2. Привод по п. 1, отличают щ и и с я тем, что, с целью снижения потребляемой мощности, в систему управления дсгполнительно введены датчик положения участка с пониженной электропроводностью и элемент И, соединяющйй датчик натяжения кабеля с управляющим входом вьтрямителя
и. вторым входом соединенный с датчиком положения участка с пониженной электропроводностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСНАБЖЕНИЯ И УПРАВЛЕНИЯ БЕЗРЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2000 |
|
RU2185296C1 |
| Линейный асинхронный двигатель | 1980 |
|
SU917271A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2019 |
|
RU2727956C1 |
| ПОДВЕСНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1991 |
|
RU2038994C1 |
| СИНХРОННАЯ МАШИНА С ОБЩЕЙ СТУПЕНЬЮ УСТРОЙСТВА ВОЗБУЖДЕНИЯ ДЛЯ ДВИГАТЕЛЯ/ГЕНЕРАТОРА | 2015 |
|
RU2698102C2 |
| ИСТОЧНИК ПИТАНИЯ ДЛЯ ЭЛЕКТРОТЕХНОЛОГИЧЕСКИХ УСТАНОВОК | 2013 |
|
RU2520572C1 |
| Электропривод | 1975 |
|
SU597051A1 |
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
| Устройство для контроля раствора и провала контактов электромагнитного коммутационного аппарата | 1988 |
|
SU1576924A1 |
| ЛИФТ С ЭЛЕКТРОПРИВОДОМ ПОДЪЕМА ЭЛЕКТРИЧЕСКИМ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2630011C2 |
1. ПРИВОД КАБЕЛЬНОГО БАРАБА НА, содержащий Систему управления и линейный асинхронный двигатель, включающий два индуктора в виде магнитопроводов с параллельно включенньвли многофазными обмотками перемен,ного тока и дискошлй токопроводяошй вторичный элемент, отличающийся тем, что, с целью упрощения регулирования силы тяги двигателя, в систему управления введен управляемый выпрямитель и датчик натяжения кабеля, в пазах одного из индукторов установлены магнитные клинья, на которых намотана обмотка подмагничивания у вторичного элемента на радиусе размещения индукторов выполнен участок с пониженной электропроводностью, а датчик натяжения к11беля соединен с управляющим входом выпрямителя, к выходу которого подключена «в обмотка подмагничивания. (Л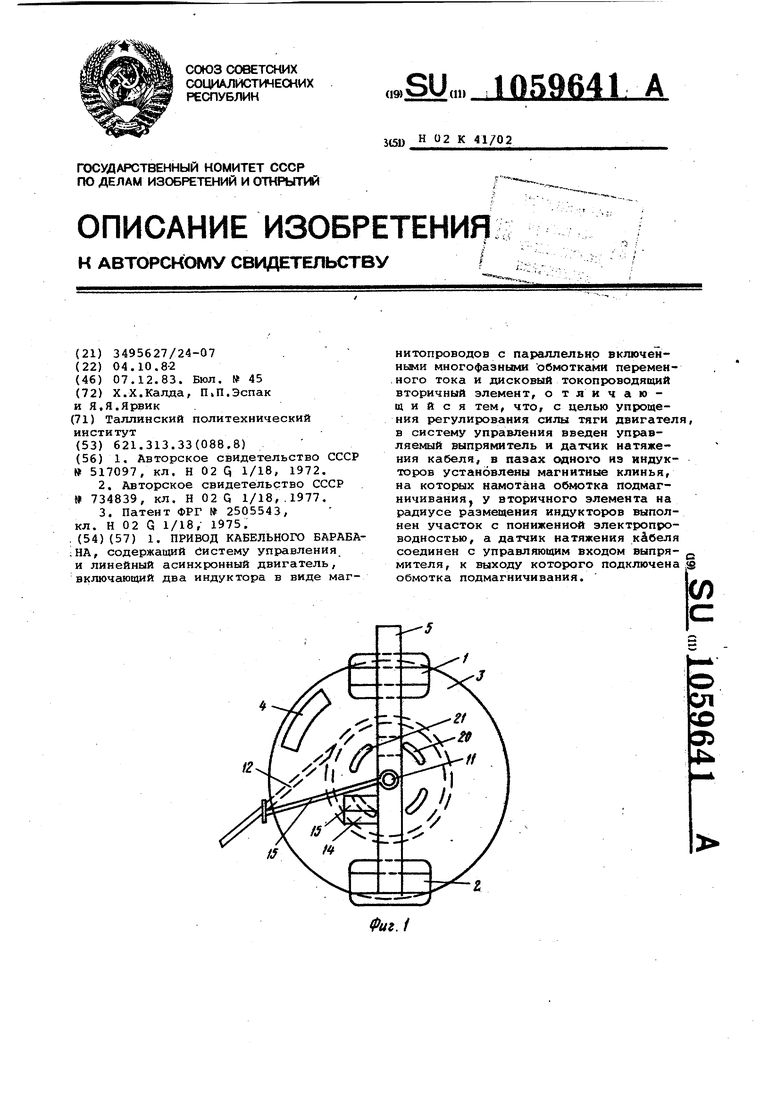
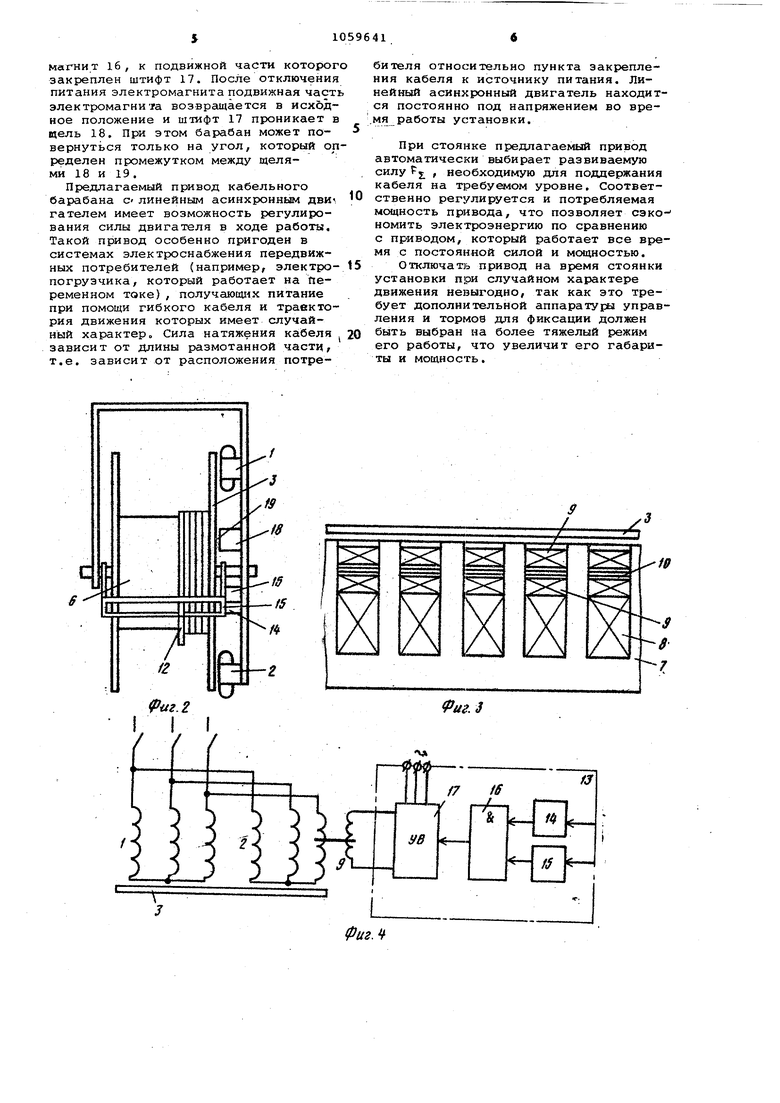
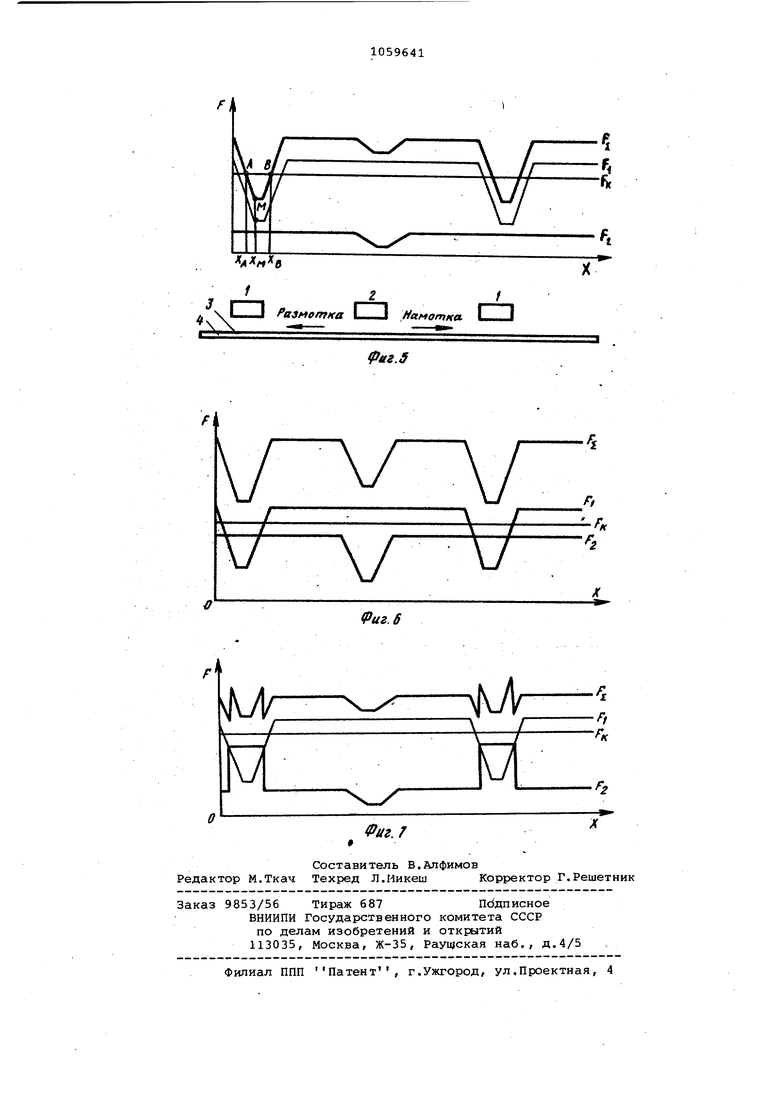
Изобретение относится к приводам кабельных барабанов и может быть использовано в электротехнике, преимущественно в системах электроснабжения подвижных электропотребителей с гибким кабелем. Известны кабельные барабаны, внут ри которых расположен двигатель, выполненный в виде подпружиненных тросов и системы блоков. Такая систе ма обеспечивает постоянное по величине натяжение кабеля l . Недостатком такого привода являет ся сложная конструкция двигателя. Известно устройство для намотки кабеля, которое содержит барабан, установленный в подишпниках на опорнсэм элементе, электропривод/ располо женный внутри барабана, основание, устройство для регулирования натяжения кабеля с конечным выключателем, связанным с электроприводом. При дви жении устройства к .питающей колонке электродвигатель и тормоз включаются в электросеть и корпус барабана, вра щаясь, наматывает кабель. При правы.шении усилия натяжения в кабеле свер : допустимого конечный выклю1атель выключается 2J . Недостатком такого привода являет ся наличие передаточной системы в виде редуктора что увеличивает массу установки. Кроме того, включение электродвигателя связано направлением движения устройства, что не поэво ляет использовать такой привод в кабельных барабанах, у которых траек тория движения имеет случайный характер. Наиболее близким по технической сущности к предлагаемому является при вод кабельного барабана, содержащий систему управления и линейный асинхронный двигатель, включающий два индуктора в виде магнитопроводов с включенньпии параллельно многофазными обмотками переменного тока и дисковый токопроводящий внутренний элемент Недостатками устройства являются отсутствие возможности регулирования момента, развиваемого двигателем, в коде работы кабельного барабана и относительно большое потребление мощности. Цель изобретения - упрощение регулирования силы тяги двигателя. Указанная цель достигается тем, что система управления привода кабельного барабана снабжена управляемые выпрямителем и датчиком натяжения кабеля, при этом в пазах одного из индукторов установлены магнитные клинья, на которых намотана обмотка подмагничивания, у вторичного элемента на радиусе размещения индукторов выполнен участок с пониженной электропроводностью, а датчик натяжения кабеля соединен с управляющим входом выпрямителя, к выходу которого подключена обмотка подмагничивания. Кроме того, привод кабельного барабана может быть дополнительно снабжен датчиком положения участка с пониженной электропроводностью и элементом И, соединяющим датчик натяжения кабеля с управляющим входом выпрямителя и вторшл входом соединен с датчиком положения участка с пониженной электропБюводностью, что позволяет меньшить потребляемую приводом мощность, На фиг, 1 и 2 представлены два вида кабельного барабана; на Фиг, 3 - разрез активной части индуктора; на фиг. 4 - силовая часть и система управления приводом; на фиг, 5 - 7 зависимости сил от положения отверстия вторичной системы по отношению к индукторам в разных режимах работы привода. Привод кабельного барабана с управляемым линейным двигателем содержит два неподвижных индуктора 1 и 2, вторичный элемент 3 с отверстием (участком с пониженной электропроводно- -,.)о. стью) 4, которые расположены на раме 5. Вторичный элемент 3 является частью кабельного барабана 6. Индукторы 1 и 2 содержат зубчаоый магнитопровод 7, трехфазную oб Joткy 8, обмотку 9 подмагничивания, катушки которой намотаны вокруг магнитных . клиньев 10, На раму 5 закреплена ось 11,вокруг нее вращается барабан б, на который наматывается кабель 12, Система управления приводом 13 (фиг. 4) содержит датчики 14 положения участка с пониженной электропроводностью и натяжения кабеля 15, логический элемент И 1б и управляемы выпрямитель 17. Фиксацию барабана осуществляет электромагнит 18 с подвижными штифтами 19 и с щелями 20 и 21. На фиг. 5-7 приведены диаграммы сил F в зависимости от координат участка с пониженной электропроводностью по отношению индукторов 1 и 2. Тут f, fl к f - силы, развиваемые первым, вторым и обоими индук торами, FK - сила натяжения кабеля. Силы F и Fj индукторов i и 2 направ лены согласно. Привод кабельного барабана работа ет следующим образом. При включении индукторов 1 и 2 в сеть (фиг. 4-и 1) создается их трехфазными обмотками бегуще.е магнитное поле, которое пронизывает щеку барабана 6 (часть из которой образует вторичный элемент J), наводит там ЭДС, токи и магиитаое поле вторичного элемента. При взаимодействии магнитного поля индукторов и вторичного элемента возникают силы F и Fj , обусловленные индукторами 1 и . JScли сила PI 2 больше, чем сила натяжения кабеля f, то барабан начинает вращаться, наматывая кабель 1 на барабан 6. Если Fj FK , то барабан не вращается, а если F Гу, , то -осуществляется размотка кабеля. Однако в предложенном приводе сила, развиваемая индукторами,зависит (фиг. 5) от положения отверстия 4 (участка с пониженной электропроводиостью) вторичного элемента по отношению к индуктору 1 и от тока управления индуктора 2. Если отверстие на ходится под индуктором 1, тогда развиваемая им сила уменьшится за счет уменьшения эквивалентной проводимост вторичной системы. В зависимости от соотношения размерюв отверстия 4 и индуктора развиваемая индуктором 1 сила может быть в пределах от О до максимальной. Сила равна нулю, если отверстие 4 полностью накроет индуктор 1, максимальная - если индуктор полностью накрыт вторичным элементом 3, т.е. отверстие 4 не находится под-индуктором. Таким образом, кабельный барабан, который может свободно поворачиваться вокруг оси 11, принимает такое положение, при котором сила индукторов FJ; равна силе натяжения кабеля PV; . При этом ток управления в обмотках подмагничивания отсутствует, и сила, развиваема индуктором 2, минимальна. На фиг. 5 представлен характер изменения сил i PI nFz/ развиваемых индукторами 1 и 2, и их сум1«ы FJ в зависимости от расстояния X края отверстия 4 в диске по отношению края индуктора при неизменной силе натяжения кабепя FII; , если ток подмагничивания индуктора 2 равен нулю. Если барабан неподвижен, тогда координата X в зависимости от величины силы FK может быть в пределах от О до Хц. - Например, при заданном (фиг. 5). При необходимости намотки кабеля 12 иа барабан 6 надо увели.чить силу индукторов FJ. Для этого служит индуктор 2. При увеличении тока в обмотке 9 подмагничивания магнитная проницаемость магнитных клиньев 10 уменьшится, поток через клин 10 уменьшается, а через воздушный зазор и вторичную систему 3 увеличится. Это приводит к увеличению развиваемой индуктором 2 силы Fj и результирующая сила Fj становится больше, чем сила натяжения Рц кабеля 12 (фиг. 6). В результате бара--;i6aH 6 начинает вращаться и производится намотка кабеля 12 на барабан 6. ;Для уменьшения биения силы F ((фиг. 5) инjцyктop 2 должен работать с повышенной силой только в интервале . Х, Хр. В остальное время целесот образно отключить ток управления индуктора 2, так как сила индукторов . Для реализадаи этого в предлагаемой системе управления привода применен датчик 14 положения участка с пониженной электропроводностью, который дает разреш ощий сигнал для включения тока управления, когда отверстие в диске находится под индуктором 1. Второй раэрешаиощий сигнал поступает в блок управления от датчика натяжения кабеля 1Ь, который сообщает о необходимости намотки кабеля. Благодаря применению элемента И (фиг. 4) ток управления включается только при наличии на выходе датчи - г. ков 14 положения и натяжения кабеля 15 разрешающих сигналов . При появлении на выходе элемента И сигнала включается управляемый выпрямитель (УВ) и осуществляется подмагнИчивание индуктора 2. Индуктор 2 работает с полной мощностью (фиг. Ь) лишь кратковременно. Это уменьшает потребление мощности и -позволяет использовать режимы перегрузки и, следовательно, уменьшить габариты и вес индуктора 2. Когда отверстие 4 доходит до индуктора 1, датчик 14 вновь включает ток управления индуктора 2, и цикл повторяется. Размотка кабеля производился за счет силы натяжения кабеля. Двигатель работает при этом в режиме торможения противоключением. i фиксации барабана, прсле отключения питания привода служит электромагнит 16, к подвижной части которого закреплен штифт 17. После отключения питания электромагнита подвижная часть электромагнита возвращается в исходное положение и ш-шфт 17 проникает в
вдель 18. При этом барабан может повернуться только на угол, который определен промежутком между щелями 18 и 19.
Предлагаемый привод кабельного барабана с-линейным асинхронным двиг гателем имеет возможность регулирования силы двигателя в ходе работы. Такой привод особенно пригоден в системах электроснабжения передвижных потребителей (например, электропогрузчика, который работает на йеременном токе) , получаюЕдих питание при помощи гибкого кабеля и траектория движения которых имеет случайный характер. Сила натяжения кабеля зависит от Длины размотанной части/ т.е. зависит от расположения потребителя относительно пункта закрепления кабеля к источнику питания. Линейный асинхронный двигатель находится постоянно под напряжением во вре.мя работы установки.
При стоянке предлагаемый привод автоматически выбирает развиваемую силу Pj , необходимую для поддержания кабеля на Т1 ебуемом уровне. Соответственно регулируется и потребляемая мощность привода, что позволяет сэкономить электроэнергию по сравнению с приводом, который работает все время с постоянной силой и мощностью.
Отключать привод на время стоянки установки случайном характере движения невыгодно, так как это требует дополнительной аппаратуры управления и тормоз для фиксации должен быть выбран на более тяжелый режим его работы, что увеличит его габариты и мощность.
Фиг. 3
V
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кабельный барабан | 1974 |
|
SU517097A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| . | |||
