Изобретение относится к области приборостроения и может быть использовано для повышения точности выведения подвижного объекта, в частности летательного аппарата (ЛА) с бортовой телевизионной или радиотехнической системой, в заданную область инерциального пространства на основе проектирования и применения комплексных навигационных систем, включающих бесплатформенную инерциальную навигационную систему и неавтономную радионавигационную систему.
Известна комплексная навигационная система с адаптивной коррекцией [1, заявка №92010523/28, МПК6 G01C 21/00, опубл. 20.12.1996]. Для повышения точности измерения навигационных параметров в комплексную навигационную систему вместо оптимального фильтра включен адаптивный фильтр и введена отрицательная обратная связь. Разностная величина, формируемая из значений навигационных параметров инерциальной навигационной системы и полученных после фильтрации оценок этих значений с выхода комплексной системы, используется для адаптивной коррекции коэффициента усиления фильтра. Это позволяет отслеживать нарастание ошибок и корректировать выходную информацию комплексной навигационной системы.
Недостатком данной системы является обусловленное ошибками первичных измерителей (акселерометров и гироскопов) накопление ошибок инерциальной навигации при прекращения связи с другими навигационными системами в составе комплексной навигационной системы, так как коррекции подвергается только выходная информация комплексной навигационной системы.
Известна инерциально-спутниковая навигационная система (ИСНС) с комбинированным использованием спутниковых данных [2, патент №2334199, МПК-8 G01C 23/00, опубл. 20.09.2008, бюл. №26], содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников. Блок начальной установки альманаха данных о спутниках подключен выходами к второй группе входов вычислителя местоположения спутников. Таймер подключен выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников. При этом повышение отказоустойчивости системы осуществляется за счет резервирования функций блоков обработки спутниковой информации.
Известна инерциально-спутниковая навигационная система [3, патент №2233431, МПК8 G01C 23/00, опубл. 27.07.2004], в которой осуществляется коррекция составляющих скорости приемника спутниковой навигационной системы (СНС) с использованием его координат и в контур интегрированного канала навигации инерциально-спутниковой навигационной системы вместо скоростей с приемника СНС поступают его скорректированные скорости с заданной задержкой корректирующего сигнала, формируемого вторым фильтром коррекции, в результате чего исключается влияние не только шумов, но и систематических ошибок по скорости и координатам приемника СНС на точность интегрированного канала навигации ИСНС.
Недостатком второго и третьего аналогов является то, что при отсутствии радиосигналов от СНС, например вследствие воздействия помех, ошибки инерциальной навигации возрастают из-за наличия погрешностей акселерометров и гироскопов.
Наиболее близким по технической сущности является инерциальная навигационная система (ИНС) [4, патент №1840258, МПК8 G01C 19/00, опубл. 10.09.2006, бюл. №25]. Система содержит блок трех акселерометров с ортогональными осями чувствительности, жестко установленный на подвижном объекте, и блок определения матрицы угловой ориентации подвижного объекта. Кроме того, в систему дополнительно введены n последовательно соединенных трехканальных интеграторов, задатчик временного режима работы трехканальных интеграторов, блок вычисления производных матрицы угловой ориентации, блок выработки приращений скоростей, блок выработки приращений перемещений, блок выработки координат и скоростей объекта.
Одним из способов повышения точности такой ИНС является коррекция ее показаний по данным внешней неавтономной радионавигационной системы (НРНС) [5, Андреев В.Д. Теория инерциальной навигации. Корректируемые системы. - М.: Наука, 1967. - 648 с.].
Однако недостатком такой комплексной инерциально-радионавигационной системы является увеличение ошибок инерциальной навигации подвижного объекта с течением времени, обусловленное влиянием инструментальных погрешностей первичных измерителей ИНС (акселерометров и гироскопов) при нарушении радиосвязи с НРНС, т.е. при последующей автономной некорректированной работе ИНС.
Техническим результатом заявляемого технического решения является повышение точности автономной работы инерциальной навигационной системы при прерывании радиосвязи с внешней неавтономной радионавигационной системой.
Указанный результат достигается тем, что инерциально-радионавигационная система, содержащая жестко установленные на подвижном объекте три акселерометра с ортогональными осями чувствительности, блок определения матрицы угловой ориентации объекта, блок вычисления производных матрицы угловой ориентации, соединенные последовательно блок выработки приращений скоростей, блок выработки скоростей объекта, блок выработки приращений перемещений и блок выработки координат объекта, отличается тем, что в нее дополнительно введены жестко установленные по ортогональным осям чувствительности подвижного объекта с первого по третий гироскопы, блок оценки гравитационного ускорения, неавтономная радионавигационная система, соединенная посредством радиолинии с блоком бортовой радиоаппаратуры объекта, блок оценки инструментальных погрешностей, с первого по пятый блоки коррекции, сумматор, блок определения кажущихся ускорений, первый и второй блоки вычитания, при этом первые входы с первого по пятый блоков коррекции соединены с выходами с первого по третий акселерометров, первого и второго гироскопов соответственно, выходы первого, второго и третьего блоков коррекции соединены соответственно с первым, вторым и третьим входами блока определения кажущихся ускорений, соединенного четвертым входом с входом блока вычисления производных матрицы угловой ориентации и выходом блока определения матрицы угловой ориентации объекта, первый, второй и третий входы которого соединены с выходами четвертого и пятого блоков коррекции и третьего гироскопа соответственно, выход блока определения кажущихся ускорений подключен к первому входу сумматора, соединенного выходом с входом блока выработки приращений скоростей, а вторым входом - с блоком оценки гравитационного ускорения, вход которого соединен с выходом блока выработки координат объекта, на второй вход которого подаются сигналы начальных координат объекта, на второй вход блока выработки скоростей объекта подаются сигналы начальных скоростей объекта, выходы блоков выработки скоростей объекта, выработки координат объекта, блока бортовой радиоаппаратуры объекта и блока вычисления производных матрицы угловой ориентации соединены соответственно с первого по четвертый входами блока оценки инструментальных погрешностей, с первого по седьмой выходы которого соединены соответственно с вторыми входами первого и второго блоков вычитания и вторыми входами с первого по пятый блоков коррекции, выходы блоков выработки скоростей объекта и выработки координат объекта соединены соответственно с первыми входами первого и второго блоков вычитания, на выходах которых формируются сигналы оценок проекций скорости объекта и координат объекта соответственно.
Суть заявляемого устройства поясняется чертежами.
На фиг.1 представлена функциональная схема инерциально-радионавигационной системы;
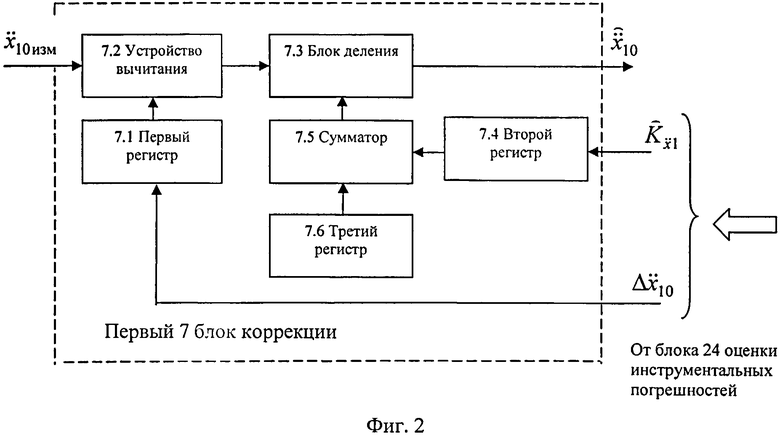
на фиг.2 - функциональная схема первого блока коррекции;
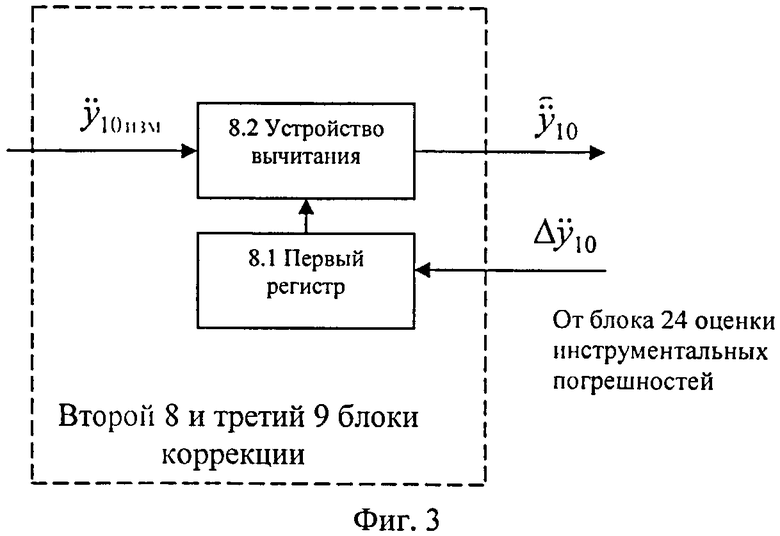
на фиг.3 - функциональная схема второго и третьего блоков коррекции;
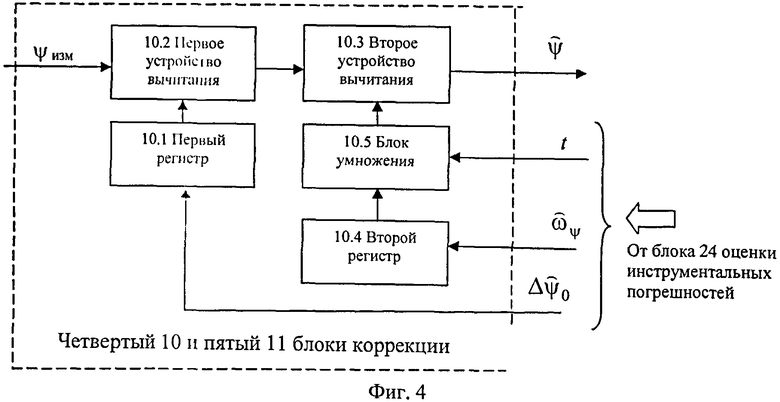
на фиг.4 - функциональная схема четвертого и пятого блоков коррекции;
на фиг.5 - графики изменения ошибок оценивания смещения нуля акселерометра и изменения наклона статической характеристики акселерометра;
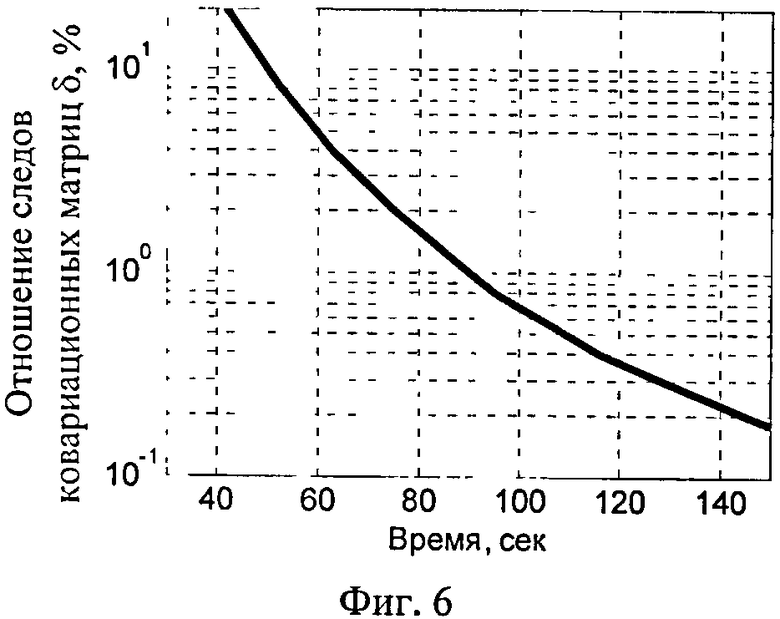
на фиг.6 - график изменения отношения следов ковариационных матриц;
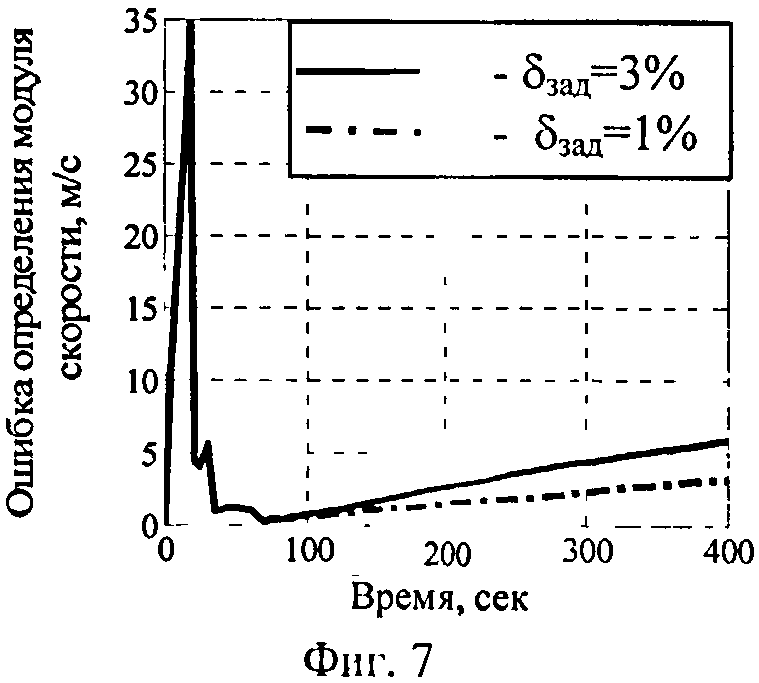
на фиг.7 - графики изменения модулей ошибок определения скорости подвижного объекта;
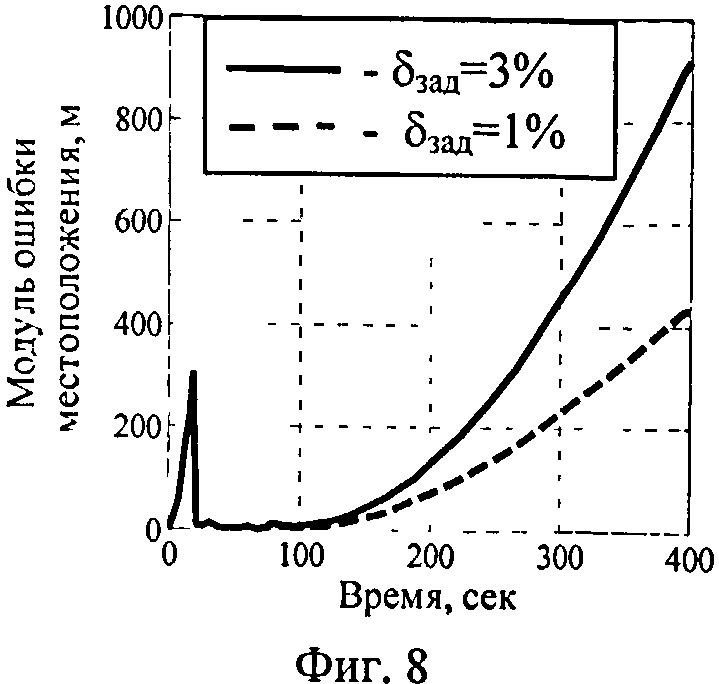
на фиг.8 - графики изменения модулей ошибок определения координат подвижного объекта.
Инерциально-радионавигационная система (фиг.1) содержит с первого по третий акселерометры 1-3, с первого по третий гироскопы 4-6, с первого по пятый блоки 7-11 коррекции, блок 12 определения кажущихся ускорений, блок 13 определения матрицы угловой ориентации объекта, блок 14 вычисления производных матрицы угловой ориентации, блок 15 оценки гравитационного ускорения, сумматор 16, последовательно соединенные блок 17 выработки приращений скорости, блок 18 выработки скоростей объекта, блок 19 выработки приращений перемещений и блок 20 выработки координат объекта, неавтономную радионавигационную систему 21, радиолинию 22, блок 23 бортовой радиоаппаратуры объекта, блок 24 оценки инструментальных погрешностей, первый и второй блоки 25 и 26 вычитания.
В инерциально-радионавигационной системе соединены последовательно блок 17 выработки приращений скоростей, блок 18 выработки скоростей объекта, блок 19 выработки приращений перемещений и блок 20 выработки координат объекта. Неавтономная радионавигационная система 21 посредством радиолинии 22 соединена с блоком 23 бортовой радиоаппаратуры объекта. Первые входы с первого по пятый блоков 7-11 коррекции соединены с выходами с первого по третий акселерометров 1-3, первого и второго гироскопов 4 и 5 соответственно. Выходы первого, второго и третьего блоков 7-9 коррекции соединены соответственно с первым, вторым и третьим входами блока 12 определения кажущихся ускорений, четвертый вход которого соединен с входом блока 14 вычисления производных матрицы угловой ориентации и выходом блока 13 определения матрицы угловой ориентации объекта. Первый, второй и третий входы блока 13 определения матрицы угловой ориентации объекта соединены с выходами четвертого и пятого блоков 10 и 11 коррекции и третьего гироскопа 6 соответственно. Выход блока 12 определения кажущихся ускорений подключен к первому входу сумматора 16, соединенного выходом с входом блока 17 выработки приращений скоростей, а вторым входом - с блоком 15 оценки гравитационного ускорения.
Вход блока 15 оценки гравитационного ускорения соединен с выходом блока 20 выработки координат объекта, на второй вход которого подаются сигналы начальных координат объекта. На второй вход блока 18 выработки скоростей объекта подаются сигналы начальных скоростей объекта. Выходы блока 18 выработки скоростей объекта, блока 20 выработки координат объекта, блока 23 бортовой радиоаппаратуры объекта и блока 14 вычисления производных матрицы угловой ориентации соединены соответственно с первого по четвертый входами блока 24 оценки инструментальных погрешностей. С первого по седьмой выходы блока 24 оценки инструментальных погрешностей соединены соответственно с вторыми входами первого и второго блоков 25 и 26 вычитания и вторыми входами с первого по пятый блоков 7-11 коррекции. Выходы блока 18 выработки скоростей объекта и блока 20 выработки координат объекта соединены соответственно с первыми входами первого и второго блоков 25 и 26 вычитания, на выходах которых формируются сигналы оценок проекций скорости объекта и координат объекта соответственно.
Инерциально-радионавигационная система работает следующим образом. В исходном состоянии с блока 24 оценки инструментальных погрешностей выдаются выходные сигналы, соответствующие нулевым значениям поправок как для вторых входов с первого по пятый блоков 7-11 коррекции, так и для вторых входов первого и второго блоков 25 и 26 вычитания. Следовательно, коррекции выходных сигналов блока 18 выработки скоростей объекта и блока 19 выработки координат объекта соответственно в первом блоке 25 вычитания и втором блоке 26 вычитания не происходит. Сигналы измеренных ускорений в связанной системе координат 



На выходе блока 12 определения кажущихся ускорений формируется вектор кажущихся ускорений в инерциальной системе координат (ИСК) 
На выходе блока 15 оценки гравитационного ускорения формируются сигналы, соответствующие проекциям gx, gy и gz вектора гравитационного ускорения 

где 
С выходов блоков 12 определения кажущихся ускорений и 15 оценки гравитационного ускорения сигналы поступают соответственно на первый и второй входы сумматора 16, на выходе которого формируются составляющие полного ускорения объекта

С выхода сумматора 16 сигналы 

где Δt - шаг дискретизации, n=0, 1, 2,… - дискретное время.
С выхода блока 17 выработки приращений сигналы 


С выхода блока 18 выработки скоростей объекта сигналы 




Неавтономная радионавигационная система 21 служит для определения координат объекта 

В блоке 24 оценки инструментальных погрешностей производится оценка погрешностей акселерометров и гироскопов следующим образом.
Практически все возмущающие факторы, приводящие к медленно меняющимся ошибкам (ММО) первичных измерителей, сводятся к смещению нулей 





Величины 

При этом считаются известными среднеквадратические отклонения σi (i=1…12) данных ошибок.
Медленно меняющиеся ошибки измерителей ИНС (акселерометров и измерителей угловых положений) на достаточно больших интервалах времени, составляющих от единиц часов до нескольких суток, представляются стационарными случайными процессами с нулевыми математическими ожиданиями [5]. Эти процессы считаются некоррелированными друг с другом, а спектральная плотность каждого i-го процесса ξмi имеет вид [5]:

где αi=1/Тki - величина, обратная интервалу корреляции Tki; ω - круговая частота.
После выведения объекта в заданную область и начала совместной работы НРНС с ИНС объект осуществляет полет в области очень малой плотности атмосферы. Ввиду этого [10, Пятков В.В. Исследование наблюдаемости медленно меняющихся ошибок измерителей навигационной системы // Изв. вузов. Приборостроение. 1998. Т.41, №5. С.56-60] величины 


Для описания работы блока оценки инструментальных погрешностей следует записать уравнение (3) в приращениях и его линеаризовать. В итоге получится дифференциальное уравнение ошибок инерциальной навигации в векторно-матричной форме [10]:

где 



В качестве НРНС могут использоваться спутниковые радионавигационные системы или радиолокационные системы, основанные на запросно-ответных методах, позволяющие измерить угловые координаты и расстояния от наземных РЛС до подвижного объекта и рассчитать его координаты в ИСК, а по приращению координат - составляющие скорости подвижного объекта [11, Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Советское радио, 1974 г., 432 с.]. Медленно меняющиеся ошибки измерителей НРНС могут быть определены при их калибровке и в дальнейшем учтены при обработке измерений. Поэтому измерения НРНС представляются в виде [11]:

где 




Введя непосредственно наблюдаемый вектор разности

по результатам многократных измерений обеих измерительных систем получают оценки 


Случайные ошибки измерения параметров вектора 

где под системой понимается уравнение ошибок инерциальной навигации. Применяя метод пространства состояний [11, 12], можно записать дифференциальное уравнение, соответствующее вектору (11) в виде:

где 

где I - единичная матрица; 0′′ - 2×2 нулевая матрица; 0′ - 2×3 нулевые матрицы; нулями обозначены 3×3 нулевые матрицы; Λ1, Λ2 - матрицы, получаемые из выражений (1), (3) и имеющие вид:

Здесь элементы αij получены из матрицы частных производных

Значения элементов частных производных, входящие в выражение (15), определяются в блоке 14 вычисления производных матрицы угловой ориентации.
Учитывая, что в исследуемом объекте непосредственно измеряются (наблюдаются) только компоненты вектора 


По измерениям части 





где
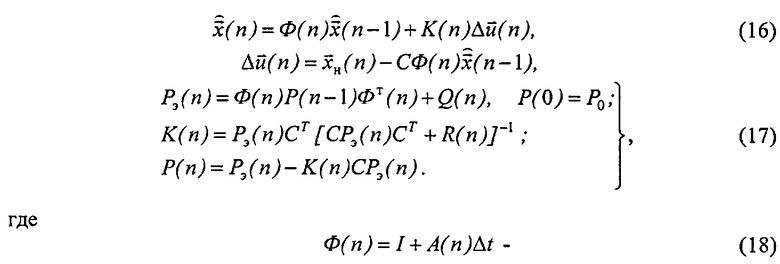
матрица экстраполяции (здесь I - единичная матрица); K(n) - весовая матрица; 
По достижении заданной точности оценок параметров вектора (11) и, соответственно, вектора (7) на вторые входы блоков коррекции 7-11 подаются сигналы, соответствующие оценкам инструментальных погрешностей. Критерием достижения заданной точности оценок инструментальных погрешностей служит нижняя граница Крамера-Рао, определяемая путем обращения информационной матрицы Фишера F(n), рекуррентное выражение для определения которой имеет вид [13, Ковальчук И.А., Кошеля И.А. Алгоритм вычисления нижней границы ковариаций ошибок оценивания при нелинейной фильтрации // Радиоэлектроника. - 1985. - Т.28. №7. - С.82-841:

где матрицы С и Ф(n) определяются выражениями (13) и (18).
Обратная матрица:

определяет, таким образом, нижнюю границу ковариаций ошибок оценивания.
Для удобства определения условия выбора момента начала коррекции измерителей представим выражение (16), а также матрицы P(n), Pэ(n) и Pг(n) в блочном виде. При учете непосредственно наблюдаемых (индекс "н") и неизмеряемых (а только оцениваемых) медленно меняющихся (индекс "м") элементов вектора состояния 
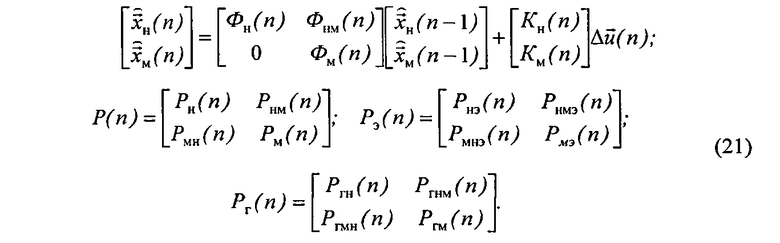
Откуда следует:

Вычисляемые рекуррентно элементы матрицы Км(n) уменьшаются в процессе работы оценивающего фильтра [11, 12], поэтому второе слагаемое в правой части первого выражения (22) также будет уменьшаться в течение времени работы фильтра. Анализ выражения (22) показывает, что ковариационная матрица

Таким образом, с увеличением текущего времени элементы матриц Kм(n)Pнмэ(n) также будут убывать, а в установившемся режиме работы Pм(n)≈Pмэ(n). В то же время значения элементов матрицы Pм(n) в переходном режиме работы фильтра зависят от заданной в начальный момент матрицы Pм(0), а матрица Pгм(n), определяемая по выражениям (20) и (21) и характеризующая нижнюю границу ковариаций матрицы Pм(n), от Pм(0) не зависит. Поэтому о точности оценивания медленно меняющихся ошибок измерителей ИНС можно судить по отношению следов ковариационных матриц:

где Sp - обозначение следа матрицы.
В этом случае при выборе достаточно малой величины δзад критерием принятия решения на коррекцию показаний первичных измерителей ИНС является условие:

Таким образом, до выполнения неравенства (25) в первом блоке 25 вычитания и втором блоке 26 вычитания по результатам совместной обработки координатной информации от блоков 18 и 20 выработки скоростей объекта и выработки координат объекта, а также неавтономной радионавигационной системы 24 производится коррекция показаний соответственно скоростей и координат ИНС.
При выполнении неравенства (25) показания первичных измерителей ИНС корректируются в соответствии с оценкой 
Блоки 14 вычисления производных матрицы угловой ориентации и 24 оценки инструментальных погрешностей могут быть реализованы на базе функционально ориентированных процессоров [13, Лукин Н.А. Функционально-ориентированные процессоры с однородной архитектурой для реализации алгоритмов бортовых систем управления. Труды пятой международной конференции «Параллельные вычисления и задачи управления» РАСО′2010. Москва, 26-28 октября 2010. - С.1177-1184. (http://paco2010.ipu.ru/pdf/C107.pdf)], [14, Водяхо А.И. Функционально ориентированные процессоры. Машиностроение. Ленингр. отд-ние, 1988. - 224 с.].
Первый блок 7 коррекции (фиг.2) включает в свой состав первый регистр 7.1, устройство 7.2 вычитания, блок 7.3 деления, второй 7.4 регистр, сумматор 7.5 и третий 7.6 регистр. Устройство работает следующим образом. В первом 7.1 регистре хранится код сигнала оценки смещения нуля 

На выходе устройства 7.2 вычитания формируется сигнал 
 и сигналом оценки смещения нуля
и сигналом оценки смещения нуля 

 , который и поступает на выход устройства. Следовательно, компенсируются такие инструментальные погрешности, как смещение нуля
, который и поступает на выход устройства. Следовательно, компенсируются такие инструментальные погрешности, как смещение нуля 

Второй блок 8 коррекции (фиг.3) включает в свой состав первый регистр 8.1 и устройство 8.2 вычитания. На первый вход второго блока 8 коррекции, являющийся вторым входом устройства 8.2 вычитания, поступает сигнал измеренного поперечного ускорения объекта в связанной системе координат в вертикальной плоскости полета. На второй вход второго блока 8 коррекции, а соответственно, и на первый 8.1 регистр, с четвертого выхода блока 24 оценки инструментальных погрешностей поступает код сигнала оценки смещения нуля 
 .
.
Третий блок 9 коррекции, предназначенный для коррекции измеренного ускорения 
Четвертый блок коррекции 10 (фиг.4) включает последовательно соединенные первый регистр 10.1, первое устройство 10.2 вычитания и второе устройство 10.3 вычитания, последовательно соединенные второй регистр 10.4 и блок 10.5 умножения. На первый вход четвертого блока коррекции 10 поступает сигнал измеренного угла рыскания ψизм, а на его второй вход по шине с шестого выхода блока 24 оценки инструментальных погрешностей поступают сигналы оценки смещения нуля гироскопа Δψ0 - на первый регистр 10.1, оценки скорости ухода гироскопа ωψ - на второй регистр 10.4 и код текущего времени t с начала движения объекта - на второй вход блока 10.5 умножения. Таким образом, на выходе первого устройства вычитания формируется сигнал разности 

Пятый блок коррекции 11, предназначенный для коррекции сигналов измерения угла тангажа ϑ объекта, имеет состав и принципы работы аналогично четвертому блоку коррекции 10.
Для проверки работоспособности устройства было проведено моделирование его работы на ЭВМ. В качестве подвижного объекта был выбран ЛА, выводимый за время tB в заданную точку инерциального пространства.
Координаты точки выведения (xB, yB, zB) ЛА в ИСК для разных значений времени полета tB и углов курса φ задавались в соответствии с табл.1. При этом наведение ЛА осуществлялось на основе расчета и компенсации значения прогнозированного пролета [15, Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических аппаратов. М.: Дрофа, 2004, с.345], [16, Авиация: Энциклопедия. - М.: Большая Российская Энциклопедия. Главный редактор Г.П. Свищев, 1994, с.364].
Значения инструментальных погрешностей измерителей ИНС задавалась в соответствии с таблицей 2.
Совместная работа ИНС и НРНС начиналась с 20 секунды полета ЛА. Для работы фильтра Калмана задавались следующие исходные данные:

Гауссовский вектор ошибок измерения 
На фиг.5 для примера приведены графики изменения ошибок оценивания смещения нуля акселерометра 
На фиг.6 приведен график изменения отношения следов ковариационных матриц δ, %, определяемый в соответствии с выражением (24). Время на фиг.5 и 6 показано с момента начала совместной работы ИНС и НРНС. Результаты моделирования показали, что установившийся режим работы фильтра Калмана начинается при δ(n)≤3%, что по времени соответствует примерно 65…70 с и более. Исходя из этого и следует задавать пороговые значения δзад.
На фиг.7 и 8 приведены соответственно графики изменения модулей ошибок определения скорости 


Результаты моделирования показали, что коррекция показаний измерителей ИНС ЛА в соответствии с получаемыми оценками их инструментальных погрешностей (значения ошибок перед косой чертой в табл.3) позволяет уменьшить ошибки ИНС в сравнении с корректируемой ИНС ЛА, в которой данные погрешности не оцениваются (значения ошибок после косой черты в табл.3). При заданных временах полета ЛА tв=300, 400 и 500 с в зависимости от заданного порога δзад ошибки инерциальной навигации при реализации предлагаемой системы в сравнении с ИНС, у которой не производится коррекция показаний первичных измерителей, уменьшаются соответственно в среднем примерно в 2…5, 3…8 и 4…10 раз.
Результаты моделирования подтвердили достижение технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| КОРРЕКТИРУЕМАЯ СИСТЕМА ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И СТАБИЛИЗАЦИИ | 2006 |
|
RU2319930C2 |
| СПОСОБ КОРРЕКЦИИ КОМПЛЕКСНОЙ ИНС ПО АНОМАЛИИ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ | 1985 |
|
SU1840368A1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК ОРИЕНТАЦИИ ИЗМЕРИТЕЛЬНЫХ ОСЕЙ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2018 |
|
RU2683144C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |

Изобретение относится к области приборостроения и может быть использовано в бортовых телевизионных или радиотехнических системах летательных аппаратов. Технический результат - повышение точности автономной работы инерциальной навигационной системы при прерывании радиосвязи с внешней неавтономной радионавигационной системой. Для этого система содержит три акселерометра с ортогональными осями чувствительности, блок определения матрицы угловой ориентации объекта, блок вычисления производных матрицы угловой ориентации, соединенные последовательно блок выработки приращений скоростей, блок выработки скоростей объекта, блок выработки приращений перемещений и блок выработки координат объекта, жестко установленные по ортогональным осям чувствительности подвижного объекта с первого по третий гироскопы, блок оценки гравитационного ускорения, неавтономную радионавигационную систему, соединенную посредством радиолинии с блоком бортовой радиоаппаратуры объекта, блок оценки инструментальных погрешностей, с первого по пятый блоки коррекции, сумматор, блок определения кажущихся ускорений, первый и второй блоки вычитания. 3 з.п. ф-лы, 8 ил., 3 табл.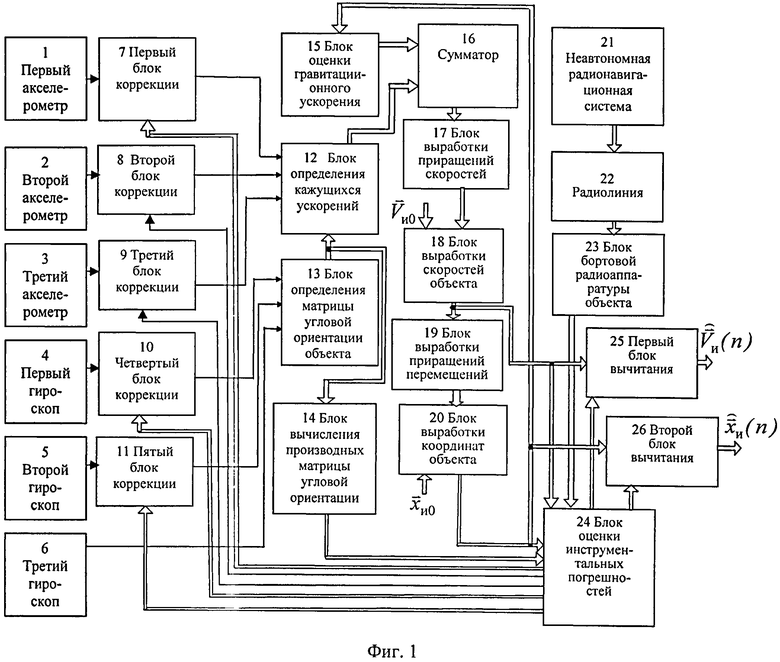
1. Инерциально-радионавигационная система, содержащая жестко установленные на подвижном объекте три акселерометра с ортогональными осями чувствительности, блок определения матрицы угловой ориентации объекта, блок вычисления производных матрицы угловой ориентации, соединенные последовательно блок выработки приращений скоростей, блок выработки скоростей объекта, блок выработки приращений перемещений и блок выработки координат объекта, отличающаяся тем, что в нее дополнительно введены жестко установленные по ортогональным осям чувствительности подвижного объекта с первого по третий гироскопы, блок оценки гравитационного ускорения, неавтономная радионавигационная система, соединенная посредством радиолинии с блоком бортовой радиоаппаратуры объекта, блок оценки инструментальных погрешностей, с первого по пятый блоки коррекции, сумматор, блок определения кажущихся ускорений, первый и второй блоки вычитания, при этом первые входы с первого по пятый блоков коррекции соединены с выходами с первого по третий акселерометров, первого и второго гироскопов соответственно, выходы первого, второго и третьего блоков коррекции соединены соответственно с первым, вторым и третьим входами блока определения кажущихся ускорений, соединенного четвертым входом с входом блока вычисления производных матрицы угловой ориентации и выходом блока определения матрицы угловой ориентации объекта, первый, второй и третий входы которого соединены с выходами четвертого и пятого блоков коррекции и третьего гироскопа соответственно, выход блока определения кажущихся ускорений подключен к первому входу сумматора, соединенного выходом с входом блока выработки приращений скоростей, а вторым входом - с блоком оценки гравитационного ускорения, вход которого соединен с выходом блока выработки координат объекта, на второй вход которого подаются сигналы начальных координат объекта, на второй вход блока выработки скоростей объекта подаются сигналы начальных скоростей объекта, выходы блоков выработки скоростей объекта, выработки координат объекта, блока бортовой радиоаппаратуры объекта и блока вычисления производных матрицы угловой ориентации соединены соответственно с первого по четвертый входами блока оценки инструментальных погрешностей, с первого по седьмой выходы которого соединены соответственно с вторыми входами первого и второго блоков вычитания и вторыми входами с первого по пятый блоков коррекции, выходы блоков выработки скоростей объекта и выработки координат объекта соединены соответственно с первыми входами первого и второго блоков вычитания, на выходах которых формируются сигналы оценок проекций скорости объекта и координат объекта соответственно.
2. Инерциально-радионавигационная система по п.1, отличающаяся тем, что первый блок коррекции включает последовательно соединенные первый регистр, устройство вычитания и блок деления, последовательно соединенные второй регистр и сумматор, третий регистр, выход которого подключен к второму входу сумматора, выход которого соединен с вторым входом блока деления, выход которого является выходом первого блока коррекции, первым входом которого является второй вход устройства вычитания, второй вход первого блока коррекции представляет из себя шину, по которой поступают два сигнала - оценки смещения нуля акселерометра - на вход первого регистра и оценки нелинейности статической характеристики акселерометра - на вход второго регистра.
3. Инерциально-радионавигационная система по п.1, отличающаяся тем, что второй блок коррекции состоит из соединенных последовательно первого регистра и устройства вычитания, второй вход которого является первым входом второго блока коррекции, второй вход которого является входом первого регистра, а выход устройства вычитания является выходом второго блока коррекции.
4. Инерциально-радионавигационная система по п.1, отличающаяся тем, что четвертый блок коррекции включает последовательно соединенные первый регистр, первое устройство вычитания и второе устройство вычитания, последовательно соединенные второй регистр и блок умножения, выход которого подключен к второму входу второго устройства вычитания, выход которого является выходом четвертого блока коррекции, первым входом которого является второй вход первого устройства вычитания, второй вход четвертого блока коррекции представляет из себя шину, по которой поступают три сигнала - оценки смещения нуля гироскопа - на вход первого регистра, оценки скорости ухода гироскопа - на вход второго регистра и значения текущего времени - на вход блока умножения.
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1986 |
|
SU1840258A1 |
| СПОСОБ ИНТЕГРАЦИИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И САМОИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2386108C1 |
| АНДРЕЕВ В.Д | |||
| Теория инерциальной навигации | |||
| Корректируемые системы | |||
| - М.: Наука, 1967 | |||
| ПРИБОР ДЛЯ НЕФТЯНОГО ОТОПЛЕНИЯ ПЕЧЕЙ | 1923 |
|
SU648A1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2233431C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |

