8, блоки вычисления (БВ) 9 и 18 ошибок, блок тактовой синхронизации 10, детекторы 11,12 и 13 качества, перемножители 14,15,16 и 17, блок формирования 19 сигнала запрета подстройки адаптивного корректора, элемент И-НЕ 20, элемент И 21, БВ 22 коэф. адаптивной фазовой автоподстройки частоты (ФАПЧ) опорного колебания, блок 23 адаптивной-,ФАПЧ опорного колебания, блок 24 стационарной.ФАПЧ опорного колебания и сумматор 25. Для предотвращения расстройки адаптивных систем при воздействии на передаваемый сиг1
Изобретение относится к электросвязи и может использоваться в технике передачи данных.
Цель изобретения - повышение помехоустойчивости от мультипликативных помех.
На чертеже изображена структурная электрическая схема предлагаемого устройства.
Устройство адаптивного приема дискретных сигналов с амплитудно-фазовой модуляцией содержит автоматический регулятор 1 уровня, полосовой фильтр 2, фазовращатель 3, аналого-цифровой преобразователь 4, адаптивный корректор 5, демодулятор 6, решающий блок 7, декодер 8, первый блок 9 вычисления ошибок, блок 10 тактовой синхронизации, первый 11, второй 12 и третий 13 детекторы качества, четвертый 14, третий 15, второй 16, первый 17 перемножители, второй блок 18 вычисления ошибок, блок 19 формирования сигнала запрета подстройки адаптивного корректора, элемент И-НЕ 20, элемент И 21, блок 22 вычисления коэффициента адаптивной фазовой автрподст- ройки частоты опорного колебания, блок 23 адаптивной фазовой автоподстройки частоты опорного колебания, блок 24 стационарной фазовой автоподстройки частоты опорного колебания, сумматор 25.
Устройство работает следующим образом.
нал мультипликатииных сюмех в устройстве предусмотрено прекращение пол стройки адаптивных систем в зависимости от величины остаточной среднеквад ратичной ошибки компенсации искажений, вносимых каналом связи. При наличии в канале связи качаний фазы несущего колебания с неизвестной девиацией и частотой наилучшую компенсацию фазовых флуктуации несущего колебания обеспечивает применение комбинированной системы синхронизации опорного колебания, что способствует повьшению помехоустойчивости устройства. 1 ил.
Принимаемый сигнал поступает на вход автоматического регулятора 1 уровня, который обеспечивает нормальное функционирование устройства адаптивного приема при изменении уровня входного сигнала на tie относительно номинального значения.
Затем принимаемый сигнал поступает на вход полосового фильтра 2, обеспечивающего подавление внеполосовых составляющих аддитивного шума. С выхода полосового фильтра 2 сигнал подается на входы фазовращателя 3 и аналого- , цифрового преобразователя 4, а также на управляющий вход автоматического регулятора 1 уровня. Введение в цепь подстройки автоматического регулятора 1 .уровня принимаемого сигнала, полосового фильтра 2 позволяет снизить влияние аддитивного- щума на коэффициент передачи автоматического регулятора 1 уровня. Фазовращатель 3, обладая равномерной амплитудно-частотной характеристикой, вносит фазовый сдвиг на 90 во всей полосе частот принимаемого сигнала и служит для формирования его квадратурной составляющей, которая подается на второй вход аналого-цифрового преобразователя 4.
С выходов аналого-цифрового преобразователя 4 отсчеты синфазной х и квадратурной х 5J составляющих принимаемого сигнала, взятые с частотой дискретизации, в два раза превьшающей тактовую частоту, поступают на входы
адаптивного корректора 5 и блока 10 тактовой синхронизации. Как отсчеты принимаемого сигнала, так и коэффициенты передачи регуляторов адаптивног корректора 5, а также сигналы на последующих стадиях обработки являются комплексными, т.е. имеют синфазную и квадратурную составляющие.
Адаптивный корректор 5 представляет собой нерекурсивный цифровой фильт настраиваемый по критерию минимума среднеквадратичной ошибки (СКО). Он реализован на линии задержки с отводми, расположенными через половину единичного интервала Т (, тактовая частота). Регуляторы выполнены на умножителях. Сигналы с выходов умножителей объединяются сумматорами. Алгоритм адаптивной коррекции описывается уравнением
Nf2 . , . ,X.,,., (1)
где Yf,Ijp+jl5j, - отсчет откорректированного сигнала на
-1
W.
N
п-м единичном интер вале;
коэффициент равный 1, если k четное, и равный О, если k нечетное;
число отводов линии задержки адаптивног корректора; отсчет сигнала на 1-м отводе линии з.а держки адаптивного корректора; значение коэффициента передачи 1-го регулятора.
Коэффициент передачи 1-го регулятора адаптивного корректора определяется в соответствии со стохастическим алгоритмом минимума СКО уравнением
)( ; Y , ()) L р -и f .{,
Xx xck+Jxs,,
где К - малое вещественное число,
определяющее шаг подстройки адаптивного корректора;
оценка информационного символа на п-м единичном интервале, а а и а g - эталонные значения его составляющих для синфазного и квадратурного подканалов; min - функция, равная ,- f jag,- , доставляющей ми нимальное значение выра жению в фигурных скобках Очевидно, что процедура оценки и н формационного символа состоит в вычи слении на каждом единичном интервале
рой соответствует минимальное значение выражения в скобках.
выражения в фигурных скобках уравне- 50 ния (4) для всех возможных значений
-. . „а S..+a, и выбора такой а;, кото-
ошибка подстройки адаптивно- .. Ci ы
го корректора и системы тактовой синхронизации., .
Оценка информационного символа
Выбор частоты дискретизации прини-55 с выхода решающего блока 7 маемого сигнала в соответствии с те- подается на входы декодера 8, осуще- оремой Котельникова предполагает ис- ствляющего преобразование информаци- пользование в устройстве приема адап- онных символов-в код, в котором ин- тивного корректора с двойным строби- формация поступает потребителю.
ется уравнением
рованием, отводы линии задержки которого расположены через интервал Т/2. Отсчеты откорректированного сигнала „ поступают на вход демодулятора 6, который осуществляет перенос принимаемого сигнала в полосу эквивалентного низкочастотного канала и компенсацию флуктуации фазы несущего колебания. Работа демодулятора 6 описывается уравнением
()Yn(cos4 -jsin4 n), (3) где +
JSsn отсчет демодулированного сигнала; Vn - оценка фазы несущего
колебания (фаза опорного колебания).
Демодулятор 6 состоит из умножителя и преобразователя оценки фазы несущего колебания, формируемой системой синхронизации опорного колебания, в отсчеты комплексного опорного колебания, используемого при когерентной
демодуляции принимаемого сигнала.
Демодулированный сигнал поступает . на входы решающего блока 7 и детекторов 11-13 качества, блоков 9, 18 вычисления ошибки.
Решающий блок 7 осуществляет по- элементную оценку информационных символов в соответствии с уравнением a min- t(S{:n-aei)+(,- )2J , (4)
1 /
-5
где + +jasn
0
5
оценка информационного символа на п-м единичном интервале, а а и а g - эталонные значения его составляющих для синфазного и квадратурного подканалов; min - функция, равная ,- + f jag,- , доставляющей минимальное значение выражению в фигурных скобках. Очевидно, что процедура оценки и н- формационного символа состоит в вычислении на каждом единичном интервале
рой соответствует минимальное значение выражения в скобках.
.. Ci ы
, .
5 , 13093196
Оценка информационного символа а и- е A3 ; Третий детектор 13 качества поступает также на входы детекторовдетекторов 11,12 качества характеризу- 11 - 13 качества, блоков 9 и 18 вы-ется тем,что содержит реверсивный счет- числения ошибки, где она используетсячик,усредняющий сигнал ошибки с выхода в качестве эталонного сигнала, схемы сравнения.
Ошибка, используемая для подстрой-Когда в результате компенсации
ки адаптивного корректора 5, а такжеадаптивными системами искажений, внотактового колебания в блоке 10 такто-симых каналом связи, СКО достигает
вой синхронизации, формируется блокомминимального значения, равного A3,
9 вычисления ошибки в соответствии сfO детектор 13 качества формирует логиуравнениемческую единицу, которая поступает в
Ef,Sn-af, (, )+j ( ) . (5)блок 19, содержащий таймер и RS-тригОшибка, используемая для подстрой-гер. Логическая единица с выхода деки опорного колебания, формируетсятектора 13 качества устанавливает блоком 18 вычисления ошибки в соответ-}5 RS-триггер в нулевое состояние, что ствии с уравнениемприводит к запрету подстройки адаптивuVn (U(a (..p|Ssn Sgf, SQ) (6)ного корректора, поскольку логический где f,- нормирующий множитель,. посту- ноль поступает на второй вход перемнопающий во второй блок 18 вычисленияжителя 14 и обеспечивает формирование
ошибки с третьего выхода решающего20 нулевого сигнала подстройки адаптивблока 7,ного корректора 5.
Он обеспечивает приведение длинI
всех векторов оценок информационныхПовторное включение адап гивного
символов к единичной окружности, чтокорректора 5 происходит, если е препозволяет устранить влияние амплитуд-25 вышает значение A3 и за время, необной модуляции на работу систем синх-ходимое для настройки систем синхроронизации опорного колебания и повы-низации опорного и тактового колебасить помехоустойчивость устройстваний, они не смогли без участия адападаптивного приема дискретных сигна-тивного корректора 5 достичь значения
лов с амплитудно-фазовой модуляцией.30 ошибки, равного A3. При этом на выходе
С целью предотвращения расстройкидетектора 13 качества формируется ло- адаптивных систем при воздействии нагический ноль, который, поступая в передаваемый сигнал мультипликативных блок 19, осуществляет запуск таймера, помех в предлагаемом устройстве пре-Таймер формирует интервал времени, дусмотрено прекращение подстройки ада-з5 необходимый для настройки систем синх- птивных систем в зависимости от вели-ронизации опорного и тактового коле- чины остаточной СКО ко.мпенсации иска-баний. Если на протяжении этого интер- жений, вносимых каналом связи. Длявала на выходе детектора 13 сохраня- этого в него введены детекторы 11-13ется логический ноль, то на выходе качества, элемент И-НЕ 20, элемент И40 таймера формируется сигнал, устанав- 21, перемножители 14, 16, 17, а такжеливающий на выходе RS-триггера логи- блок 19 формирования сигнала запретаческую единицу, что обеспечивает раз- подстройки адаптивного корректора.,решение дальнейшей подстройки адаптивСтруктуру детектора качества можноного корректора 5. Чтобы исключить рассмотреть на примере первого детек-45 из интервала времени, отводимого на тора 11 качества, содержащего сумма-настройку систем синхронизации опор- торы и схемы возведения в квадрат.,ного и тактового колебаний, время воз- обеспечивающие вычисление ошибки вдействия на сигнал кратковременных соответствии с выражением перерывов связи и скачков уровня, пре- ej (S{;f,-а, )+( ) . (7)50 дусмотрено на время их действия пре- Детектор качества содержит такжекращать работу таймера. Для этого в схему сравнения ошибки с эталоннымблоке 19 испо.льзуется сигнал, форми- значением А (А1, А2 и A3 соответст-руемый детектором 11 качества при пре- венно для первого, второго и третьего вышении ошибкой величины А1, детекторов 11,12 и 13 качества). При55 Запрет подстройки адаптивного кор- этом схемы сравнения детекторов 11 -ректора 5 при достижении СКО минималь- 13 качества формируют логическую еди- ного значения предотвращает его рас- ницу, если , А1, и A3,стройку за счет воздействия аддитив- и логический ноль, если е А1, е,, А2 ного шума, а также кратковременных
713
перерывов связи и скачков уровня, чт обеспечивает повышение помехоустойчивости устройства адаптивного приема.
Если СКО превышает значение А1, при котором использование всех оцено информационных символов для настройк адаптивных систем может привести к их расстройке, целесообразно использовать в качестве эталонов лишь оценки информационных символов с макси- мальной помехозащищенностью. При это на выходе детектора 11 качества формируется логическая единица, которая поступает на второй вход элемента И- НЕ 20. Вместе с оценкой информацион- ного символа на четвертом выходе решающего блока 7 формируется признак подстройки адаптивного корректора 5 и систем синхронизации, который поступает на первый вход элемента И-НЕ 20. Признак подстройки адаптивных систем имеет значение логического ноля для информационных символов с максимальной помехозащищенностью и значение логической единицы для остальных информационных символов, Таким образом, при превышении ошибкой е значения A3 логическая единица с выхода детектора 11 качества перемножается с признаком подстройки адаптивных систем, что обеспечивает формирование на выходе элемента И-НЕ 20 логического ноля для информационных символов с недостаточной помехозащищенностью. Сигнал с выхода элемента И-НЕ 20 пос- тупает на первый вход элемента И 21, который обеспечивает формирование сигнала запрета подстройки адаптивных систем (логического ноля) при поступлении логического ноля с выхода де- тектора 12 качества или с выхода элемента И-НЕ 20. Появление логического ноля на выходе элемента И 21 свидетельствует о запрете подстройки адаптивных систем и обеспечивает формирование нолевых значений ошибки на выходах перемножителей 16, 17. Появление логического ноля на выходе детектора 12 качества свидетельствует о превьшении ошибкой величины А2, при которой использование оценок информационных символов в качестве эталонного сигнала приводит к расстройке адаптивных систем.
Сигнал ошибки с выхода перемножителя 16 при наличии логической единицы на выходе элемента И 21 поступает на первый вход перемножителя 15, где
198
он перемножается с оценкой фазы несущего колебания в соответствии с уравнением
e ()-ecn+jesn. (8) Это позволяет использовать ошибку, вычисленную для демодулированного сиг- нала, для подстройки адаптивного корректора 5 и блока 10 тактовой синхронизации, оперирующих с полосовым сигналом.
Далее сигнал ошибки с выхода перемножителя 15 поступает в блок 10 тактовой синхронизации и через перемножитель 14 в адаптивный корректор 5.
Работа блока 10 описывается уравнением
Гп,,Кг,,,+К ГэЛ п- 9 где Кг ,
и Кг- - вещественные числа, определяющие шаг изменения фазы тактового колебания (фазу момента стробирования принимаемого сигнала)j
3 bn esn (xsn4i X ;«.+Xcn-i-XctHi)+ecn(x5n-i- -5«sn+-t-Xcn-i) (10)
Уравнение (9) описывает систему фазовой автоподстройки частоты тактового колебания второго порядка, которая обеспечивает компенсацию расхождения как фаз, так и частот тактовых генераторов устройств передачи и приема дискретных сигналов. Поскольку принимаемый сигнал стробируется в соответствии с теоремой Котельникова с частотой дискретизации, в два раза превьшающей тактовую частоту, в блоке 10 тактовой синхронизации осуществляется прореживание сигнала йГ с тактовой частотой.
С выхода перемножителя Т7 ошибка подстройки опорного колебания л i/, поступает в систему синхронизации опорного колебания, которая включает в себя блок 22, блоки 23 и 24 и сумматор 25.
Работа блока 23 описывается уравнением
.Г ;+K„ДV(11)
где коэффициент адаптивной системы фазовой автоподстройки частоты опорного колебания вычисляется в блоке 22 в соответствии с уравнением
(12) где Kif - вещественное число, определяющее шаг изменения коэффициента, а Вц определяется уравнением
Bnfi Bh-BnK +uV.
(13)
Работа блока 24 стационарной фазовой автоподстройки частоты опорного колебания описывается уравнением
f; ,,+()+к; (& -K if dv.) + b
(14)
где к и к - вещественные числа, определяющие шаг изменения фазы опорного колебания в системе фазовой автоподстройки частоты второго порядка.
Суммарная оценка фазы несущего колебания равна
f «.-, ,+4 ;,, . (15) и вычисляется в сумматоре 25.
При наличии в канале связи качаний фазы несущего колебания с неизвестными девиацией и частотой наилучшую компенсацию фазовых флуктуации несущего колебания обеспечивает применение комбинированной системы синхронизации опорного колебания, что в значительной степени способствует повышению помехоустойчивости устройства адаптив ного приема.
Формула изобретения
Устройство адаптивного приема дне- кретных сигналов с амплитудно-фазовой модуляцией, содержащее -автоматический регулятор уровня, выход которого соединен через полосовой фильтр с первым входом аналого-цифрового преобразова- теля, второй вход которого соединен с выходом полосового фильтра через фазовращатель, первый и второй выходы аналого-цифрового преобразователя через последовательно соединенные адап- тйвный корректор, демодулятор и решающий блок соединены с первьм и вторым входами декодера, первьй и второй вб1- ходы демодулятора соединены соответственно с первым и вторым входами : первого блока вычисления ошибок, пер- вьм и второй выходы решающего блока соответственно соединены с третьим и четвертым входами первого блока вычисления ошибок, отличающе- е с -я тем, что, с целью повышения помехоустойчивости от мультипликативных помех, в него введены последовательно соединенные второй блок вычисления ошибок, первый перемножитель, блок стационарной фазовой автоподстройки частоты опорного колебания и сумматор, последовательно соедине-нные второй перемножитель, третий перемножитель и блок тактовой синхронизации, а также три детектора качества, четвертый перемножитель, элемент И, элемент И-НЕ, блок вычисления коэффициента адаптивной фазовой автоподстройки частоты опорного колебания и блок адаптивной фазовой автоподстройки частоты опорного колебания, причем первый и второй выходы аналого-цифрового преобразователя соответственно соединены с вторым и третьим входами блока тактовой синхронизации, первый выход решающего блока соединен с объединенными первыми входами всех детекторов качества и вторым блоком вы- числения ошибок, второй выход решаю- ,щего блока соединен с объединенными вторыми входами всех детекторов качества и второго блока вычисления ошибок, третий вход которого соединен с третьим выходом решающего блока, четвертый выход которого соединен с первым входом элемента И-НЕ, второй вход которого объединен с первым входом блока формирования сигнала запрета подстройки адаптивного корректора и соединен с выходом первого детектора качества, третий вход которого объединен с третьими входами второго и третьего детекторов качества и четвертым входом второго блока вычисления ошибок и соединен с вторым выходом демодулятора, первьш выход которого соединен с объединенными четвертыми входами первого, второго и третьего детекторов качества и пятым входом второго блока вычисления ошибок, выход второго детектора качества соединен с первым входом элемента И, выход которого соединен с объединенными первыми входами первого и второг перемножителей, второй вход второго перемножителя соединен с выходом первого блока вычисления ошибок, выход третьего детектора качества соединен с вторым входом блока формирования сигнала запрета подстройки адаптивног корректора, выход которого через четвертый перемножитель соединен с третьим входом аналого-цифрового преобразователя, выход первого перемножителя соединен с объединенными входами блока вычисления, коэффициента адаптивно фазовой автоподстройки частоты опорного колебания и входом блока адаптивной фазовой автоподстройки частоты опорного колебания, второй пход и выход которого соединены соответственно с выходом блока вычисления коэффиn130931912
циента адаптивной фазовой автоподст- третьего перемножителя, выход которо- ройки частоты опорного колебания и го соединен с вторым входом четверто- входом сумматора, подключенного к тре- го перемножителя, выход полосового тьему входу демодулятора, третий вы- фильтра соединен с входом автомати-- ход которого соединен с вторым входом ческого регулятора уровня.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕМОДУЛЯЦИИ КРАТКОВРЕМЕННЫХ СИГНАЛОВ С МНОГОУРОВНЕВОЙ АБСОЛЮТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ В УСЛОВИЯХ ЗАМИРАНИЙ | 2018 |
|
RU2684605C1 |
| Устройство адаптивного приема дискретных сигналов | 1982 |
|
SU1113891A1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ОПОРНОГО СИГНАЛА ВЫЧИСЛИТЕЛЬНЫМИ СРЕДСТВАМИ В СИСТЕМАХ ЧАСТОТНОЙ И ФАЗОВОЙ СИНХРОНИЗАЦИИ ШИРОКОПОЛОСНЫХ СИСТЕМ СВЯЗИ | 2013 |
|
RU2535198C1 |
| ПАРАЛЛЕЛЬНЫЙ КОРОТКОВОЛНОВЫЙ МОДЕМ | 2004 |
|
RU2286648C2 |
| Устройство демодуляции кодоимпульсных сигналов с фазовой манипуляцией | 1974 |
|
SU547973A1 |
| Устройство для приема дискретных сигналов | 1986 |
|
SU1374444A1 |
| ЦИФРОВОЙ ПРИЕМНИК ДИСКРЕТНЫХ СИГНАЛОВ С "ВРАЩАЮЩЕЙСЯ ФАЗОЙ" | 1991 |
|
RU2038703C1 |
| Устройство для приема сигналов с относительной фазовой манипуляцией | 1990 |
|
SU1714816A1 |
| ЦИФРОВОЙ МОДЕМ КОМАНДНОЙ РАДИОЛИНИИ ЦМ КРЛ | 2013 |
|
RU2548173C2 |
| Устройство адаптивной обработки дискретных сигналов | 1982 |
|
SU1116542A2 |
Изобретение относится к электросвязи. Цель изобретения -, повьшение помехоустойчивости от мультипликативных помех„Устройство содержит автоматический регулятор i уровня, «о- лосовой фильтр 2, фазовращатель J, . АЦП 4, адаптивный корректор 5, демодулятор 6, решающий блок 7, декодер (Л с: Ьо О г 00 со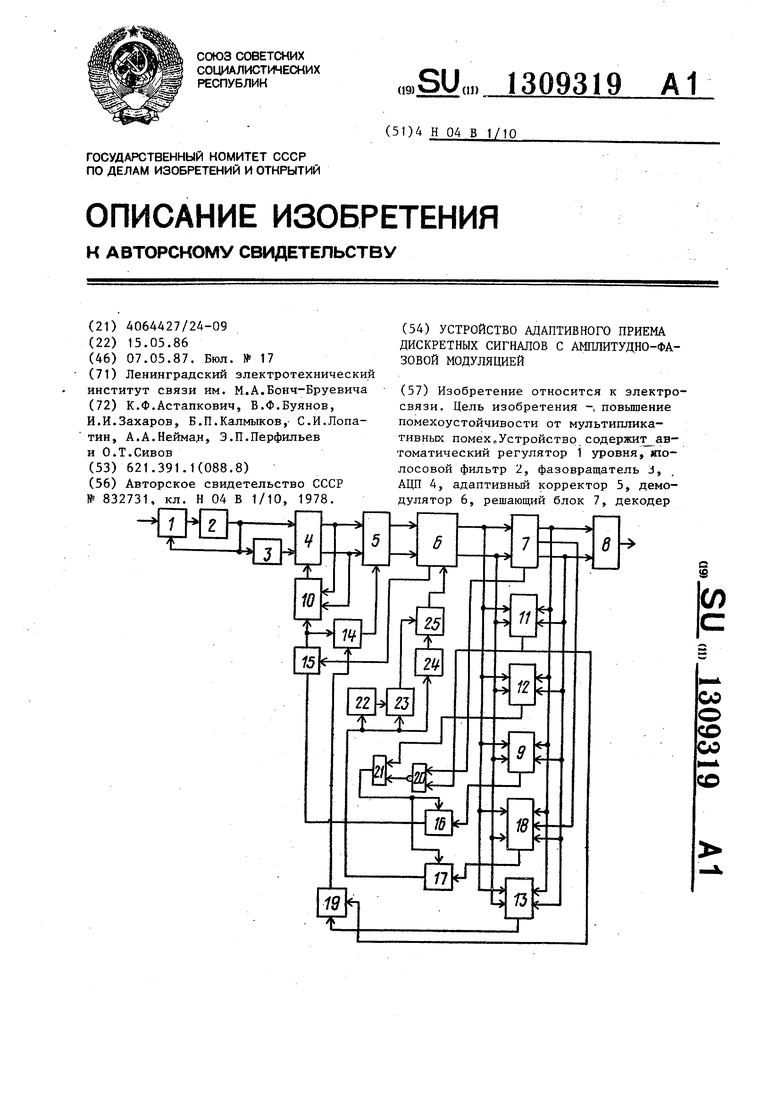
| Способ адаптивной обработкидиКСРЕТНыХ СигНАлОВ и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1978 |
|
SU832731A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
