Изобретение относится к автоматическому управлейию, может быть использовано для управления параллельно работающими аппаратами в химической, нефтехимической и других отраслях промышленности. По основному авт. св. № 981965 известно устройство для управления технологическим процессом, включающее датчики Нагрузки и датчики выходных параметров управляемого процесса, блоки коррекции, сумматор, функциональный преобразователь, задатчик суммарной нагрузки, блоки умножения, блоки ограничения сигнала и регуляторы. Известное устройство распределяет нагрузки на параллельно работающие аппараты пропорционально их мощности с учетом выходного параметра.В случае, если четное значение нагрузки на какой-либо аппарат превышает его мощность, блок ограничения сигнала снижает задание соответствующему регулятору До величины мощности данного аппарата I. Недостатком известного устройства является снижение точности управления в случае срабатывания одного или нескольких блоков ограничения сигнала. В этом случае фактическое задание для соответствующих регуляторов нагрузки становится меньще расчетной величины, следовательно, суммарная нагрузка на все аппараты становится меньще величины, задаваемой задатчиком суммарной нагрузки, что является снижением точности управления. При этом йа некоторых аппаратах может сохраняться неиспользова 1Ный резерв мощности. Целью изобретения является повыщение точности. Указанная цель достигается тем, что в устройство для управления технологичеспроцессом введены дополнительный сумматор и по числу технологических аппаратов блоки сравнения, один вход каждого из которых подключен к выходу соответствующего блока умножения, другой вход - к выходу соответствующего блока ограничения сигнала, а выход - к первым входам дополнительного сумматора, второй вход которого связан с выходом задатчика суммарной нагрузки, а выход- с дополнительным входом каждого блока умножения. На чертеже изображена блок-схема предлагаемого устройства. Устройство содержит датчики 1 нагрузки, датчики 2 выходных параметров управляе-. мого процесса, блоки 3 коррекции, сумматор 4, функциональнь|й преобразователь 5, аадатчик 6 суммарной нагрузки, блоки 7 умножения, блоки 8 ограничения сигнала, регуляторы 9, технологические аппараты 10, блоки 11 сравнения и сумматор 12. Устройство работает следующим образом. Сигналы датчиков 1 нагрузки и сигналы датчиков 2 выходных параметров поступают на входы соответствующих блоков 3 коррекции. Таким образом, каждый из блоков 3 коррекции имеет на входах сигналы, соответствующие величинам нагрузки и выходного параметра для соответствующего аппарата. Блокн коррекции формируют величины ,,(1): ,п где Mi - значение скорректированной мощности i-ro аппарата; Mj - мощность i-ro аппарата, конструктивная константа; Yj -удельный выход i-ro аппарата; Bi - величина вых одного параметра; Hj -нагрузка на i-й аппарат. Сумматор 4 суммирует значения скор-. ректированных мощностей иных МО гдеС -выходной сигнал сумматора 4; а функциональный преобразователь 5 формирует обратную величину (3) гдеФ - выходной сигнал функционального преобразователя 5. На входы каждого из блоков 7 умножейия поступают выходные сигналы задатчика 6 через сумматор 12, функционального преобразователя 5 и соответствующего блока 3 коррекции. Блок 7 умножения формирует величину их произведения, являющуюся расчетной величиной нагрузки на соответствующий аппарат 10 р, р.ф.М,-,(4) где Pf - расчетная нагрузка на i-й аппарат; Р-величина выходного сигнала задатчика 6 суммарной нагрузки. С учетом (1), (2), (3) получим из (4) .(5) Выходные сигналы блоков 7 умножения . через соответствующие блоки 8 ограничения поступают в качестве задания на регуляторы 9. При этом, если выходной сигнал блрк;з 7 умйожения меныие значения мощности аппарата или равен ему ,(6): to блок 8 ограничения не меняет велгшины сигнала. В этом случае разность сигналов до и после блока ограничения, определяемая блоком И сравнения, равна нулю. При соблюдении условия (6) для всех значений i, т. е. на всех блоках 8 и 11, на входах сумматора 12, кроме выходного сигнала задатчика 6 суммарной нагрузки, равного величине Р, присутствуют выходные сигналы блоков 11 сравнения, равные Нулю. Следовательно, выход из второго сумматора 12 Р + 0 + ... + 0 РЕсли условие (6) выполняется, выходной сигнал блока 8 ограничения поддерживается па уровне значения мощности аппарата. . Р .. i Mi.npM где PI - величина задания i-му регулятору 9 Гарантией получения заданной нагрузки Р на всем участке является тождество п. D М-V gPi Mi Однако вслучае срабатывания одного из блоков 8 ограничения не выполняется равенстве так Как величин р. Р{. слеиювательнори этом блоки 11 сравнения, йа первые входы которых поступает сигнал pJ, а на вторые р, вырабатывают сигйа разности .(И) где 0{-выходной сигнал i-ro блок сравнения. Величина разности является тем дефицитом суммарной нагрузки, который необходимо скомпенсировать. Сигнал с выхода блока 1Г сравнения поступает на вход второго сумматора 12. При этом выходяой сигнал сумматора 12 принимает значение Сг : .:-- ,. - - ;, . .; ;;- ;,,, Поскольку выходной сигнал сумматора 12 является по существу заданием суммарной нагрузки, то, следовательно, дефицит di перераспределяется на все аппараты. Если в результате пере{}аспределения расчетная нагрузка на какой-либо другой аппарат превышает величину его мощности, перераспределение повторяется по сигналу соответствующего блока сравнения, и так до тех пор, пока имеется Нагрузка распределяется с учетом фактической эффективност1с работы каждого аппарата. При условии М{ Р на все аппараты задания равны величинам их мощностей. Изобретение может быть реализовано на стандартных элементах пневмоавтоматики, электроники или вычислительной техники. Применение предлагаемого устройства позволит по сравнению с известным избежать н еоправданного снижения суммарной нагрузки на участки .параллельно работающих аппаратов при сохранении всех преимуществ извех тного устройства. В результате повышается выработка продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления технологическим процессом | 1981 |
|
SU981965A1 |
| Программно-задающее устройство | 1978 |
|
SU811213A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕМПЕРАТУРНЫМ РЕЖИМОМ БЛОКА РЕКТИФИКАЦИОННЫХ КОЛОНН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208831C2 |
| Устройство для контроля работы оборудования | 1986 |
|
SU1387027A1 |
| Устройство для управления технологическим процессом | 1981 |
|
SU945852A1 |
| Система автоматической стабилизации работы аппарата для помола многокомпонентного волокнистого полуфабриката | 1988 |
|
SU1544495A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| Устройство для автоматического распределения нагрузки между паралелльно включенными технологическими аппаратами | 1985 |
|
SU1267382A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ по авт. св. № 981965, отличающееся тем, что, с целью повышения точности, оно содержит дополнительный сумматор и по числу технологических аппаратов блоки сравнения, один вход каждого из которых подключен к выходу соответствующего блока умножения, другой вход - к выходу соответствующего блока ограничения сигнала, а выход - к первым входам дополнительного сумматора, второй вход которого связан с вь1ходом задатчика суммарной нагрузки, а выход - с дополнительным входом каждого блока умножения. (Л О) N9 О О) СХ)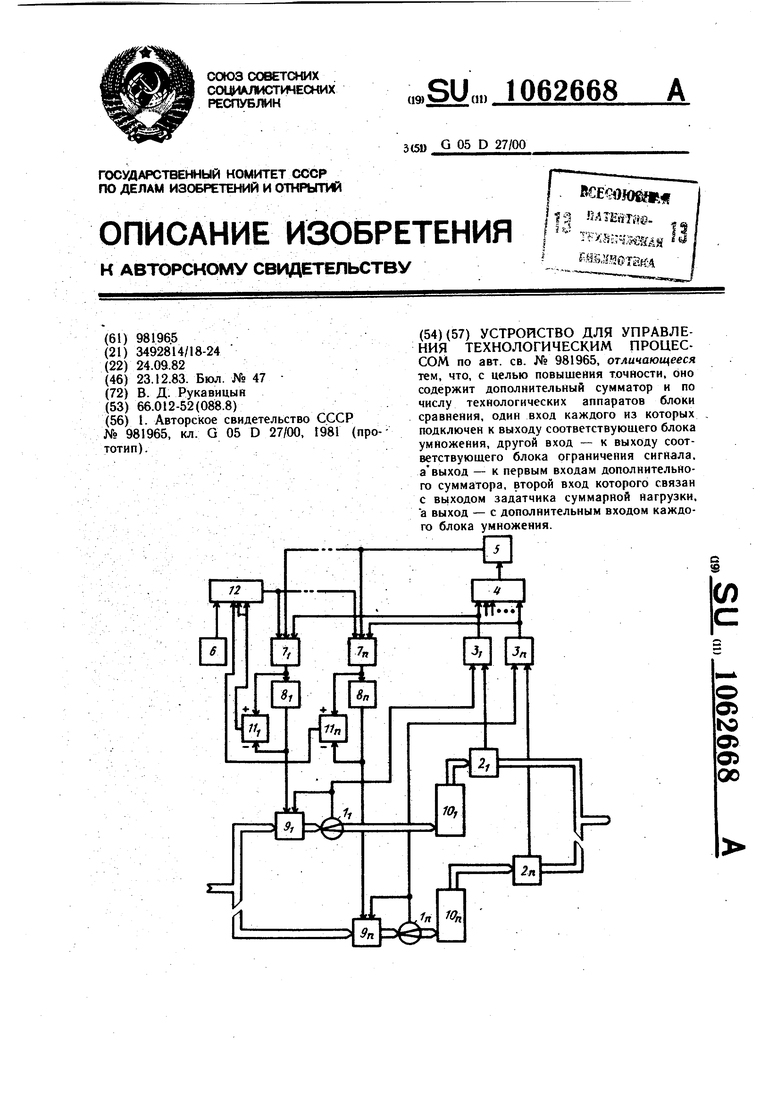
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
