Изобретение касается электроприводов и может быть использовано в подъемно-транспортном машиностроении.
Известна конструкция подвесной конвейерной системы, содержащая самоходные тележки-грузоносители, движущиеся по подвесному пути, плоский линейный асинхронный двигатель (ЛАД), смонтированный в теле тележки. Вторичная часть ЛАД выполнена в виде металлической полосы, жестко скрепленной с подвесным путем, а токоподвод к ЛАД осуществляется с помощью скользящего токосъема. Управление тележками осуществляется системой управления, включающей в себя силовой трехфазный полупроводниковый преобразователь напряжения, обычно тиристорный, датчики скорости и положения, источник питания постоянного напряжения. Преобразователь обеспечивает формирование отрицательной и положительной полуволн напряжения в каждой из фаз ЛАД, являясь мощным многоканальным устройством управления [1] Недостатками известного устройства являются сложность конструкции и недостаточная надежность, что обусловлено наличием в системе управления трехфазных мощных полупроводниковых преобразователей, попускающих через себя всю мощность, потребляемую ЛАД, имеющих высокую стоимость, значительные массогабаритные показатели. Кроме этого, использование подобных преобразователей чревато появлением электромагнитных помех, влияющих на работу системы управления, что также снижает надежность устройства.
Известна подвижная конвейерная система, содержащая подвесной путь с токоподводом, установленные на подвесному пути с возможностью перемещения грузоносителя, электропривод которых выполнен в виде линейного асинхронного двигателя с индуктором и вторичной частью, размещенными на грузоносителе и подвесном пути, устройство управления электроприводом с подключенными к нему датчиками скорости и положения грузоносителей и источником постоянного напряжения [2] Однако в известной системе индуктор устанавливается неподвижно на подвесном пути. Место расположения индуктора коренным образом влияет на компоновку системы из-за необходимости питания индуктора ЛАД трехфазной системой напряжения. При подвижном индукторе конструкция системы усложняется вследствие токоподвода, выполняемого в виде токосъема на подвесных конвейерных системах с подвижным электроприводом и соответственно всей аппаратуры управления, размещаемой на подвижном грузоносителе вместе с индуктором ЛАД.
Техническим результатом изобретения является упрощение повышение надежности и упрощение конструкции подвесной конвейерной системы.
Указанная цель достигается тем, что в известной конвейерной системе, содержащей подвесной путь с токоподводом, установленные на подвесном пути с возможностью перемещения грузоносители, электропривод которых выполнен в виде ЛАД с индуктором и вторичной частью, размещенными на грузоносителе и подвесном пути соответственно, устройство управления с источником постоянного напряжения с подключенными к нему датчиками скорости и положения грузоносителей, согласно изобретению каждый из грузоносителей выполнен с автономным устройством управления, а индуктор ЛАД снабжен слоем управления с управляющей обмоткой, которая подключена к устройству управления через регулятор тока, связанный с источником питания постоянного напряжения.
Заявляемая подвесная конвейерная система отличается от прототипа, следовательно, соответствует критерию изобретения "новизна".
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной и других областях техники не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о его соответствии критерию "существенные отличия".
На фиг. 1 представлена конструкция грузоносителей, связанных с подвесной конвейерной системой; на фиг. 2 функциональная схема управления ЛАД; на фиг. 3 функциональная схема управления ЛАД по прототипу.
Подвесная конвейерная система содержит подвесной путь 1 с токоподводом 2, перемещающиеся по подвесному пути 1 грузоносители 3 со скользящим токосъемом 4, электропривод которых выполнен в виде ЛАД с индуктором 5 и вторичной частью 6, размещенными на грузоносителе 3 и подвесном пути 1 соответственно, слой 7 управления с управляющей обмоткой в виде катушки 8 подмагничивания, автономное устройство 9 управления с источником 10 постоянного напряжения с подключенными к нему датчиками 11 и 12 скорости и положения соответственно, и регулятор 13 тока. Подвеска грузоносителя 3 выполнена в виде несущих и направляющих колес 14 и 15 соответственно, ЛАД конструктивно может быть выполнен аналогично известному электроприводу, представленному в [3]
Устройство работает следующим образом. По команде "Пуск" от общего пульта управления подвесной конвейерной системы (не показан) через токоподвод 2 и токосъем 4 ЛАД грузоносителя 3 подается трехфазное напряжения. Тяговое усилие возникает в результате взаимодействия бегущего магнитного поля индуктора 5 ЛАД со вторичной частью 6. Грузоноситель 3 осуществляет перемещение по подвесному пути 1 под действием силы тяги Fтяги, значение которой определяется магнитной проницаемостью Мсу слоя 7 управления ЛАД в виде катушки 8 подмагничивания. Магнитная проницаемость изменяется в функции от тока управления в управляющей обмотке. Это позволяет регулировать силу тяги Fтяги, а следовательно, и скорость передвижения грузоносителя 3. Ток управления формируется регулятором 13 тока и определяется автономным устройством 9 управления в зависимости от заданной и фактической скоростей передвижения грузоносителя 3. Фактическая скорость измеряется датчиком 11 скорости. Функции датчика 12 положения заключается в том, чтобы контролировать местоположение каждого из грузоносителей 3 на подвесном пути 1, не допуская их столкновения. Функциональное назначение регулятора 13 тока состоит в усилении сигналов, идущих от устройства 9 управления. Такая схема управления обеспечивает пуск, торможение и позиционирование грузоносителей, а также заданную скорость последних на маршевых участках подвесного пути. При увеличении тока управления в обмотке управления слой 7 управления, содержащий катушку 8 подмагничивания, насыщается, и его Мсу уменьшается, что приводит к увеличению Fтяги ЛАД, и наоборот. Регулируемый ток управления в слой 7 управления значительно меньше тока в силовых обмотках ЛАД, при этом имеется только один канал управления через регулятор 13 тока.
При сравнению с прототипом (фиг. 3) предлагаемая конвейерная система имеет только один маломощный канал управления, тогда как в прототипе необходимо при управлении шесть мощных каналов управления, характерных для тиристорных схем преобразования, что влечет за собой возникновение значительных электромагнитных помех.
Таким образом, использование предлагаемого устройства позволит повысить надежность конвейерная системы из-за снижения уровня электромагнитных помех, что особенно важно при наличии множества автономных грузоносителей, а также упростить конструкцию устройства, снизить вес и стоимость из-за отсутствия полупроводниковых преобразователей в канале управления ЛАД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛИНЕЙНЫМ ЭЛЕКТРОПРИВОДОМ | 1991 |
|
RU2050674C1 |
| Устройство управления электроприводом с линейным асинхронным электродвигателем | 1977 |
|
SU674175A1 |
| Линейный шаговый электродвигатель | 1989 |
|
SU1700706A1 |
| ТРЕХФАЗНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2002 |
|
RU2231203C2 |
| Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом | 2017 |
|
RU2681574C2 |
| Автоматизированная установка для многономенклатурной штамповки деталей из полосового материала | 1987 |
|
SU1532152A1 |
| Электропривод лифта | 1979 |
|
SU889585A1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2416864C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2018969C1 |
| Частотно-регулируемый электропривод с блоком торможения | 1982 |
|
SU1056411A1 |
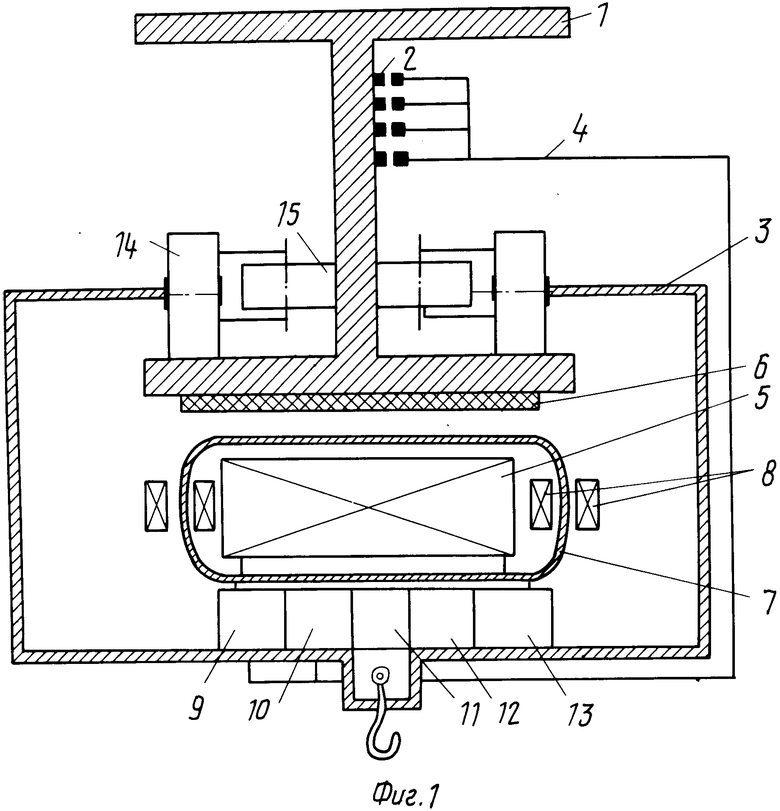

Использование: при транспортировании в подъемно-транспортном машиностроении. Сущность изобретения: конвейерная система содержит подвесной путь с токоподводом, грузоносители, электропривод которых выполнен в виде линейного асинхронного двигателя (ЛАД) с индуктором 5 и вторичной частью 6, автономное устройство 9 управления, связанное с источником 10 постоянного тока и датчиками 11 и 12 скорости и положения, при этом ЛАД снабжен слоем 7 управления с обмоткой управления, связанным через регулятор 13 тока с автономным устройством 9 управления и источником 10 постоянного напряжения. При работе системы сигналы с датчика 11 скорости, размещенного на грузоносителе, поступают на вход устройства 9 управления, которое в случае отклонения фактического значения скорости от заданного, поступающего с общего пульта управления системой, выдает на выходе сигнал рассогласования, который после преобразования в регуляторе 13 тока поступает на обмотку управления слоя 7 управления, изменяя магнитный поток элементов ЛАД. Устройство благодаря использованию ЛАД с регулируемым слоем управления позволяет повысить надежность системы и упростить конструкцию, что связано со снижением ее веса и стоимости. 3 ил.
ПОДВЕСНАЯ КОНВЕЙЕРНАЯ СИСТЕМА, содержащая подвесной путь с токоподводом, установленные на подвесном пути с возможностью перемещения грузоносителя, электропривод которых выполнен в виде линейного асинхронного двигателя с индуктором и вторичной частью, размещенными на грузоносителе и подвесном пути, устройство управления электроприводом с подключенными к нему датчиками скорости и положения грузоносителей и источником постоянного напряжения, отличающаяся тем, что подвесной путь и грузоносители снабжены скользящим токоподводом, индуктор линейного асинхронного двигателя, устройство управления с источником постоянного напряжения и датчиками размещены на грузоносителе, причем индуктор линейного асинхронного двигателя снабжен слоем управления с управляющей обмоткой, которая подключена к устройству управления через регулятор тока, связанный с источником питания постоянного напряжения.
| Линейный асинхронный двигатель | 1980 |
|
SU917271A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
