Изобретение относится к электроприводу, в частности к электроприводу с асинхронным двигателем с фазным ротором, который питается от регулируемого преобразователя частоты; при этом статор двигателя питается от промышленной сети. Рассматриваемый электропривод предназначен для производственных механизмов с ограниченным диапазоном регулирования скорости, примерно 1:3, при высоком качестве регулироваиия скорости. Известен тиристорный электропривод и асинхронным двигателем с фазным ротором (I),, который обеспечивает высокое качество регулирования скорости. Недостатками известного электропривода являются ограниченная мощность и малая надежность, определяемые наличием коллектора. Для решеиия названной задачи применяют электроприводы с асинхронным двигателем с фазным ротором, питаемым от преобразователя частоты (}, 2). Эти электроприводы не имеют недостатков, связанных с наличием коллектора, однако они обладают невысокими дииамическими свойствами вследствие jiencwtHoro учета динамических свойств асинхронного двигателя.2 Известен электропривод с асинхроииым двигателем с фазным ротором (Л.31 содержащий регулируемые источники питания ротора (например тиристорные), датчик скорости, динамические звенья гибкой связи, датчик углового положения ротора относительно осей, жестко связанных со статором, датчик углового положения вращающейся системы координат а, В относительно осей, жестко связанных с ротором, блок преобразования переменных от фазовых токов статора и ротора к .составляющим потокосцеплвний статора и ротора по осям а, f, блок преобразования переменных от управляющих напряжений по осям а, р к фазовым управляющим напряжениям источииков питания фаз ротора. ПоложИтельиые свойства прототипа обусловлены тем, .что в нем, во-первых, использована двухканальная система подчиненного регулирования момента и реактивной мощности асинхронного двигателе, построеииая в- координатах а, р, жестко связаниых с вектором напряжения питающей сети, т. е. вращающихся с фиксировйнной скоростью WR, равной синхронной скорости (oj,; .во-вторых, в указанной системе компенсируются основные электромагнитные и электромеханические ииерционносги
двигателя, °а также ЭДС скольжения, т. е. учтены ее основные динамические свойетва. При этом момент и реактивная мощность асинхронного двигателя регулируются за счет поддержания на уровне заданий активного и реактивного токов двигателя путем воздействия на источники питания фаз ротора. Известный электропривод по качеству регулирования скорости практически не уступает тиристорному электроприводу постоянного тока. Кроме того, обеспечивается вь1сокое качество регулирования реактивной мощности.
Недостатком известного электропривода является понижение качества регулирования скорости и реактивной мощности при колебаниях напряжения питающей статор сети,, т. е. в условиях, когда статор асинхронного двисателя подсоединен к сети, мощность которой сравнима с мощностью двигателя.
Цель изобретения - улучшение регулирования скорости и повышение реактивной мощмости у электропривода с асинхронным двигателем с фазным ротором при питании статора от сети с ограниченной мощностью.
Указанная цель достигается тем, что в электропривод введен задатчик потокосцепления статора по оси а, выход которого подключен к первому входу формирователя гармониче кмх функци, второй и третий входы которого соединены соответственно с двумя выходами формирователя потокосцеплений статора, которые подключены также к первому и второму входам блока коррекции перекрестных связей, прич«м один из выходов формирователя потокрсц«пленнй статора соединен со входом формирователя сигнала задания вотркосцепления ротора по оси р. Четвертый вход формирователя гармонических функций соединен с одним из выходов формирователя потокосцепления ротора, а выход формирователя гармонических функций для сигнала угловой скорости системы координат U н соединен со входом для сигнала скорости блока коррекции перекрестных связей осей а и /3.
Кроме того, в формирователь гармонических функций, содержащий датчик углового положения ротора и генератор гармоническ)1х функций, введен формирователь модуля напряжения сети и формнрователь частоты сети, выход которого через дополнительно аведенные первый сумматс, интегратор, нелинейный элемента блок умножения подкл1очен к первоиу входу второго сумматора, выход которого через вновь блок деления соединен со входом первого сумматора и входом упоМинутого генератора гармонических функций; второй вход второго сумматора соединен с Ш; ходом дополнительно введенного регулятора, а выход формирователя модуля напряжения сети подключен к упомянутому блоку умножения.
Указанная цель достигается также тем, что в формирователь сигнала задания потокосцепления ротора по оси Д, содержащий сумматор, введены блоки умноже)|ия и деления, вход делителя последнего соединен со входами блока умножения, а вход делимого подключен к выходу сумматора, вход которого соединен с выходом блока умножения.
В блек коррекции перекрестных связей осей ч и Д, содержащий два блока умножения и два корректирующих звена, введены два сумматора, один из котЬрых включен между одним блоком умножения и одним корректирующим звеном, а другой включен между другнц блоком умножения и другим корректирующим звеном.
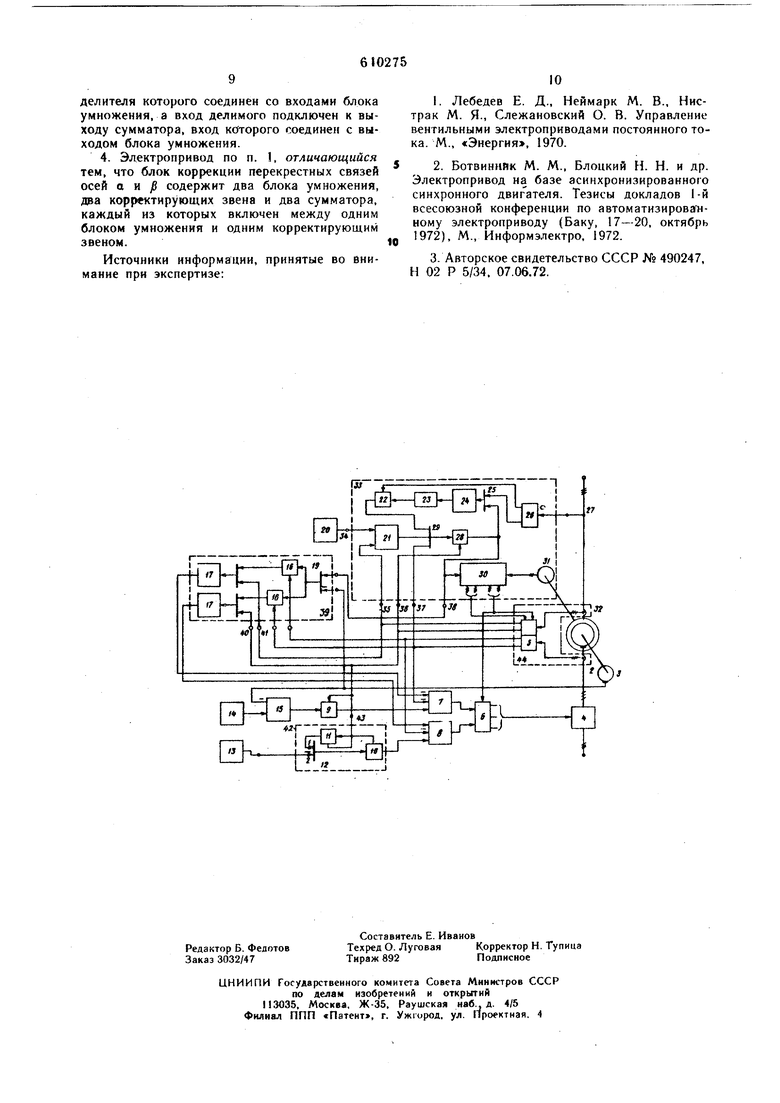
На чертеже представлена схема электропривода.
Электропривод содержит-асинхронный двигатель I с фазным ротором, датчики тока 2 фаз обмотки ротора, датчик скорости 3, регулируемые источники 4 питания фаз обмоткн ротора, блоки 5 обратного преобразования переменных от осей статора и ротора к осям ft и ji, формнрователь 6 напряжения управления для регулируемых источников питания фаз ротора (блок прямого преобразования повременных от осей аи к осям ротора), регулятор 7 потокосцепления ротора t. по оси а, регулятор 8 потокосцепления ротора . йо оси j3, делительный элемент 9, делительный элемент 10, множительный элеме} И, суммирующий %л емент 12, задатчик 13 реактивнЫ мощности статора, зада1гчнк сксфости 14, регулятор скорости 15, множительные элемен-п 16, корректнрующне звенья J7, суммнрующяе элементы 18, 19, задатчик 20 потокосцеплення статора %(jj,no оси о, регулятор 21 потокосцепления статора .$ по оси х, множительный элемент 22, нелинейный элемент 23, интегратор 24, суммирующий элемент 25, формнрователь 26 модуля напряжения сети и формнрователь частоты сети, датчики 27 фазных напряжений статора, делительный элемент 28, сумматор 29, генератор гармонических функций 30, датчик 3i углового положения ротора относительно осей, жестко связанных со статором, датчики 32 тока фаз обмотки статора (некоторые из указанных выше элементов могут быть объединены в функциональные блоки, показанные на чертеже штриховой линией), формирователь гармонических функций 33, содержащий элементы 21 - 26 и 28-31, имеющий кроме основных входоь для углового положения ротора и напряжения U-, четыре дополнительных входа (34-37), а также кроме основных выходов для сигналов гармонических функций дополнительный выход 38 для сигнала угловой скорости системы координат а н ; блок 39 коррекции перекрестных связей осей ft и fl, имеющий кроме четырех основных входов два дополнительных 40 о 41; формирователь 42 сигнала задания потокосцепления ротора по. оси /3, имеющий кроме основного входа один дополнительный 43, формирователь 44 потокосцепленнй статора и ротора по Осям и и Д, имеющий четыре выхода.
Указанные выше элементы и функциональные блоки связаны и взаимодействуют, следующим образом.
Обмотка статора асинхронного двигателя I питается от источника симметричного трехфазного синусоидального напряжения, величина V, и частота ш, которого в общем случае непостоянны. Каждая фаза ротора питается от одного из реверсивных регулируемых источников питаиия 4, Предполагается, что между вход иым управляющим напряжением и выходным напряжением источников питания фаз ротора имеется линейная зависимость. На валу двигателя J имеются датчик скорости 3 и датчик углового положеиня ротора 31. В цепях статора и ротора нмеются датчики фазовых токов 32 н 2 и датчики 27 фазовых напряжений ЛНгающой сети.. Сигналы, пропорциональные токам фаз ротора и статора, от датчиков 2 и 32, а также сигналы, пропорииоиальиые круговым фуикциям sin г,, cosJV..и функцням sin (г-г«), cos (г-jv). от генератора гармонических функций 30 подаются на вхолда &ижа преобразования переменных 5. На выходе формирователя 44 потокосцеплеиий статора и ротора получаются сигналы, пролорциоиальные потокосцеплениям статора К,а, Ч/н и ротора г, . С формирователя 44 сигналы, пропорциональные ..f .{ сигналов отрицательных с ратяых связей подаются на регулятор 7 явтокосцепления на регулятор 8 петсжесцеп ления Кл)/. регулятор 21 потокосцепления |На регулятор 7 кроме сигнала отрицательной обратной связи подается сигнал зада«ня, пропорциональный делительного элемента 9, для которого делителем является сигнал, пропорциональный ц, с формирователя 44, а делимым - сигнал, пропорциональный заданию П1«у электромагнитного момента двигателя 1, подаваемый с регулятора скорости 15. На регулятор скорости поступает сигиал с датчика скорости 3, пропорцнональаый скорости ш двигателя и сигнал задания, йршк шюнальный заданной скорости «., с датчика скороетн 14. На регулятор 8 кроме сигнала отрицательмой обратной связи подается сигнал задания. вропорциональныб Удг, с формирователя задания 42 от делительного элемента 10, для которого делителем является оршад, nfXMiq}ционадьиый s, с формиркжатедя 44. Делимым для элемента 10 является сигнал с суммирующего зцлемеита 12, на котсфый шмггупавт ный VjA, с множительсигнал, пропорциональный H(Mt элемента И, и сигнал, пропорциональный заданию по реактивной мощности Qsg, с задатчика реактивной мощности статора 13. На входы элемента И действуют еягяялы, пропорциональные ffs. с фсфммроватеяя 44. На регуляторы 7 и 8, 1фоме рассмотренных зыше сигналов задания и отрицательных обратных связей по потокосцеплениям , подаются дополнительные снгмалы от корректирующих звеньев 17 блока за коррекции перекрестных связей осей а и ft. Эгн звенья имеют переааточные функции регуляторов 7, 8 и .ведены с целью компенсации внутренних перекрестных обратных связей асянхр жной машины. На входы заеИьев 17 через суммирующие элементы 18, 19 воздействуют сигиалы, пропорциональные «s и У , с фo JMиpoвaтеля 44, и сигналы с множительных элементов 16, на входы которых поступают сигналы, пропорциональные Vir и , с формирователя 44, а также с суммирующего элемента 19, на вход которого воздействуют сигналы с Датчика скорости 3 и с дОполнигельного выхода 38 формирователя гармонических функций 33 от делительного элемента 28, пропорциональные скорости двигателя ш и скорости вращения cHt координат , ш,. Под воздействием рассмотренных трех видов сигналов (сигналов задания с элементов 9 и 10, сигналов отрицательной обратной свяэй с формирователя 44, компенсирующих сигналов со звеньев 17) на выходе регуляторов 7 и 8 вырабатываются управляющие сигналы U, и Vfff, подаваемые на формирователь 6 на пряжений управления фаз ротора. Под воздействием этих сигналов и сигналов, пропорциональных 5ш(г-г) и cos (г-.), подаваёмых на формирователь 6 с формирователя 33, преобразуются переменные. В оезультате этого на выходе формирователя 6 вырабатываются сигналы управления Uioy, н Uerj, подаваемые на управляющие входы источников питания 4 фаз обмотки ротора двигателя 1. На регулятор 21 кроме сигиала обратной связи fi с формирователя 44, задатчика потокосцепления 20 поступает сигнал задания -Jij; принятый равным . Под воздействиел укаэаиных сигналов на выходе регулятора 21 вырабатывается сигнал задания на изменение составляющей по оси а напряжения питающей сета. Этот сигнал подается на элемент 2J, где выполняется алгебраическое сложение его с сигналом , пропорциональным , с формирователя 44, и с сигналом, пропорциональным U«s с множительного элемента 22, на входы которого с ф(фМ1|)ователя 26 и иелинейного элемента 23 подаются, соответственно, сигнал, пропорциональный U, и сигнал, пропорциональный cos Q. Последний вырабатывается нелинейным элементом 23 под воздействием сигнала пропорционального Q, с нитегратора 24, где интегря|1цгется сигиал с суминрук шего элемента 25. Этот а/ емеит выполняет алгебраическое сложение сигналов, пропорциональных 1ФУГОВОЙ частоте питающей сети « н круговой частоте вращения (« системы. координат а и /S, постув)вющих с элемента 28 н юрмнрователя 26, на который подаются сигналы с датчиков 27. пропорциональные фазовым напряжениям Ua4Un,AJ. питающей сети. В результате сложения рассмотренных выше сигналов (AUx , . ) иа выходе сумматора 29 вырабатывается сигнал, аосле деления на сигнал, пропорциональный. , подаваемый иа делительный элемеит 28 с формирователя 44. на выходе элемента 28 вырабатывается сигнал, пропорциональный скорости вращения системы Координат w. С делительного атемента 28 (дополнительиый выход 38 формирователя 33) сигиал, 14)0порциональный ,, подается на элементы 19 и 25, как это было рассмотрено выше, а также на генератсф гармонических функций 30,
на другой вход которого подаются сигналы с датчика 31 углового положения ротора, пропорциональные круговым функциям sin у и cos г. Под воздействием этих сигналов генератор 30 вырабатывает сигналы, пропорциональные гармоническим функциям sinfv и cosjT,, а также sin () и cos (г-Л), т. е. генератор выполняет математические операции, связанные с вычислением синуса и косинуса разности углов 1 и Т характеризующих положение ротора н положение системы координат о и )5 соотвегственно в системе осей, жестко связанных со статорви. С генератора 30 (основные выходы формирователя 33) сигналы, пропорциональные указанным функциям, подаются на формирователь 44 и 6.
Совокупность оянсанных элементов, регуляторов, преобразователей, датчиков, формирователей, соединенных и взаимодействующих рассмотренным выше образом, вредставляет собой- электропривод с асинхронным двигателем с фазным ротором и с управляемой скоростью вращения системы координат.
В стационарных режимах работы этот электропривод обладает следующими свойствами.
За счет работы четырех пропорционально интегральных регуляторов сйеспечнвается поддержание на уровне заданий четырех величин: скорости вращения ю. составляющей потокосцепления статора ,составляющих потохосцеплений ротора г- В стационарном режиме работы привода формирователь гармоннческих функций задает скорость вращения системы координат а, ft, равную угловой частоте питающей сети; ври этом электромагнитный момент на валу асинхронного двигателя равен моменту сопротивлення нагрузки, а реактнвная мощность определяется сигналом задания. .
В отнощении диапазона регулирования скорости, перегрузочной способности, диапазона регулирования реактивной мощности и других статических характеристик рассмотренный привод полностью эквивалентен известному электроприводу (3).
Преимущество описанного электропривода - более высокое качество регулирования реактивной мощности асинхронного двигателя при колебаниях, например -снижениях напряжения питающей сети.
Отсюда следует, что рассмотренный электропривод целесообразно применять при значительных колебаниях реактивной мощности, а следовательно, колебаниях модуля напряжения питающей сети, например в узлах сети, содержащих дуговые сталеплавильные печи; колебания модуля напряжения могут достигать 5-7%. Именно в этих условиях целесообразно применение этого электропривода, обеспечивающего повыщенное качество регулирования реактивной мощности и способного компенсировать колебания модуля напряжения питающей сети.
Формула юобретения
1.Электропривод с асинхронным -двигателем с фазным ротором, содержащий датчик, задатчнк и регулятор скорости с делительяым злек ешгом на выходе, регуляторы потокосцеплений ротора по осям аи /3, формирователь напряжения управлення для регулируемых источников питания, фаз ротора, датчики фазных напряжений статора, формирователь гармонических функций, аргументом которых является угловое положение системы координат с осями а.и р по отношению к осям, жестко связаннь1м со статором, и по отиощенню к осям, жестко связанным с ротором, блок коррекции перекрестных связей осей « и j8, формирователь сигнала задания потокосцепления ротора по осн Д, задатчик реактивной мощности статора, формирователи потокосцепленнй статора н ротора по осям а в , подключенные к формирователю гармонических функций и к датчикам токов статора и ротора, отличающийся тем, «то, с целью улучщения регулирования скорости и говыщения реактивной мощности при колебаниях йапряження пнтающей сети, в схему введен задатчик потокосцепления статора по оси «, выход которого подключен к нервому входу формирователя гармонических функций, второй и третий входы которого соединены соответственно с двумя выходами формирователя потокосцеплений статора, которые подключены также к первому и второму входам блока коррекции перекрестных связей, причем ОДИН из выходов формирователя потокосцеплейий статора соединен со входом формирователя сигнала задания потокосцепления ротора по оси /, при этом четвертый вход формирователя гармонических функций соединен с одним нз выходов формирователя потокосцеплений ротора, а выход формирователя гармонических функций для сигнала угловой скорости системы координат а и /8 соединен со входом для сигнала скорости блока коррекция перекрестных связей осей а и Д.
2.Электропривод по п. 1, отличающийся тем, что, с целью улучщения регулировочных характеристик, формирователь гармонических функций содержит датчик углового положения ротора, генератор гармонических функций, фор. мчрователь модуля напряжения сети в формирователь частоты сетн, выход которого через дополнительно введенные первый сумматор, интегратор, нелинейпый элемент и блок умножения подключен к первому входу второго сумматора, выход которого через вновь введенный блок деления соединен со входом первого сумматора и входом упомянутого генератора гармонических функций, при этом второй вход второго сумматора соединен с выходом допол-. ннтельно введенного регулятора, а- выход форлшрователя модуля напряжения сети подключен к упомянутому блоку умножения.
3.Электропривод по п. I, отличающийся тем, что формирователь сигнала задания потокосцепления ротора по оси 3 содержит сумматор, блок умножения и блок деления, вход
делителя которого соединен со входами блока умножения, а вход делимого подключен к выходу сумматора, вход которого соединен с выходом блока умножения.
4. Электропривод по п. 1, отличающийся тем, что блок коррекции перекрестных связей осей а и ;8 содержит два блока умножения, два кор{ ктирующих звена и два сумматора, каждый из которых включен между одним блоком умножения и одним корректирующим звеном.
Источники информации, принятые во внимание при экспертизе:
10
1.Лебедев Е. Д., Неймарк М. В., Нистрак М. Я., Слежановский О. В. Управление вентильными электроприводами постоянного тока. М., «Энергия, 1970.
2.БОТВИННИК М. М., Блоцкий Н. Н. и др. Электропривод на базе асикхронизировакного синхронного двигателя. Тезисы докладов 1-й всесоюзной конференции по автоматизированному электроприводу (Баку, 17-20, октябрь 1972), М., Информэлектро, 1972.
3. Авторское свидетельство СССР ЛЬ 490247, Н 02 Р 5/34, 07.06.72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Электропривод переменного тока | 1979 |
|
SU828356A1 |
| Электропривод | 1986 |
|
SU1390762A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
п
