнитных свойств и неплоскостность торцовой поверхности, в связи с чем при вращении ротора происходит периодическое (с частотой вращения) изменение величины полных сопротивлений катушек индуктивности.
При отсутствии преобразуемого углового перемещения можно представить периодически изменяющиеся при вращении ротора полные сопротивления катушек индуктивности в виде гармонического ряда Фурье:
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный датчик угла | 1979 |
|
SU838317A1 |
| Двухкоординатный датчик угла | 1985 |
|
SU1262274A1 |
| Двухкоординатный индуктивный датчик угла поворота | 1990 |
|
SU1805284A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП С ОПТИЧЕСКИМ СЧИТЫВАНИЕМ ПОЛОЖЕНИЯ ОСИ РОТОРА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ОСИ РОТОРА | 2013 |
|
RU2531060C1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК | 1971 |
|
SU294074A1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УГЛА ВРАЩАЮЩЕГОСЯ РОТОРА ГИРОСКОПА | 1979 |
|
RU2107261C1 |
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1996 |
|
RU2119146C1 |
Изобретение относится к измерительной технике и может быть использовано в устройствах измерения углов отклонения по двум координатам быстровращающихся роторов, в частности в гироприборах. Цель Изобретение относится к измерительной технике, в частности к устройствам,пре- образующим угловое перемещение в пропорциональный электрический сигнал, и может быть использовано в устройствах измерения углов наклона по двум координатам быстровращающихс ч роторов, в частности, в гироприборах. Известен двухкоординатный датчик углов наклона, содержащий неподвижный статор, закрепленные на статоре диаметрально противоположно по двум осям координат две пары катушек индуктивности, и изобретения - уменьшение уровня помех, определяемых паразитной модуляцией электрического сигнала вращающимся ротором, за счет компенсации паразитных гармоник напряжений с номерами v 3 (2К + 1) 3, 9, 15,.., в двухкоординатном датчике углов, который содержит вращающийся кольцевой ротор, установленный с возможностью поворота относительно осей, перпендикулярных его оси вращения, и неподвижный статор, на торцовой поверхности которого, обращенной к ротору, закреплены диаметрально противоположно по двум осям координат пары катушки индуктивности, центры которых попарно симметрично расположены по окружности под углом 30° относительно координатных осей. Новым в датчике углов является то, что по каждой оси координат установлены вместо одной две пары катушек индуктивности, центры которых попарно симметрично расположены по окружности под углом 30° относительно координатных осей. 3 ил. СО С вращающийся кольцевой ротор, установленный с возможностью наклона относительно осей перпендикулярных его оси вращения. Недостатками данного датчика являются значительный уровень помех, определяемых паразитной модуляцией электрического сигнала вращающимся ротором, а также плохая помехозащищенность от влияния внешних электромагнитных полей. Известен также двухкоординатный датчик углов наклона, в котором, с целью увеличения помехозащищенности, на торцовой поверхности статора, обращенной к ротору, %1 СО ы ю ю
Принцип работы двухкоординатного датчика углов наклона по каждой координате одинаков. Поэтому рассмотрим работу датчика только по одной координате, например X.
Для идеального ротора (если нет неоднородности магнитных свойств и неплоскостности) при отсутствии преобразуемого перемещения вращающегося ротора 1 относительно оси XXi. ротор расположен таким образом, что индуктивности диаметрально противоположных катушек равны, т.е. Za 7л и Zs Ze. При этом немагнитные зазоры между ротором 1 и каждой из катушек индуктивности одинаковы Как следует из формулы (1), в этом случае UH - 0 Отклонение ротора 1 от начального положения вокруг
Za Zo + $ Zv sin v(wt -y) ,... (2) X Zvsin v(wt - у + л) 4- pi }.., (3) Zs Z0 + X Zv sin + y) + ifv ... (4)
Ze Zo + Y 7v sin v(ol + у + n) + fv J, (5)
где Zo - постоянная составляющая полного сопротивления катушек индуктивности;
Zv - амплитудное значение v-ой гармоники сопротивления;
v- 1, 2, 3n - номер гармоники:
w- круговая частота вращения ротора;
у - угол расположения центра катушек индуктивности относительно координатной оси YYi, величина которого равна половине угла1 смещения между парами катушек, относящихся к одной координатной оси:
pv - начальный фазовый угол v-ой гармоники:
t- время.
Подставив значения из (2)...{5) в (1) и проведя математические преобразования, можно получить выражение для амплитуды напряжения паразитной гармоники:
U Vmax UB COSVy-Sinv™
i-Of.
(б)
Как следует из этого выражения, U Vmax О для всех четных гармоник (для них simЈ 0), а также для тех гармоник;для которых созгу 0, т.е. при условии
гГ 5(2К-М)
(7)
где К 0, 1.2,3,...
Так как в предлагаемом устройстве
сгр
у -я- - 30 , то, как следует из выражения (7), будут равны нулю амплитуды гармоник имеющие номера:
(2K+ 1)-3. 9, 15...
Таким образом, благодаря тому, что предлагаемое устройство снабжено двумя
/
А МШ
Риг. /
дополнительными парами катушек индуктивности, которые выполнены идентично катушкам первых двух пар и смещены относительно них на угол равный 60°, удается
уменьшить уровень помех, определяемых паразитной модуляцией выходного электрического сигнала вращающимся ротором, за счет взаимной компенсации паразитных нечетных гармоник напряжений с номерами v
0 3(2К+1) 3. 9, 15...
Экспериментальные исследования, проведенные на макетном образце предлагаемого устройства показали, что амплитуда напряжения 3-ей гармоники частоты враще5 ния ротора, определяющая в основном паразитную модуляцию выходного электрического сигнала датчика углов наклона, уменьшилась в 4...S раз по сравнению с прототипом.
0 Формула изобретения
Двухкоординатный датчик углов наклона, содержащий кольцевой ротор, установленный с возможностью наклона относительно двух координатных осей, ко5 торые перпендикулярны его оси вращения, размещенный соосно с ним статор и закрепленные на его поверхности, которая обращена к ротору, две пары расположенных диаметрально противоположно и взаимно
0 перпендикулярно катушек индуктивности, отличающийся тем. что, с целью уменьшения уровня помех, определяемых паразитной модуляцией выходного электрического сигнала вращающимся ротором, он
35 снабжен двумя дополнительными парами катушек индуктивности, которые выполнены идентично катушкам первых двух пар и смещены относительно них на угол, равный 60°.
то мя
б-В
т
з
&
Риг. 2
д- а
г
н
L
Vr
(риг. 3
&
ъй& #
г
| Патент США N 3354726 | |||
| кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Запальная свеча для двигателей | 1924 |
|
SU1967A1 |
| Двухкоординатный датчик угла | 1979 |
|
SU838317A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гироскопические системы: Элементы гироскопических приборов Учеб | |||
| для вузов, Под ред | |||
| Пельпора Д.С | |||
| М. | |||
| Высшая школа, 1988 | |||
| Телефонная трансляция с местной цепью для уничтожения обратного действия микрофона | 1924 |
|
SU348A1 |
