Изобретение относится к системам автоматического управления движущимися объектами, в частности к системам наведения телеуправляемых ракет, команды управления которыми известны и могут учитываться в системах сопровождения или визирования (визирование, в отличие от сопровождения, подразумевает возможность наличия активного ответного сигнала от ракеты).
Наибольшее распространение системы телеуправления получили в зенитных ракетных комплексах средней и малой дальности, таких, как «Найк-Геркулес» (США), «Кроталь» (Франция), «Рапира» (Великобритания), С-75, С-125, «Оса» (Россия) и др. (смотри, например, Василин Н.Я., Гуринович А.Л. «Зенитные ракетные комплексы». - Мн.: ООО «Попурри», 2002. - 464 с.). Во всех этих комплексах система сопровождения сигнала от ракеты аналогична системе сопровождения сигнала от цели. Это объясняется тем, что сопровождение сигнала от ракеты начинается в них с момента входа ракеты в область пространства, осматриваемую каким-либо информационным датчиком, следящим за целью (РЛС, оптико- или теплопеленгаторы), а потому угловые скорости и ускорения, которые должна отрабатывать система сопровождения ракеты, - небольшие и система сопровождения сигнала от ракеты отрабатывает их с ошибками значительно меньшими, чем сектор осматриваемого пространства.
Обобщенная структурная схема системы наведения телеуправляемой ракеты приведена в литературе (смотри, например, Неупокоев Ф.К. «Стрельба зенитными ракетами». - М.: Воениздат, 1980. - 243 с. или Орлов Е.В. «Проектирование систем телеуправления». - Ижевск: Издательский дом. Удмуртский университет, 2000. - 272 с.), где показано место системы сопровождения цели (ССЦ) и системы визирования ракеты (СВР) в общей структуре контура управления ракетой.
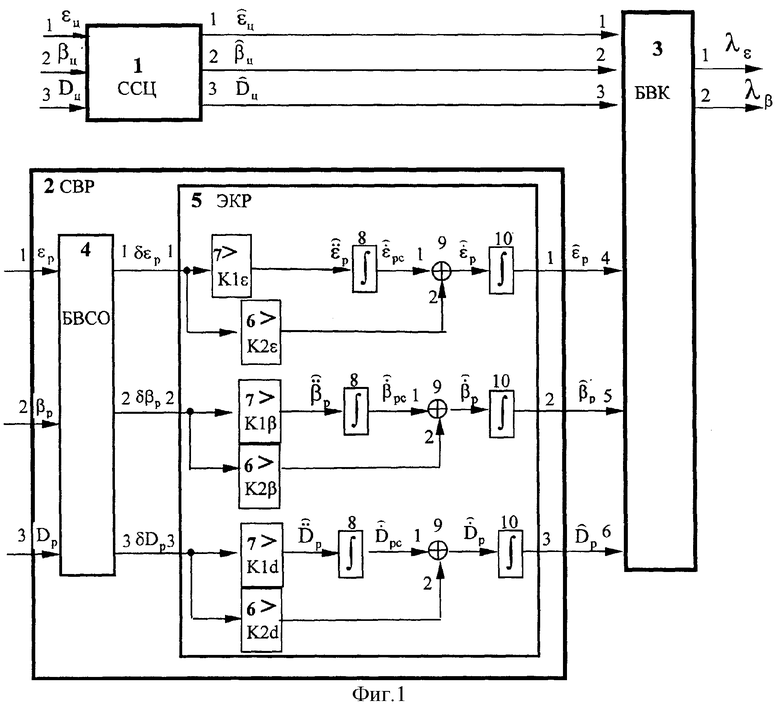
Каждая из этих систем должна минимизировать средний квадрат ошибки сопровождения, включающей в себя динамическую и флюктуационные составляющие. Оптимальная структура систем данного класса по теории автоматического управления определяется фильтром Калмана, в который закладывается модель движения сопровождаемого объекта. Подобная схема систем сопровождения реализована в ЗРС «Top-M1» (ЗРС «Top-M1». Техническое описание, Москва, 1990 г.). Эта схема приведена на фиг.1 и взята в качестве реализованного прототипа. При разработке ССЦ и СВР предполагалось, что управление как для цели, так и для ракеты неизвестно, поэтому блоки ССЦ и СВР имеют одинаковую структуру. В этих блоках функции следящих систем по угловым координатам и дальности выполняют экстраполяторы координат, обладающие астатизмом 2го порядка, а следовательно, имеющие динамическую ошибку, в основном зависящую от углового ускорения сопровождаемого объекта.
При вертикальном старте ракеты, который имеет принципиальное значение для корабельных ЗРК, или вообще при старте ракеты под большим углом к направлению визирования цели, угловые ускорения на малых дальностях полета ракеты очень большие и приводят к динамическим ошибкам, соизмеримым с апертурой информационного датчика, следящего за сигналом от ракеты. Ситуация усугубляется возможностью кратковременного пропадания сигнала, вследствие влияния плазмы факела ракеты и высокого уровня переотражений от местных предметов и подстилающей поверхности, характерных для этапов захвата и начала сопровождения сигнала ракеты.
Одним из способов уменьшения динамической ошибки СВР является уточнение модели сопровождаемого объекта за счет учета известной команды управления ею, что эквивалентно введению компенсационного сигнала по второй производной углового ускорения. Такая структурная схема ЭКР приведена в книге (Орлов Е.В. «Проектирование систем телеуправления», стр.63, рис.4.4), где компенсационный сигнал U определяется по формуле:

где λε - команда управления ракетой;
Dp - оценка дальности до ракеты;
 - передаточная функция замкнутого контура стабилизации ракеты.
- передаточная функция замкнутого контура стабилизации ракеты.
Приведенный вариант компенсации ошибки экстраполятора путем введения в него команды управления ракетой является теоретическим аналогом данного изобретения. Использование сигнала, определяемого по данной формуле, не учитывает нестационарность кинематики движения ракеты на этапах ближнего наведения, где динамика изменения углового ускорения представляется более сложной зависимостью, что снижает точность наведения ракеты.
Целью настоящего изобретения является разработка системы наведения телеуправляемой ракеты с минимальными ошибками сопровождения сигнала от ракеты при ее старте с большими углами к направлению визирования цели, в том числе и при вертикальном старте.
Поставленная цель достигается тем, что в систему наведения телеуправляемой ракеты, содержащую систему сопровождения цели (ССЦ), на входы которой поступают координаты цели: угол места, азимут и дальность, систему визирования ракеты (СВР), на входы которой поступают координаты ракеты: угол места, азимут и дальность, и блок выработки команд (БВК), при этом СВР содержит блок выделения сигнала ошибки (БВСО), первый, второй и третий входы которой являются входами СВР, и экстраполятор координат ракеты (ЭКР), первый, второй и третий входы которого соединены с соответствующими выходами СВР, три входа БВК соединены с соответствующими выходами ССЦ, а его четвертый, пятый и шестой входы соединены соответственно с первым, вторым и третьим выходами СВР, которыми являются выходы ЭКР, при этом ЭКР содержит первую, вторую и третью цепи, соответствующие координатам ракеты: угол места, азимут и дальность, а каждая цепь содержит первый масштабный блок и последовательно соединенные второй масштабный блок, первый интегратор, сумматор, второй интегратор, причем первый масштабный блок своим входом соединен со входом второго масштабного блока этой же цепи, а выходом - со вторым входом сумматора этой же цепи, при этом входы вторых масштабных блоков являются входами ЭКР, выходы вторых интеграторов - соответственно выходами ЭКР, а первый и второй выходы БВК являются выходами системы наведения телеуправляемой ракеты, дополнительно введен кинематический компенсатор, а в первую цепь ЭКР между вторым масштабным блоком и первым интегратором введен дополнительный сумматор, второй вход которого соединен с выходом кинематического компенсатора, первый вход которого соединен с первым выходом БВК, при этом кинематический компенсатор содержит блок задержки, устройство сравнения, третий масштабный блок, блок умножения и блок деления, причем вход блока задержки является первым входом компенсатора, а выход блока задержки соединен с первым входом устройства сравнения, второй вход которого соединен с выходом третьего масштабного блока, вход которого соединен с выходом блока умножения, первый вход которого является вторым входом кинематического компенсатора и соединен с выходом первого интегратора первой цепи ЭКР, а второй вход блока умножения соединен с выходом сумматора третьей цепи ЭКР, причем третий выход ЭКР соединен также и со вторым входом блока деления, первый вход которого соединен с выходом устройства сравнения, при этом выход блока деления является выходом кинематического компенсатора, а второй вход блока умножения и второй вход блока деления - соответственно третьим и четвертым входами кинематического компенсатора.
Заявляемое изобретение поясняется чертежами, где:
- на фиг.1 представлена схема системы наведения телеуправляемой ракеты, принятой в качестве прототипа;
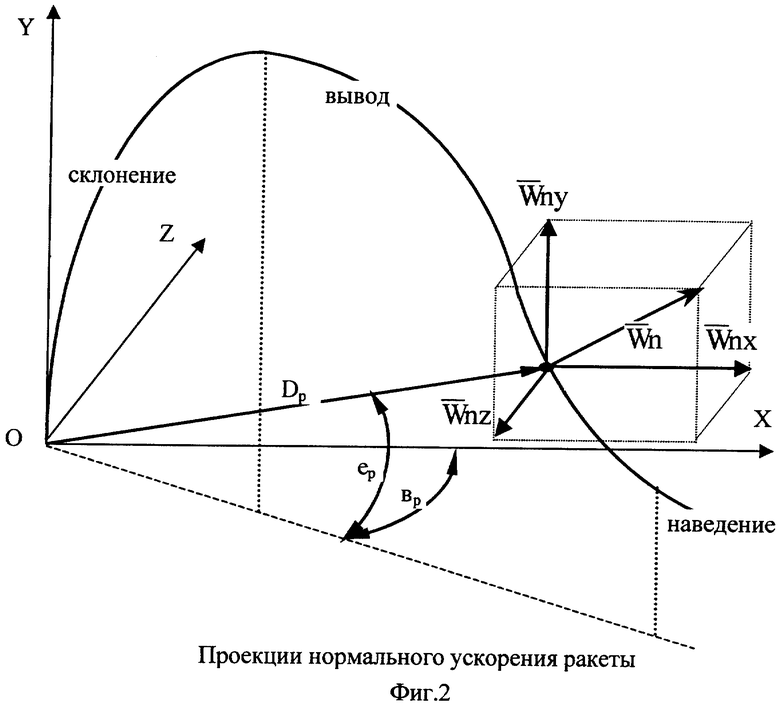
- на фиг.2 показаны проекции нормального ускорения ракеты;
- на фиг.3 показан график изменения скорости ракеты;
- на фиг.4 представлена схема заявляемой системы наведения телеуправляемой ракеты.
На фиг.1, 4 введены следующие обозначения:
εp, δεp,  ,
,  ,
,  ,
,  - угол места ракеты, сигнал ошибки сопровождения по углу места на выходе БВСО, оценки координаты угла места и угловой скорости - несмещенные и сглаженные и ускорения на выходах ЭКР по каналу угла места, соответственно;
- угол места ракеты, сигнал ошибки сопровождения по углу места на выходе БВСО, оценки координаты угла места и угловой скорости - несмещенные и сглаженные и ускорения на выходах ЭКР по каналу угла места, соответственно;
βp, δβp,  ,
,  ,
,  ,
,  - то же по каналу азимута;
- то же по каналу азимута;
Dp,  ,
,  ,
,  ,
,  - то же по каналу дальности;
- то же по каналу дальности;
εц,  , βц,
, βц,  , Dц,
, Dц,  - координаты цели и их оценки;
- координаты цели и их оценки;
λβ, λε - команды управления замкнутого контура, выработанные БВК;
K1, К2 - коэффициенты экстраполяции по ускорению и скорости;
τзад - величина временной задержки команды;
 - оценка кинематического углового ускорения линии визирования ракеты в вертикальной плоскости;
- оценка кинематического углового ускорения линии визирования ракеты в вертикальной плоскости;
Ккин - величина коэффициента кинематической компенсации.
Заявляемая система наведения телеуправляемой ракеты (см. фиг.4) содержит систему сопровождения цели (ССЦ) (1), на входы которой поступают координаты цели: угол места, азимут и дальность, систему визирования ракеты (СВР) (2), на входы которой поступают координаты ракеты: угол места, азимут и дальность, и блок выработки команд (БВК) (3). СВР (2) содержит блок выделения сигнала ошибки (4), первый, второй и третий входы которой являются входами СВР (2), и экстраполятор координат ракеты (ЭКР) (5), первый, второй и третий входы которого соединены с соответствующими выходами БВСО (4). Три входа БВК (3) соединены с соответствующими выходами ССЦ (1), а его четвертый, пятый и шестой входы соединены соответственно с первым, вторым и третьим выходами СВР (2), которыми являются выходы ЭКР (5). ЭКР (5) содержит первую, вторую и третьи цепи, соответствующие координатам ракеты: угол места, азимут и дальность, а каждая цепь содержит первый масштабный блок (6) и последовательно соединенные второй масштабный блок (7), первый интегратор (8), сумматор (9), второй интегратор (10), причем первый масштабный блок (6) своим входом соединен со входом второго масштабного блока (7) этой же цепи, а выходом - со вторым входом сумматора (9) этой же цепи, при этом входы вторых масштабных блоков являются входами ЭКР (5), выходы вторых интеграторов (10) - соответственно выходами ЭКР (5), а первый и второй выходы БВК (3) являются выходами системы наведения телеуправляемой ракеты. В первую цепь ЭКР (5) между вторым масштабным блоком (7) и первым интегратором (8) введен дополнительный сумматор (11), второй вход которого соединен с выходом кинематического компенсатора (12), первый вход которого соединен с первым выходом БВК (3). Кинематический компенсатор (12) содержит блок задержки (13), устройство сравнения (14), третий масштабный блок (15), блок умножения (16) и блок деления (17), причем вход блока задержки (13) является первым входом компенсатора (12), а выход блока задержки (13) соединен с первым входом устройства сравнения (14), второй вход которого соединен с выходом третьего масштабного блока (15), вход которого соединен с выходом блока умножения (16), первый вход которого является вторым входом кинематического компенсатора (12) и соединен с выходом первого интегратора (8) первой цепи ЭКР (5), а второй вход блока умножения (16) соединен с выходом сумматора (9) третьей цепи ЭКР (5). Третий выход ЭКР (5) также соединен и со вторым входом блока деления (17), первый вход которого соединен с выходом устройства сравнения (14). Выход блока деления (17) является выходом кинематического компенсатора, а второй вход блока умножения (16) и второй вход блока деления (17) - соответственно третьим и четвертым входами кинематического компенсатора (12). ССЦ (1) (см. фиг.4) имеет такую же структуру, как СВР (2).
Заявляемая система наведения работает следующим образом.
При изменении положения цели в пространстве, определяемого координатами угла места εц, азимута βц и наклонной дальности цели Dц в инерциальной системе координат, связанной с платформой визирного устройства ЗРК, ССЦ (1) - например в случае, если это радиолокатор сопровождения, измеряет пространственное рассогласование импульсов электромагнитной энергии, отраженных от цели, относительно линии визирования и их временную задержку. Выделенный сигнал ошибки сопровождения по трем координатам экстраполируется для продолжения сопровождения, образуя оптимальные оценки координат  ,
,  ,
,  . Конструктивная реализация экстраполятора может быть различной, а именно:
. Конструктивная реализация экстраполятора может быть различной, а именно:
аналоговая силовая следящая система с электроприводом и датчиками положения по углу места и азимуту - для РЛС с электромеханическим антенным устройством (аналог - например, ЗРК «Оса» (Россия));
комбинированная следящая система с электронным аналоговым либо цифровым первым интегратором и электромеханическим интегрирующим силовым приводом с датчиками углового положения (аналог - смотри, например: Coeuillet J. La precision de pointage des antennes de poursuite automatique. Revue technique THOMSON - CSF, 1970, №1, volume 2, pages 57-90);
комбинированная двухконтурная следящая система с электромеханическим силовым приводом антенны с электронным сканированием типа фазированной антенной решетки (ФАР) и электронной цифроаналоговой системой точного сопровождения по углам с помощью системы управления лучом (СУЛ) ФАР (аналог - например, ЗРС «Тор» (Россия));
аналоговая, цифроаналоговая или цифровая следящая система по дальности.
В современных системах оптимальная структура экстраполятора в ССЦ (1) определяется фильтром Калмана, в который закладывается модель движения цели либо в неподвижной прямоугольной (смотри, например: Лавров Н.Ф. Вопросы теории ПУАЗО. М.: Оборонгиз, 1960), либо в подвижной сферической (смотри, например: Coeuillet J. La precision de pointage des antennes de poursuite automatique. Revue technique THOMSON - CSF, 1970, №1, volume 2, pages 57-90) системах координат. Необходимые электрические сигналы для формирования управления в фильтре Калмана реализуются либо аналоговыми схемами счетно-решающих приборов (СРП): умножителями, стандартными усилителями, приборными следящими системами, преобразователями координат, либо цифроаналоговыми схемами: ЦАП, АЦП, умножающими ЦАП, АЛУ, матрицами ПЗУ, либо в дискретной схемотехнике - ПЛИС ах или СЦВМ. Сигналы оптимальных оценок координат  ,
,  ,
,  с выхода ССЦ (1) поступают на первый, второй и третий входы БВК (3). На четвертый, пятый и шестой входы БВК (3) поступают аналогичные сигналы по ракетному каналу с выхода СВР (2) -
с выхода ССЦ (1) поступают на первый, второй и третий входы БВК (3). На четвертый, пятый и шестой входы БВК (3) поступают аналогичные сигналы по ракетному каналу с выхода СВР (2) -  ,
,  ,
,  .
.
СВР (2) по структуре аналогична ССЦ (1) и, соответственно, при реализации в виде РЛС, принимает сигнал радиомаяка ракеты и с помощью БВСО (4) измеряет сигналы ошибок визирования δεр, δβр, δDp по трем координатам и экстраполирует их в интервале между сеансами связи с ракетой для продолжения визирования. В данном случае БВСО (4) включает антенну, приемник и схему нормировки сигналов ошибки. При использовании в ЗРК антенны типа ФАР она является общей для ССЦ (1) и СВР (2), в этом случае осуществляется электронное визирование с помощью СУЛ а по углам и измерителя задержки по дальности.
Сигналы ошибок δεр, δβр, δDp в виде напряжений постоянного тока при аналоговой реализации БВСО (4), или в виде их цифровых эквивалентов, при цифроаналоговой или цифровой реализации поступают на входы трехканального ЭКР со структурой фильтра Калмана 2го порядка. Следящая система СВР (2) замыкается через эфир по сигналу радиомаяка ракеты. Конструктивная реализация ЭКР (5) может быть различной, а именно:
Аналоговая следящая система с электроприводом и датчиками положения по углу места и азимуту - для РЛС с электромеханическим антенным устройством СВР (аналог - например, ЗРК «Оса» (Россия));
цифроаналоговая следящая система по углам с помощью СУЛ ФАР (аналог - например, ЗРС «Тор» (Россия));
аналоговая, цифроаналоговая или цифровая следящая система по дальности.
В зависимости от вида реализации элементы каждого канала ЭКР (5) имеют соответствующее исполнение:
аналоговое - стандартные усилители для масштабных блоков (6), (7) первого интегратора (8), первого сумматора (9), второго сумматора (11), второго интегратора (10) в канале дальности и интегрирующий привод с датчиками положения для второго интегратора (10) в угловых каналах;
цифроаналоговое на дискретных элементах - АЦП на входе, АЛУ или регистры сдвига для масштабных блоков (6), (7), накапливающие сумматоры для первого (8) и второго (10) интеграторов, АЛУ для первого (9) и дополнительного (11) сумматоров;
цифровое программно-аппаратное - ПЛИС или СЦВМ с программным обеспечением.
Независимо от вида реализации ЭКР (5) формирует сигналы, пропорциональные в некотором масштабе оптимальным оценкам в соответствии с коэффициентами экстраполяции по ускорению К1ε, К1β, K1d, заложенными в блоки (7), и коэффициентами экстраполяции по скорости К1ε, К1β, K1d, заложенными в блоки (6). В соответствии со схемой ЭКР (5) образуются сигналы оценок:
вторых производных координат  ,
,  ,
,  на входах первых интеграторов (8);
на входах первых интеграторов (8);
первых производных координат, сглаженных  ,
,  ,
,  на выходах первых интеграторов (8);
на выходах первых интеграторов (8);
первых производных координат, несмещенных 

 на входах вторых интеграторов (10);
на входах вторых интеграторов (10);
координат 

 на выходах вторых интеграторов (10).
на выходах вторых интеграторов (10).
С первого, второго и третьего выходов ЭКР (5) сигналы оценок  ,
,  ,
,  поступают на четвертый, пятый и шестой входы БВК (3). БВК (3) - это вычислительное устройство, аналоговое (СРП), цифроаналоговое на дискретных элементах (ПЛИС, АЦП, ЦАП, ПЗУ и др.), либо цифровое (СЦВМ) с программным обеспечением. БВК (3) в зависимости от заложенного метода наведения ракеты на основе входных оценок - координат цели и ракеты вырабатывает сигналы команд управления ракетой в вертикальной λε - на выходе 1 и боковой λβ - на выходе 2 плоскостях соответственно. Этими командами, переданными аппаратурой ЗРК на борт, телеуправляемая ракета наводится на цель.
поступают на четвертый, пятый и шестой входы БВК (3). БВК (3) - это вычислительное устройство, аналоговое (СРП), цифроаналоговое на дискретных элементах (ПЛИС, АЦП, ЦАП, ПЗУ и др.), либо цифровое (СЦВМ) с программным обеспечением. БВК (3) в зависимости от заложенного метода наведения ракеты на основе входных оценок - координат цели и ракеты вырабатывает сигналы команд управления ракетой в вертикальной λε - на выходе 1 и боковой λβ - на выходе 2 плоскостях соответственно. Этими командами, переданными аппаратурой ЗРК на борт, телеуправляемая ракета наводится на цель.
В заявляемой системе для уменьшения ошибки визирования ракеты в вертикальной плоскости применена схема кинематической компенсации в угломестном канале ЭКР (5). В соответствии со структурой фильтра Калмана, для этого сигнал с выхода масштабного блока (7) первого канала ЭКР (5) необходимо на входе первого интегратора (8) просуммировать с сигналом управления U, соответствующим  - оценке кинематического углового ускорения линии визирования ракеты в вертикальной плоскости. Как показано ниже, оценка
- оценке кинематического углового ускорения линии визирования ракеты в вертикальной плоскости. Как показано ниже, оценка  может быть сформирована в соответствии с формулой
может быть сформирована в соответствии с формулой

где Ккин и τзад - конструктивные параметры конкретной системы наведения, а остальные величины вырабатываются БВК (3) и ЭКР (5) системы.
Для реализации управления U в систему кроме дополнительного сумматора (11) введен кинематический компенсатор (12) и образованы дополнительные связи, как показано на фиг.4. Кинематический компенсатор (12) - это вычислительное устройство, аналоговое (СРП), цифроаналоговое на дискретных элементах (ПЛИС, АЦП, ЦАП, ПЗУ и др.), либо цифровое (СЦВМ) с программным обеспечением, выполняющее операции над сигналами в соответствии с формулой (II). На его первый вход поступает сигнал команды управления λε с первого выхода БВК (3), который задерживается в блоке задержки (13) на величину τзад.
В аналоговом исполнении блок (13) - это аналоговая ячейка памяти (порт), например, типа микросхем серии 1100 СК1, СК2 или им подобных, в цифровом - регистр или ОЗУ, в СЦВМ - программируемая задержка.
На второй вход компенсатора (12) поступает сигнал оценки  с выхода первого интегратора (8) канала угла места ЭКР (5), который далее в блоке умножения (16) умножается на сигнал оценки
с выхода первого интегратора (8) канала угла места ЭКР (5), который далее в блоке умножения (16) умножается на сигнал оценки  с выхода первого сумматора (9) канала дальности ЭКР, поступающий на третий вход компенсатора (12).
с выхода первого сумматора (9) канала дальности ЭКР, поступающий на третий вход компенсатора (12).
В аналоговом исполнении блок (16) - это схема на стандартных усилителях с квадраторами, или время - импульсная схема умножения (см., например, Г.Корн и Т.Корн. Электронные аналоговые и аналого-цифровые вычислительные машины. М., Мир, 1967 г.), или схема на стандартных усилителях с балансным модулятором типа микросхемы 140МА2; в цифроаналоговом - умножающий АЦП типа микросхем серии 572 ПА; в цифровом - матрица умножения типа микросхемы 1802 ВР или ПЛИС, в СЦВМ - стандартная подпрограмма.
С выхода блока умножения (16) сигнал произведения оценок  подается на вход масштабного блока (15) для умножения на константу Ккин, после чего сигнал результата умножения -
подается на вход масштабного блока (15) для умножения на константу Ккин, после чего сигнал результата умножения -  подается на второй - инверсный вход устройства сравнения (14), на первый вход которого подается сигнал задержанной команды с выхода блока (13)
подается на второй - инверсный вход устройства сравнения (14), на первый вход которого подается сигнал задержанной команды с выхода блока (13)

в результате чего на выходе устройства сравнения (14) образуется сигнал разности

В аналоговом исполнении устройство сравнения (14) и масштабный блок (15) реализуются на стандартных усилителях, в цифроаналоговом - на сумматоре, ПЗУ и умножающем АЦП, в дискретной схемотехнике - АЛУ, регистре сдвига, ПЛИС, в СЦВМ - стандартными подпрограммами.
С выхода устройства сравнения (14) сигнал разности U (IV) подается на первый вход делимого блока деления (17), на второй вход делителя которого подается сигнал оценки  с четвертого входа компенсатора (12), поступающий с третьего выхода канала дальности ЭКР (5). В результате выполнения операции деления на выходе блока деления (17) образуется требуемый сигнал U (II), который в качестве выходного сигнала компенсатора (12) поступает на второй вход дополнительного сумматора (11) канала угла места ЭКР (5).
с четвертого входа компенсатора (12), поступающий с третьего выхода канала дальности ЭКР (5). В результате выполнения операции деления на выходе блока деления (17) образуется требуемый сигнал U (II), который в качестве выходного сигнала компенсатора (12) поступает на второй вход дополнительного сумматора (11) канала угла места ЭКР (5).
В аналоговом исполнении блок деления (17) реализуется на стандартных усилителях с блоком умножения в цепи обратной связи (см., например, Г.Корн и Т.Корн. Электронные аналоговые и аналого-цифровые вычислительные машины. М., Мир, 1967 г.), в цифроаналоговом - на умножающем АЦП с обратной матрицей ПЗУ, в дискретной схемотехнике - умножающей матрице с ПЗУ, ПЛИС, в СЦВМ - стандартными подпрограммами.
Сформированный таким образом сигнал управления U (II) уменьшает ошибку визирования в угломестном канале ЭКР (5), повышая точность и помехоустойчивость системы наведения.
Как отмечено выше, наибольшие ошибки возникают в экстраполяторе в режиме вывода ракеты на кинематическую траекторию, особенно для ЗРК с вертикальным стартом ракеты при работе в ближней нижней границе зоны поражения ЗРК. В этом случае полет ракеты происходит в режиме разгона до максимальной скорости и при интенсивном маневре в вертикальной плоскости, т.е. существенно нестационарном, при более сложной пространственной кинематике движения.
Действительно (смотри, например, Неупокоев Ф.К. «Стрельба зенитными ракетами». - М.: Воениздат, 1980. - 243 с.), при наведении ЗУР справедливы кинематические соотношения для вектора мгновенного нормального ускорения  в виде:
в виде:



где  , v - скорость ракеты и
, v - скорость ракеты и  ,
,  ,
,  - проекции
- проекции  на оси инерциальной системы OXYZ, согласно фиг.2.
на оси инерциальной системы OXYZ, согласно фиг.2.
Вводя обозначение 
получим для ускорения в вертикальной плоскости выражение

Для боковой составляющей соответственно

При использовании этих уравнений для анализа угловых ускорений линии визирования ракеты (ЛВР) параметр ℵ, зависящий от летно-баллистических характеристик ракеты, в первом приближении можно считать известной функцией времени. Более того, покажем, что на этапе вывода на ближнюю нижнюю границу зоны поражения ЗРК, критическую по критерию несрыва сопровождения ракеты, величину ℵ можно принять линейной функцией.
Действительно, рассматривая типовой график скорости ракеты на фиг.3, отмечаем, что тяга двигателя на этапе разгона, совпадающем по фазе с выводом в указанную точку зоны, постоянна, т.е. движение происходит по закону

Приняв приближенно  , получим
, получим

Поскольку на борту ракеты автопилотом устанавливается однозначная связь между командой управления и нормальной перегрузкой, т.к. отработка команд λε, λβ осуществляется с обратной связью от датчиков линейных ускорений - акселерометров ракеты, то с точностью до передаточной функции звена «ракета с автопилотом», которая может учитываться в БВК (3), справедливы соотношения

Анализируя движение без перекрестной кинематической связи каналов εp и βp, т.е. полагая

что справедливо при выводе ракеты в указанных условиях при  , получим в итоге
, получим в итоге

Таким образом, мы перешли от кинематического уравнения к формуле связи сигналов в БВК (3) и ЭКР (5), которая позволяет осуществить оценку текущего углового ускорения ЛВР  , т.е. выработать значение оценки
, т.е. выработать значение оценки  - компенсационного сигнала, по величине λε, взятой из БВК (3), и величинам
- компенсационного сигнала, по величине λε, взятой из БВК (3), и величинам  ,
,  ,
,  , взятым из ЭКР (5), в виде:
, взятым из ЭКР (5), в виде:

Сглаженное значение принимается в качестве оценки величины  с целью снижения флюктуаций компенсационного сигнала.
с целью снижения флюктуаций компенсационного сигнала.
Поскольку контур управления дискретный, то для использования в ЭКР (5) значение λε, выработанное в БВК (3), должно быть задержано на время одного цикла - 1 Тц. Кроме того, полученное аналитически значение 1,5 при замене величины ℵ величиной , в силу принятых допущений, в реальном ЗРК может иметь некоторые отличия в диапазоне (1,5...2), поэтому введем вместо этого значения константу - коэффициент кинематики - Kкин.
По данному изобретению была разработана математическая модель контура управления с ЭКР (5). Результаты моделирования при наведении в ближнюю нижнюю точку зоны поражения показали, что даже при наличии пропуска сигнала введение компенсации обеспечивает несрыв сопровождения за счет уменьшения ошибки сопровождения, достигаемого путем введения обратной связи по команде управления ракетой.
Заявляемое устройство может быть технически реализовано путем изменения алгоритмов БЦВМ при цифровой реализации или введения дополнительных стандартных усилителей в систему СВР, реализующих предлагаемый алгоритм компенсации. Это позволяет сделать вывод о его промышленной применимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА ПРИЕМА И РЕАЛИЗАЦИИ ЦЕЛЕУКАЗАНИЯ | 2002 |
|
RU2236666C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ ПУСКА РАКЕТ ДЛЯ ПОДВИЖНЫХ ПУСКОВЫХ УСТАНОВОК | 2012 |
|
RU2504725C2 |
Изобретение относится к системам автоматического управления движущимися объектами и может быть использовано в системах наведения телеуправляемых ракет. Технический результат - уменьшение ошибок сопровождения сигнала от ракеты при ее старте с большими углами к направлению визирования цели, в том числе и при вертикальном старте. Система наведения телеуправляемой ракеты содержит систему сопровождения цели (ССЦ), на входы которой поступают координаты цели: угол места, азимут и дальность, систему визирования ракеты (СВР), на входы которой поступают координаты ракеты: угол места, азимут и дальность, и блок выработки команд (БВК). При этом СВР содержит блок выделения сигнала ошибки (БВСО) и экстраполятор координат ракеты (ЭКР). ЭКР содержит первую, вторую и третью цепи, соответствующие координатам ракеты: угол места, азимут и дальность, а каждая цепь содержит первый масштабный блок и последовательно соединенные второй масштабный блок, первый интегратор, сумматор, второй интегратор. Система также содержит кинематический компенсатор, а в первую цепь ЭКР между вторым масштабным блоком и первым интегратором введен дополнительный сумматор. Кинематический компенсатор содержит блок задержки, устройство сравнения, третий масштабный блок, блок умножения и блок деления. 4 ил.
Система наведения телеуправляемой ракеты, содержащая систему сопровождения цели (ССЦ), входы которой предназначены для приема сигналов координат цели: угла места, азимута и дальности, систему визирования ракеты (СВР), входы которой предназначены для приема сигналов координат ракеты: угла места, азимута и дальности, и блок выработки команд (БВК), при этом СВР содержит блок выделения сигнала ошибки (БВСО), первый, второй и третий входы которой являются входами СВР, и экстраполятор координат ракеты (ЭКР), первый, второй и третий входы которого соединены с соответствующими выходами БВСО, три входа БВК соединены с соответствующими выходами ССЦ, а его четвертый, пятый и шестой входы соединены, соответственно, с первым, вторым и третьим выходами СВР, которыми являются выходы ЭКР, при этом ЭКР содержит первую, вторую и третью цепи, соответствующие координатам ракеты: угол места, азимут и дальность, а каждая цепь содержит первый масштабный блок и последовательно соединенные второй масштабный блок, первый интегратор, сумматор, второй интегратор, причем первый масштабный блок своим входом соединен с входом второго масштабного блока этой же цепи, а выходом - со вторым входом сумматора этой же цепи, при этом входы вторых масштабных блоков являются входами ЭКР, выходы вторых интеграторов - соответственно, выходами ЭКР, а первый и второй выходы БВК являются выходами системы наведения телеуправляемой ракеты, отличающаяся тем, что она снабжена кинематическим компенсатором, а в первую цепь ЭКР между вторым масштабным блоком и первым интегратором введен дополнительный сумматор, второй вход которого соединен с выходом кинематического компенсатора, первый вход которого соединен с первым выходом БВК, при этом кинематический компенсатор содержит блок задержки, устройство сравнения, третий масштабный блок, блок умножения и блок деления, причем вход блока задержки является первым входом компенсатора, а выход блока задержки соединен с первым входом устройства сравнения, второй вход которого соединен с выходом третьего масштабного блока, вход которого соединен с выходом блока умножения, первый вход которого является вторым входом кинематического компенсатора и соединен с выходом первого интегратора первой цепи ЭКР, а второй вход блока умножения соединен с выходом сумматора третьей цепи ЭКР, причем третий выход ЭКР соединен также и со вторым входом блока деления, первый вход которого соединен с выходом устройства сравнения, при этом выход блока деления является выходом кинематического компенсатора, а второй вход блока умножения и второй вход блока деления - соответственно третьим и четвертым входами кинематического компенсатора.
| СИСТЕМА ТЕЛЕНАВЕДЕНИЯ | 2000 |
|
RU2172919C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| US 4721270 A, 26.01.1988 | |||
| DE 3034838 C1, 29.11.1990. | |||

