00
1
00 ел
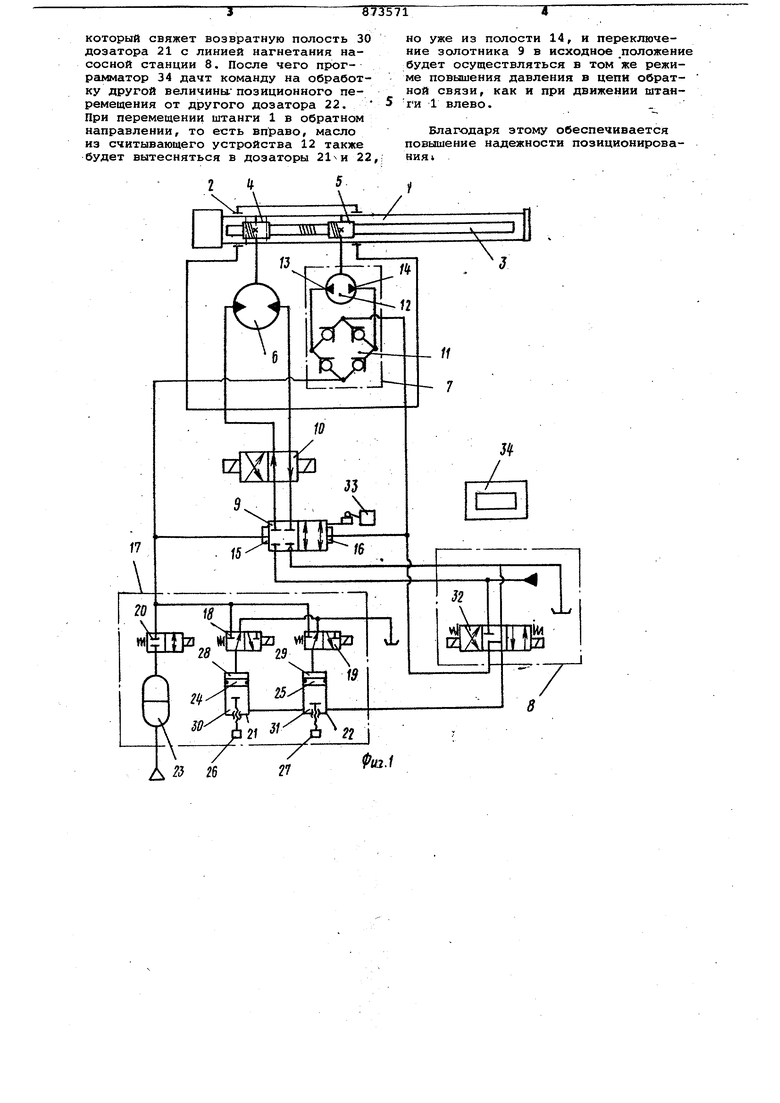
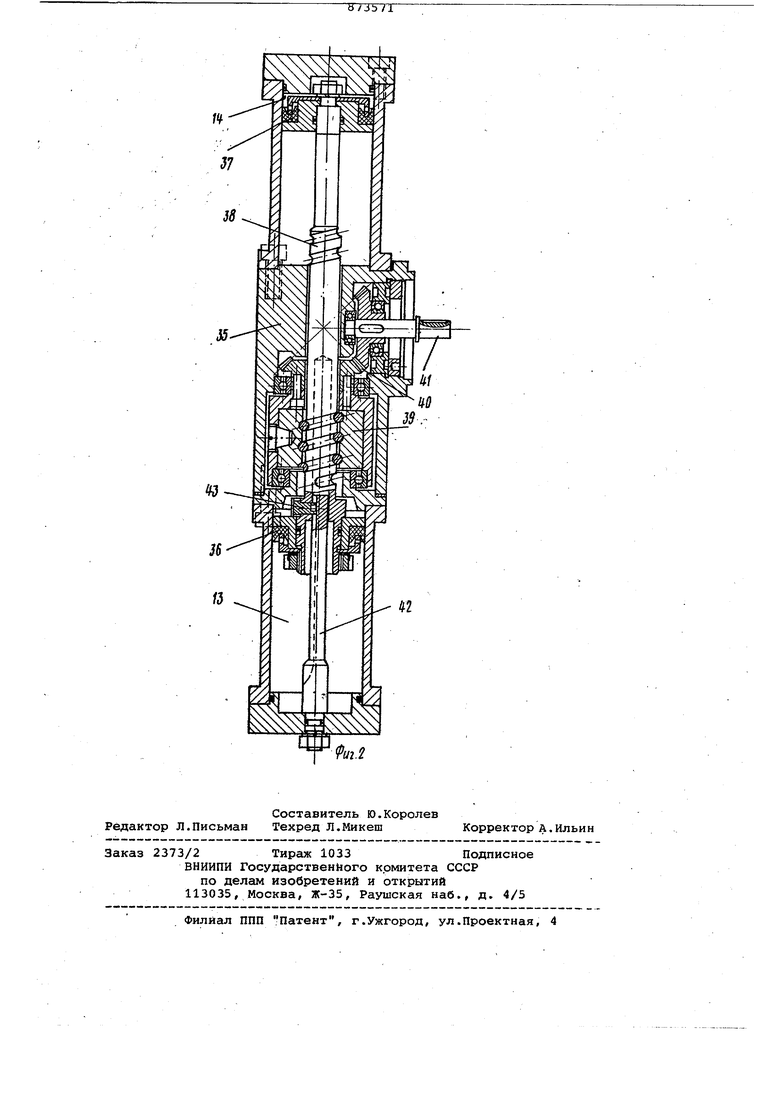
Изобретение относится к машиностроению, в частности к манипуляторам с программным управлением, и мо жет найти применение при создании промшиленных роботов с поступательным перемещением элементов, являясь усовершенствованием изобретения по авт.св. 730563. Основное изобретение описывает модуль,промышленного робота, содержащий расположенную в направляющих штангу с силовым приводом ,и золотни ком, объемный датч1Гк обратной связи и дозирующее устройство l Однако переключение золотника, запирающего рабочие полости силового привода/ происходит в различных режимах при противоположных перемещениях штанги. В первом случае пере ключение золотника происходит от пр жины при падении давления в цепи об ратной связи, в другом случае - за счет повышения давления после запол нения дозирующего устройства. Различные режимы переключения зо лотника вызывают различные переходные процессы в цепи обратной связи по сжимаемости масла и по времени переключения. Это ведет к простоям в работе модуля по позиционированию при перемещении штанги в обоих направлениях и, как следствие, к понижению эксплуатационной надежности Цель изобретения - повышение надежности позиционирования за счет идентичных режимов переключения золотника. Для достижения этой цели датчик ,обратной связи выполнен в виде мост обратных клапанов, имеющий установленное в одной из его диагоналей считывающее устройство линейных сме щений штанги, а другая диагональ мос та соединена с обоими торцами золотника, причем считывающее устройство выполнено в виде цилиндра с поршнями, образующими полости обратной свя зи; жестко соединенными между собой винтом винтовой передачи, гайки кото рой кинематически связана со штангой. На фиг. 1, показана схема модуля промышленного робота; на фиг. 2 конструкция датчика обратной связи. Штанга 1 размещена в направляю.щих 2 и посредством рейки 3 и шестерней 4 и 5 связана с силовым приводом в виде гидромотора б ц датчиком 7 обратной связи. Питание гидромотора б осуществляется от наносной стаЬции 8 через золотник 9 и распределитель 10. Датчик 7 обратной связи сос тоит из моста 11 обратных клапанов и объемного реверсивного поворотного считывающего устройства 12 линейного смещения штанги 1, полости 13 и 14 которого срязаны с.одной диагональю моста 11 Другая диагональ моста 11 связана с торцевыми полостями 15и 16 золотника 9. Полость 15 золотника 9 связана с дозирующим устройством 17, состоящего из клапанов 18 -: 20, дозаторов 21 и 22, подпиточной емкости 23 постоянного давления. Дозаторы 21 и 22 имеют подвижные поршни 24 и 25, регулируемые упоры 26 и 27, объемные полости 28 и 29, возвратные полости 30 и 31, связанные совместно с торцевой полостью 16золотника 9 через распределитель 32 с насосной станцией 8. Золотник 8 снабжен датчиком 33 исходного положения. УпЕ авление модулем осуществляется программатором 34. Поворотное считывающее устройство 12 см.фиг.2 . выполнено в виде корпуса.35, в котором размещены поршни 36 и 37, образующие полосаги 13 и 14, и жестко связанные между собой винтом 38 шариковой передачи, гайка 39 которой связана через зубчатую передачу 40 с выходным валом 41, соединенные с шестерней 5. Ось 42 и шпонка 43 удерживают винт 38 от проворота. Модуль промьшшенного робора работает .следующим образом. При установке распределителя 32 влево (по чертежу) золотник 9 переключится влево, обеспечив доступ масла от насосной станции 8 к гидромотору 6, который будет перемещать штангу 1 влево. При этом линейное смещение штанги 1 посредством рейки 3 и шестерни 5 будет передаваться на считывающее устройство 12, где через зубчатую передачу 40 и винтовой механизм 39 и 38 средуцируется в линейное перемещение поршней 36 и 37. Масло из полости 13 через мост 11 обратных клапанов по цепи обрат,ной связи будет поступать в дозирую|щее устройство 17, где при соответствующем включенном клапане, например 18, будет заполнять объемную полость 28 дозатора 21. При достижении поршнем 24 регулируемого упора 26 давление масла .в цепи обратной связи, а соответственно под торцом 15 золотника 9, поднимается и переключит последний вправо, который перекроет обе полости гидромотора 6. Штанга 1 остановится, осуществив позиционное перемещение заданной величины. Датчик 33 золотника 9 даст jcoманду программатору 34 об остановке штанги 1, который в свою очередь даст команду на срабатывание захвата деталей на чертеже не показаны , размещенного на штанге 1. Одновременно осуществляется опорожнение объемной полости 28 дозатора 21 на слив за счет выключения клапана 18 и переключения распределителя 32 вправо.
который свяжет возвратную полость 30 дозатора 21 с линией нагнетания насосной станции 8. После чего программатор 34 дачт команду на обработку другой величины. позиционного перемещения от другого дозатора 22. При перемещении штанги 1 в обратном направлении, то есть вправо, масло из считывающего устройства 12 также будет вытесняться в дозаторы 22
но уже из полости 14, и переключение золотника 9 в исходное положение будет осуществляться в том же режиме повьвиения давления в цепи обратной связи, как и при движении штанги 1 влево.
Благодаря этому обеспечивается повышение надежности позиционирования i
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1982 |
|
SU1060463A1 |
| Модуль промышленного робота | 1978 |
|
SU730563A1 |
| Привод линейного перемещения | 1980 |
|
SU906111A1 |
| Гидравлический пресс | 1977 |
|
SU737242A1 |
| Способ автоматического управления реверсивным движением гидродвигателя | 1985 |
|
SU1275124A1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1980 |
|
SU918584A1 |
| ГИДРОПРИВОД ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2005 |
|
RU2289038C1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| Устройство управления промышленным роботом | 1982 |
|
SU1104311A1 |
| Гидравлическое нажимное устройство прокатной клети | 1986 |
|
SU1319959A1 |
МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА по авт.св. № 730563, отличающ и и с я тем, что, с целью повышения надежности позиционирования, датчик обратной связи выполнен в виде моста обратных клапанов, имеющего iустановленное в одной из его диагоналей считывающее устройство линейных смещений штанги, а другая диагональ моста соединена с,обоими торцами золотника, причем считывающее устройство выполнено в виде цилиндра с поршнями, образующими полости обратной связи, жестко соединенные между собой винтом винтовой передачи, гайка которой кинематически свягчана со штангой.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Модуль промышленного робота | 1978 |
|
SU730563A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
