при этом первый, второй, третий,, четвертый и пятый выходы блока задержки соединены с вторыми входами Соответственно первого блока сложения - через первый усилитель,, второго блока сложения - через второй усилитель, третьего блока сложения через третий усилитель, первого
блока вычитания - непосредственно, второго блока вычитания - через четвертый усилитель, при этом первым и BTOfSdM входом И выходом стабилизирующего фильтра соответственно являются вход пятого усилителя, вход блока задержки и выход второго блока вычитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА | 2004 |
|
RU2253131C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1982 |
|
SU1090136A1 |
1. СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ, содер;){саший блок вычитания,- последовательно включенные первый фильтр Калмана, первый усилитель, перЪый интегратор, второй усилитель и первьай сумматор, второй вход которого соединен с лторым выходом первого фильтра Ксшмана, и последовательно включеН1Ные второй фильтр Калмана, третий усилитель, второй интегратор и второй сумматор, выход которого соединен с вторым входом второго усилителя, при этом выход первого сумматора соединен с вторыми входами .второго сумматора и первого и третьего усилителей через блок вычитания, второй вход которого соединен с вторым выходом вто- рого фильтра Калмана, при этом первый и второй фильтры Калмана содержат последовательно включенные блок вычитания, первый усилитель, первый блок сложения и первый блок згщержки, последовательно включенные второй усилитель, второй /блок, сложения, второй блок задержки и третий усилитель, последовательно включенные четвертый усилитель, третий блок сложения третий блок задержки, пятый усилитель и четвертый блок сложения , второй и третий входы и выходы которого соединены соответственно с выходом первого блока задержки, выходом третьего усилителя и вторыми входами блока вычитания и первого блока сложения, и последовательно включенные шестой усилитель и пятый блок сложения,, выход которого соединен с вторым входом третьего блока сложения, выход второго блока задержки соединен с вторым входом пятого блока сложения, a выход третьего блока задержки соединен с входом шестого усилителя и вторым входом . четвертого блока сложения, причем выход блока вычитания соединен с входами второго и четвертого усилителей и является первым выходом первого и второго фильтров Калмана, входом которых является вход блока вычитания, a вторым выходом - выход (Л первого блока сложения, при этом первый и второй интеграторы содержат последовательно включенные блок сложения и блок задержки, выход которого соединен с первым входом блока сложения, a входом и выходом первого и второго интеграторов являются соответственно второй вход блока сложения и выход блока сложения, отличающийся тем, что, с целью увеличения точности и устойчивости измерений на участках наблюдения мао лой длительности при сложной динаX) мике движения объекта измерений, введены стабилизирующий фильтр, вый и второй входы и выходы которого соединены соответственно с входом первого фильтра Калмана, с выходом первого сумматора и с входом второго фильтра Калмана. 2. Измеритель по п. 1, отлича. ющийся тем, что .стабилизирующий фильтр содержит блок задержки, первый, второй, третий и четвертый усилители и последовательно включенные пятый усилитель, первый, второй и третий блоки сложения и первый и второй блоки вычитания,
Изобретение относится к радиотехнике и.может использоваться в радиотехнических системах навигации и измерения параметров траекторий летательных аппаратов.
Известен следящий измеритель, содержащий фильтр Калмана l . .
Однако известный следящий измеритель имеет низкую точность и усточивость измерения в условиях, когда динамика движения объекта, параметры траектории которого подлежат измерению, не согласованы с порядком фильтра Калмана.
Наиболее близким техническим решением к изобретению является следящий измеритель, содержащий блок вычитания, последовательно включенные первый фильтр Калмана, первый усилитель, первый интегратор, второй усилитель и первый сумматор, втррй вход которого соединен с вторым выходом первого фильтра Калмана, и последовательно включенные второй фильтр Калмана, третий усилитель, второй интегратор и второй сумматор выход которого соединен с вторым входом второго усилителя, при этом выход первого сумматора соединен с вторыми входами второго сумматора и первого и третьего усилителей через блок вычитания, второй вход котрого соединен с вторым выходом второго фильтра Калмана, при этом перв и второй фильтры Калмана содержат последовательно включенные блок вычитания, первый усилитель, первый блок сложения и первый блок задержки, последовательно включенные второй усилитель, второй блок сложения второй блок задержки и третий усилитель, последовательно включенные четвертый усилитель, третий блок сложения, третий блок задержки, пятый усилитель и четвертый блок сложения, второй и третий входы и выходы которого соединены соответственно с выходом первого блока задержки, выходом третьего усилителя и вторыми входаьи блока вычитания и первого блока сложения, и последовательно включенные шестой усилит тель и пятый блок сложения, выход которого соединен с вторым входом третьего блокасложения, выход второго блока задержки соединен с вторым входом пятого блока сложения, а выход третьего блока задержки соединен с входом шестого усилителя и вторым входом четвертого блока сложения; причем выход блока вычитания соединен с входами второго и четвертого усилителей и является первым выходом первого и второго фильтров Калмана, выходом которых является выход блока вычитания, а вторым выходом - выход первого -блока сложения, при этом первый и второй интеграторы содержат последовательно включенные блок сложения, и :блок задержки, выход которого соединен с первым входом блока сложения а входом и выходом первого и второго интеграторов являются соответственно второй вход блока сложения и выход блока сложения 2 .
Однако известный следящий измеритель имеет низкую точность и устойчивость измерений на участках наблюдения малой длительности при сложной динамике движения объекта.
Цель изобретения - повышение точНости и устойчивости измерений на участках наблюдения малой длительности при сложной динамике движения .объекта измерений.
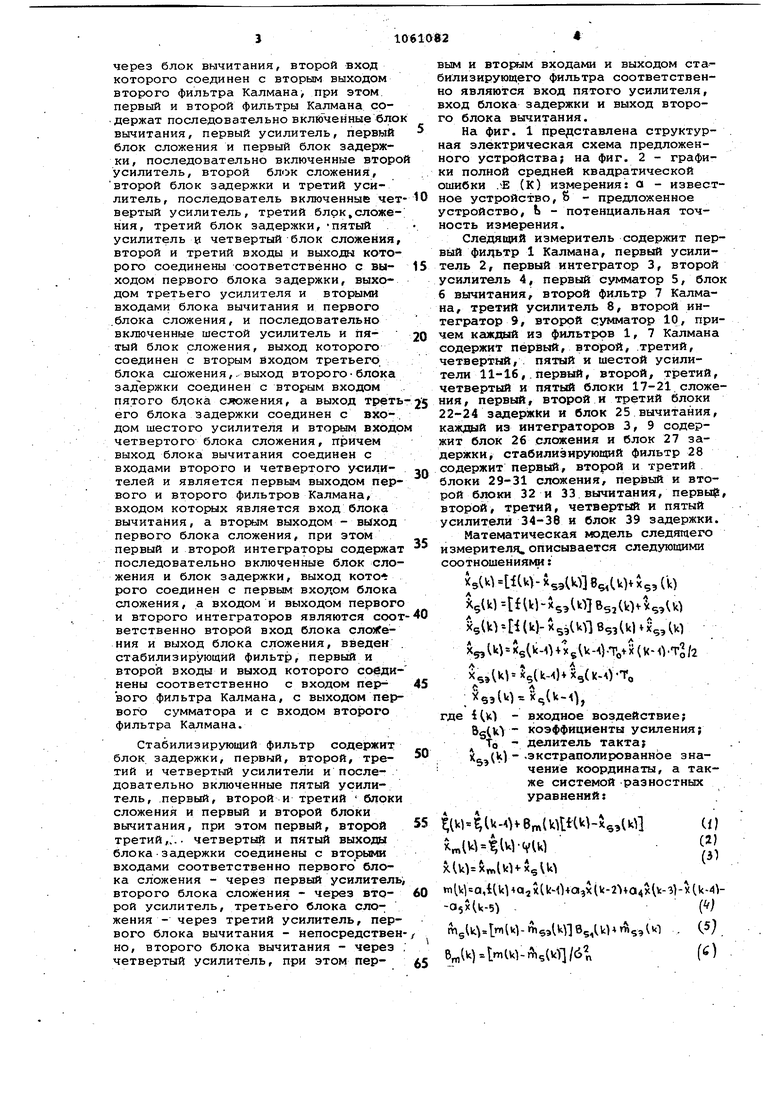
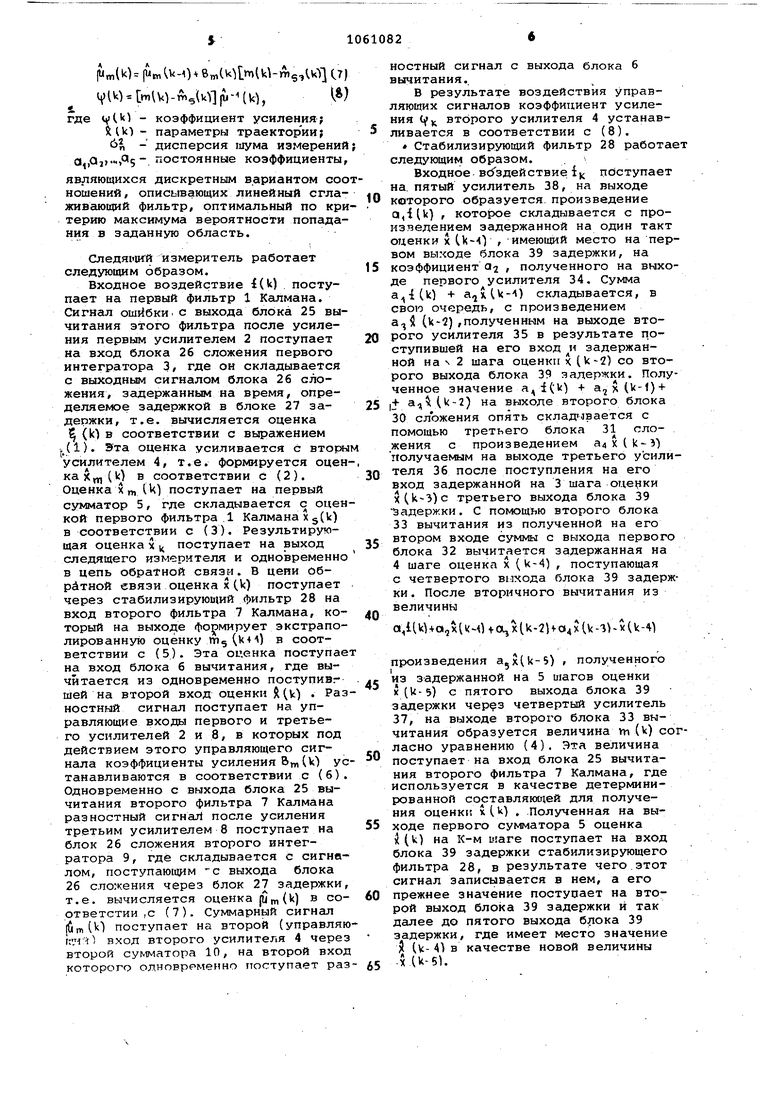
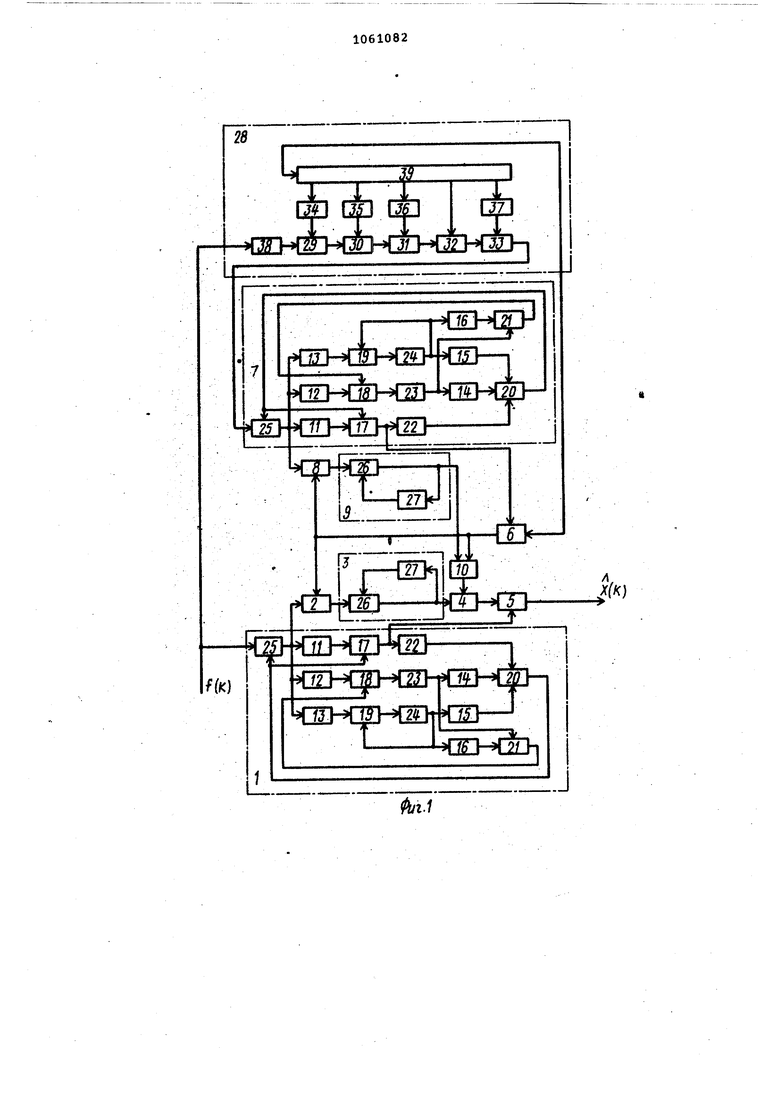
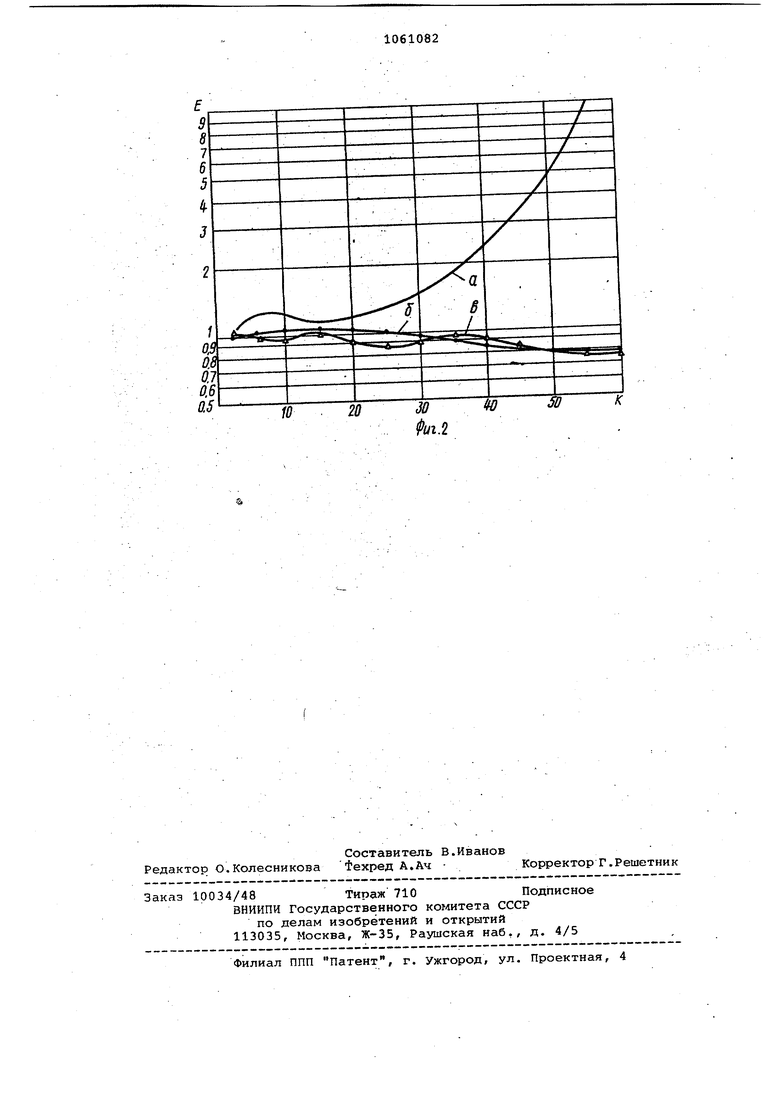
Цель достигается тем, что в следящий измеритель, содержащий блок вьгчита1Л1я, последовательно включенные первый фильтр Калмана, первый усилитель, первый интегратор, второй усилитель и первый сумматор, второй вход которого соединен с вторым выходом первого фильтра Калмана, и последовательно включенные второй фильтр Калмана, третий усилитель, второй интегратор и второй сумматор, выход которого соединен с вторым входом второго усилителя, при этом выход первого сумматора соединен с вторыми входами второго сумматора и первого и третьего усилителей через блок вычитания, второй вход которого соединен с вторым выходом второго фильтра Калмана, при этом. первый и второй фильтры Калмана со. держат последовательно вклйченные бло вычитания, первый усилитель, первый блок сложения и первый блок задержки, последовательно включенные второ усилитель, второй блок сложения, второй блок задержки и третий усилитель, последователь включенные чет вертый усилитель, третий блок.сложеНИН, третий блок задержки,-пятый . усилитель и четвертыйблок сложения второй и третий входы и выходы которого соединены соответственно с выходом первого блока задержки, выходом третьего усилителя и вторыми входами блока вычитания и первого .блока сложения, и последовательно включенные шестой усилитель и пятый блок сложения, выход которого соединен с вторым входом третьего блока сложения,-ВЫХОД второго-блока задЪржки соединен с вторым входом пятого бдока сложения, а выход трет его блока задержки соединен с входом шестого усилителя и вторым вход четвертого блока сложения, причем выход блока вычитания соединен с входами второго и четвертого усилителей и является первым выходом пер вого и второго фильтров Калмана, входом которых является вход блока вычитания, а вторым выходом - выход первого блока сложения, при этом первый и второй интеграторы содержа последовательно включенные блок сло жения и блок задержки, выход кото рого соединен с первым входом блока сложения, а входом и выходом первог и второго интеграторов являются сро ветственно второй вход блока слох ения и выход блока сложения, введен стабилизирующий фильтр, первый и второй входы и выход которого соеди иены соответственно с входом первого фильтра Калмана, с выходом пер вого сумматора и с входом второго фильтра Калмана. Стабилизирующий фильтр содержит блок задержки, первый, второй, третий и четвертый усилители и последовательно включенные пятый усилитель, первый, второй и третий блоки сложения и первый и второй блоки вычитания, при этом первый, второй третий,... четвертый и пятый выходы блоказадержки соединены с вторыми входами соответственно первого блока сложения - через первый усилитель второго блока сложения - через второй усилитель, третьего блока сложения - через третий усилитель, первого блока вычитания - непосредствен но, второго блока вычитания - через четвертый усилитель, при этом первым и вторым входами и выходом стабилизирующего фильтра соответственно являются вход пятого усилителя, вход блока задержки и выход второго блока вычитания. На фиг. 1 представлена структурная электрическая схема предложенного устройства; на фиг. 2 - графики полной средней квадратической ошибки .Е (к) измерения: а - известное устройство, 6 - предложенное устройство, Ь - потенциальная точность измерения. Следящий измеритель содержит первый фидьтр 1 Калмана, первый усилитель 2, первый интегратор 3, второй усилитель 4, первый сумматор 5, блок б вычитания, второй фильтр 7 Калмана, третий усилитель 8, второй интегратор 9, второй сумматор 10, причем каждый из фильтров 1, 7 Калмана содержит первый, второй, третий, четвертый, пятый и шестой усилители 11-16,.первый, второй, третий, четвертый и пятый блоки 17-21 сложения, первый, второй и третий блоки 22-24 задержки и блок 25 вычитания, каждый из интеграторов 3, 9 содержит блок 26 сложения и блок 27 задержки, стабилизирующий фильтр 28 содержит первый, второй и третий блоки 29-31 сложения, перззый и второй блоки 32 и 33 вычитания, первы, второй, третий, четвертый и пятый усилители 34-38 и блок 39 задержки. Математическая модель следящего измерителя;, описывается следующими соотношениягда: ti(kV Чэ1Ю1 (k) --tf и)-Чэи)В5.,(„и) (k) Xg,U Ss(kMU у ).To X ( KMVT2/2 XsjU st-)Ч() о (, где i(C входное воздействие; Bg(k коэффициенты усиления; То - делитель такта; К k) - .экстраполированное значеиие координаты, а также системой разностных уравнений: tw4lj- H8m{k WH-K5,(M „lUbtUVVUl xU)XwlkHx5 M ,tCkl4a,KU4)+a,x(k-2 4a4xlk-)- tU-4b ) -(; mgUblwUl-nis5imB5,U)5,Ul . (.5), 6(k)4mW-,5(k)1/6,(i)
(k) ((V:-l) + 8((kbrr.5, С7|
H))(MT|U-MH, где Ц|С1) - коэффициент усиления;
klkl - параметры траектории; 6, - дисперсия шума измерений а,, ° °и коэффициенты, являющихся дискретным вариантом сооношений, описывающих линейный сглаживающий фильтр, оптимальный по кри терию максимума вероятности попадания в заданную область.
Следя1Ц й измеритель работает следующим образом.
Входное воздействие (И посту пает на первый фильтр 1 Калмана. Сигнал ошибки 1 с выхода блока 25 вычитания этого фильтра после усиления первым усилителем 2 поступает на вход блока 26 сложения первого интегратора 3, где он складывается с выходным сигналом блока 26 сложения, задержанным на время, определяемое задержкой в блоке 27 задержки, т.е. вычисляется оценка (k) в соответствии с выражением ( 1). Эта оценка усиливается с втори усилителем 4, т.е. формируется оценKaj(k) в соответствии с (2). Оценка X П1 (U) поступает на первый csMMaTop 5, где складывается с оценкой первого фильтра .1 КалманаX5(k) в соответствии с (3). Результирующая оценка X ц поступает на выход следящего измерителя и одновременно в цепь обратной связи. В цеии обрйтной связи оценка X (k) поступает через стабилизирующий фильтр 28 на вход второго фильтра 7 Калмана, который на выходе Формирует экстраполированную оценку nig ( в соответствии с (5). Эта оценка поступает на вход блока б вычитания, где вычитается из одновременно поступивгшей на второй вход оценки (k) . Разностный сигнал поступает на управляющие входы первого и третьего усилителей 2 и 8, в которых под действием этого управляющего сигнала коэффициенты усиления Ву„ (k) устанавливаются в соответствии с (6). Одновременно с выхода блока 25 вычитания второго фильтра 7 Калмана разностный сигнат после усиления третьим усилителем 8 поступает на блок 26 сложения второго интегратора 9, где складывается с сигналом, поступающим с выхода блока 26 сложения через блок 27 задержки, т.е. вычисляется оценка (Urn (Ч ответстии .с (7). Суммарный сигнал () поступает на второй (управляюг:л:О вход второго усилителя 4 через второй сумматора 10, на второй вход которого олновррменно поступает разностный сигнал с выхода блока 6 вычитания.
В результате воздействия управляющих сигналов коэффициент усиления ( второго усилителя 4 устанавливается в соответствии с (8).
Стабилизирующий фильтр 28 работа следующим образом.
Входное всГздействие 1)4 поступает на пятый усилитель 38, на выходе которого образуется произведение a,i(k) , KOTojxDe складывается с произведением задержанной на один такт оценки X t имеющий место на первом выходе блока 39 задержки, на коэффициент Oj , полученного на выходе первого усилителя 34. Сумма ) + ) складывается, в свою очередь, с произведением а,5 (k-),полученным на выходе второго усилителя 35 в результате поступившей на его вход и задержанной на N 2 шага оценки х (k2) со второго выхода блока 39 задержки. Полученное значение а i(;k) + (k-1) + 1+ ) нз выходе второго блока 30 сложения опять складывается с помощью третьего блока 31 сложения с произведением a xik-i) получае№лм на выходе третьего усилителя 36 после поступления на его вход задержанной на 3 шага x(k--3)c третьего выхода блока 39 Задержки. С помощью второго блока 33 вычитания из полученной на его втором входе суммы с выхода первого блока 32 вычитается задержанная на 4 шаге оценка х (k-4) , поступающая с четвертого вихода блока 39 задержки . После вторичного вычитания из величины
a,HkUa,xU4) ta,xtk-2)va4x(k-l)-x(k-M
произведения a.x(k-5) , полученного I
из задержанной на 5 шагов оценки
{(U-5) с пятого выхода блока 39 задержки четвертый усилитель 37, на выходе второго блока 33 вычитания образуется величина м (k) соласно уравнению (4). Эта величина поступает на вход блока 25 вычитания второго фильтра 7 Калмана, где используется в качестве детерминированной составляюв1ей для получения оценки xCk) , Полученная на выходе первого сумматора 5 оценка J(k) на К-м шаге поступает на вход блока 39 задержки стабилизирующего фильтра 28, в результате чего.этот сигнал записывается в нем, а его прежнее значение поступает на второй выход блока 39 задержки и так далее до пятого выхода 39 задержки, где имеет место значение
jl (k- 4 в качестве новой величины
.x(k-5).
Таким обр-азом, после получения оценки J(И и обновления содержимого блока 39 задержки, производимо го за /время между двумя измерениями Tft, следящий измеритель готов К|. обработке входного воздействия на следующем шаге.
Для оценки эффективности предлагаемого устройства проведено моделирование на ЭВМ.,
В качестве реализации высокоди- намического входного воздействия используют массив дискретных измерений, рассчитываемых на основе вычисления текущих значений с шагом TU 0,05 с полинома шестой степени следующего вида
UVV50.10 -5-w4To-WK4 o/2-20k T /3-1oHT(4 -5k5T5/5l-2k6T /6i rtUb гдепМ случайная ошибка измерений, распределенная по нормальному закону с нулевым средним и единичной дисперсией. Число шагов К, оп ределяющее длительность участка наблюдения, принято равным 60. Величина средней квадратической ошибки Е измерений на каждом шаге определяется методом статических испытаний на основе пятидесяти реализаций.
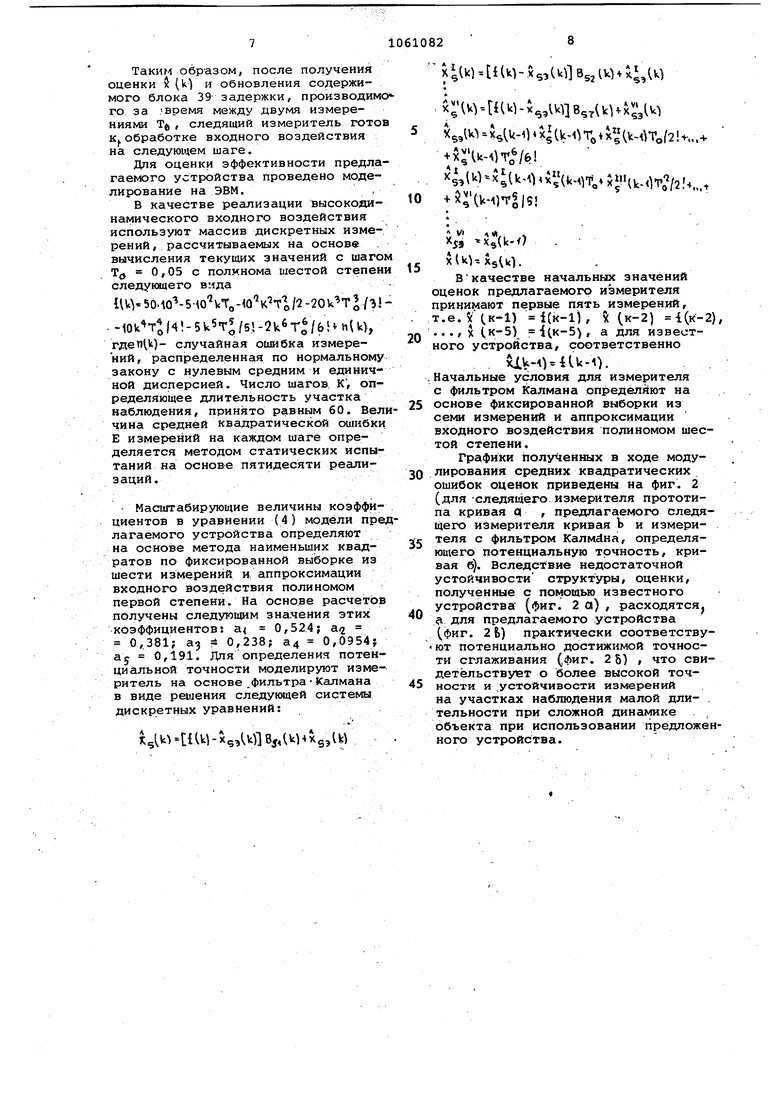
Масштабирующие величины коэффициентов в уравнении (4) модели предлагаемого устройства определяют на основе метода наименьших квадратов по фиксированной выборке из шести измерений и аппроксимации входного воздействия полиномом первой степени. На основе расчетов получены следующим значения этих коэффициентов: а{ 0,524} а 0,381; аз 0,238; а 0,0954 aj 0,191. Для определения потенциальной точности моделируют измеритель на основе .фильтра-калмана в виде решения следующей системы дискретных уравнений:
K5l.kb UM-x5,Ulil В5,,иГ
it
x|(k)(M-X5,CH ВдЛ к,U1
5Э
.,щ 8„иих;э1ч
X5,)«ii(MWoixy(MTof2U4..H
5vi
+ x 4MToV6
s l b sU-Abi,(kMit.jm,,T, ,
ntMjT isj
j 4(k.) . xUb-is x).
вкачестве начальных значений оценок предлагаемого измерителя принимают первые пять измерений, т.е.хЧк-l) l(K-li, X (к-2) 1(к-2), ..., X (к-5) itK-5), а для известного устройства, соответственно
ииыи-ч).
.Начальные условия для измерителя с фильтром Калмана определяют на
основе фиксированной выборки из семи измерений и аппроксимации входного воздействия полиномом шестой степени.
Графики полу 1енных в ходе модужирования средних квадратических ошибок оценок приведены на фиг. 2 (для Следящего измерителя прототипа кривая q , предлагаемого следящего измерителя кривая Ъ и измерителя с фильтром Калмана, определяющего потенциальную точность, кривая б). Вследствие недостаточной устойчивости структуры, оценки, полученные с помощью известного
устройства (фиг. 2 а) , расходятся i для предлагаемого устройства
Дфиг. 2 6) практически соответству ют потенциально достижимой точности сглаживания (фиг. 25) что свидетельствует о более высокой точнести и .устойчивости измерений
на участках наблюдения малой дли- , тельности при сложной динамике объекта при использовании предложенного устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузьмин С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| М., Сов | |||
| радио, 1974, с | |||
| Телефонная трансляция с местной цепью для уничтожения обратного действия микрофона | 1924 |
|
SU348A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 878041, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| . | |||
