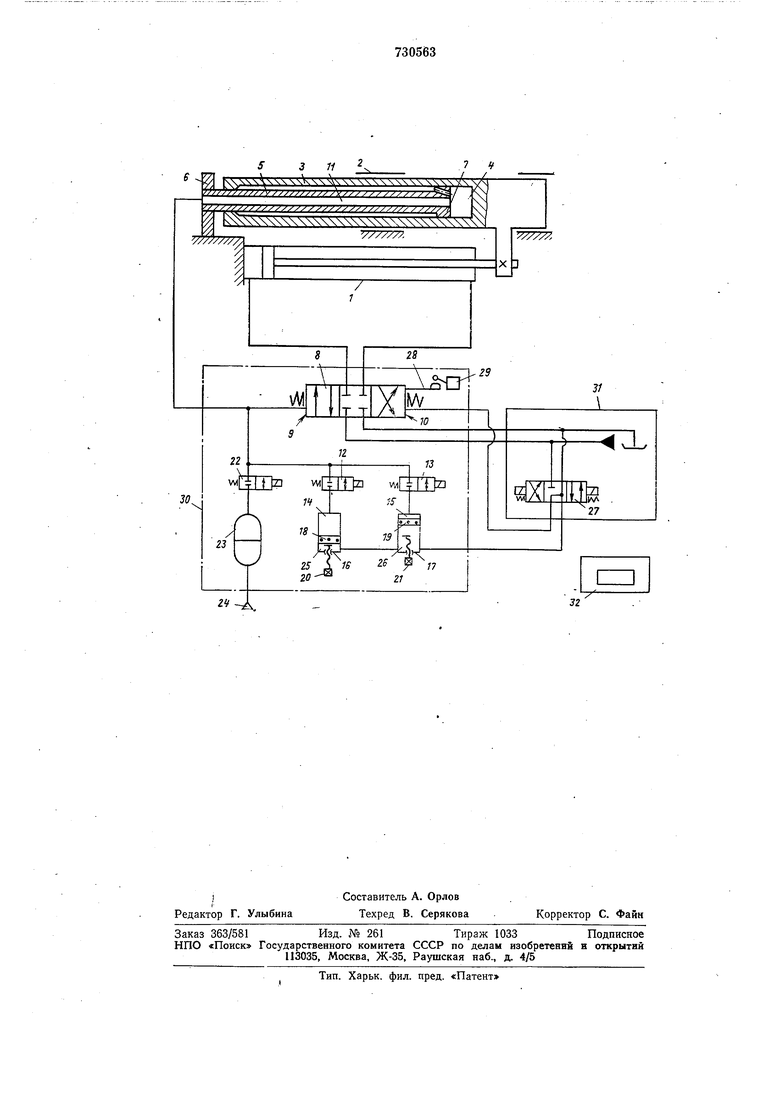
клапан 22 с устройством для подпитки 23, воздушная полость которого связана с источником 24 постоянного, давления воздуха, ведичина которого может настраиваться в некоторых пределах. Возвратные полости 25 ,и 26 гидроцилиндров 16 и /7 совместно с торцом 10 золотника 8 связаны с распределителем 27. Золотник 8 жестко связан с толкателем 28, взаимодействующим с датчиком 29 среднего положения. Золотник и гидроцилиндры 16 и 17 размещены в блоке 30. Питание модуля осуществляется насосной станцией 31, а управление программатором 32.
Модуль промышленного робота работает следующим образом.
При установке распределителя 27 вправо (по чертежу) и включении клапана 12, масло из полости 14 пидроцилиндра- 16 будет вытесняться в полость 4 обратной связи и под торец 9 золотника 8, который, преодолевая усилие пружины со стороны торца 10, переместится вправо. Масло от насосной станции 31 будет поступать в поршневую полость силового гидроцилиндра /, перемещая его шток и штангу 3 вправо. Как только полость 14 гидроцилиндра 16 опорожнится, давление иод торцом 9 упадет, и золотник 8 под воздействием пружин установится в среднем положении и запрет обе полости гидроцилиндра 1, шток которого при этом остановится, совершив перемещение в заданную точк1у позиционирования. При этом датчик 29 даст обратный сигнал программатору 32 об остановке штанги 3, который даст команду на срабатывание захвата детали (не показан), размещенного на штанге 3. Одновременно осуществляется зарядка полости 14 гидроцилиндра, для чего включается клапан 22 и масло из устройства подпитки 23 поступает в полость 14, для чего распределитель 27 будет установлен-в крайнее левое положение, обеспечивая подвод масла под торец 10 для удержания золотника 8 в среднем положении.
После зарядки гидроцилиндра 16, программатор 32 даст команду на отработку другой величины позиционного перемещения, но от другого гидроцилиндра 17.
Для обеспечения позиционного перемещения в другую сторону (влево по чертежу) предварительно обеспечивается опорожнение полостей 14 и 15 гидроцилиндров 16 и 17.
При установке распределителя 27 в крайнее левое положение и подключении
гидроцилиндра 17, золотник 8 переместится влево, соединив штоковую полость силового гидроцилиндра 1 с насосом и первый будет перемещать штангу 3 влево. При этом масло из полости 4 обратной связи будет поступать в полость 15 гидроцилиндра 17. Как только полость 15 заполнится, давление масла в линии обратной связи повысится и переключит золотник 8 в среднее положение, силовой гидроцилиндр / остановится, датчик 29 даст обратный сигнал программатору52 на переключение распределителя 27 вправо и включение блокирующего клапана 22 для опорожнения полости 15 гидроцилиндра 17 в устройства подпитки 23.
После подготовки системь программатор 32 даст команду на отработку последующей величины позиционного перемещения. Настройка .модуля промыщленного робота на различные по величине позиционные перемещения осуществляется изменением объемов полостей 14 и 15 гидроцилиндров 16 и 17 регулировочными упорами 20 и 21.
Изменение программы отработки различных по величине позиционных перемещений обеспечивается щтеккерным набором программатора 32, которым изменяют (последовательность подключения гидроцилиндроБ 16 и 17 или включают их одновременно.
Формула язобрет е,н и я
Модуль промыщленного робота, содержащий силовой- гидроцилиндр с золотником, щтаигу, (расположенную в направляющих, жестко связанную оо щтоком силового гидроцилиндра, и регулируемые упоры, отличающийся тем, что, с целью расщиреиия технологических возможностей, он снабжен дополнительными гидроцилиндрами, в крыщках которых смонтированы регулируемые упоры, полым плунжером, который расположен внутри щтанги и сдужит для образования в ней полости обратной связи, причем один конец плунжера жестко закреплен на корпусе силового гидрэцилиндра и соединен с дополнительными гидроцилиндрами и с одним из торцов золотника и снабжен устройством для подпитки полости обратной связи.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР № 555006, кл. В 25 I 3/00, 19.01.76.
11
/A I4 ХЧКХХ ЧХХ 4 /N
,Л;тГГГ.л.,..;.-,,-./.- - л,V,,,,, ,™i/ .
У///// y У(// / // // у / .- , 0
7 tf I /
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1979 |
|
SU873571A2 |
| Модуль промышленного робота | 1982 |
|
SU1060463A1 |
| Гидропривод шагового перемещения | 1977 |
|
SU691614A1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| Устройство для шаговой подачи | 1986 |
|
SU1395440A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1975 |
|
SU668636A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1973 |
|
SU441880A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Гидравлический станок-качалка | 1973 |
|
SU487998A1 |
| Привод линейного перемещения | 1980 |
|
SU906111A1 |