.
/W
ГС
о
00
Изобретение относится к технике электросвязи и может использоваться для нриема сигналов, сформированных однонолосными и двухнолосны.ми методами модуляции.
Цель изобретения - новышение помехоустойчивости нутем компенсации статической ошибки.
На фиг. 1 представлена структурная электрическая схема предложенного цифрового приемника; на фиг. 2 - вариант вы- по. 1нения блока интеграторов.
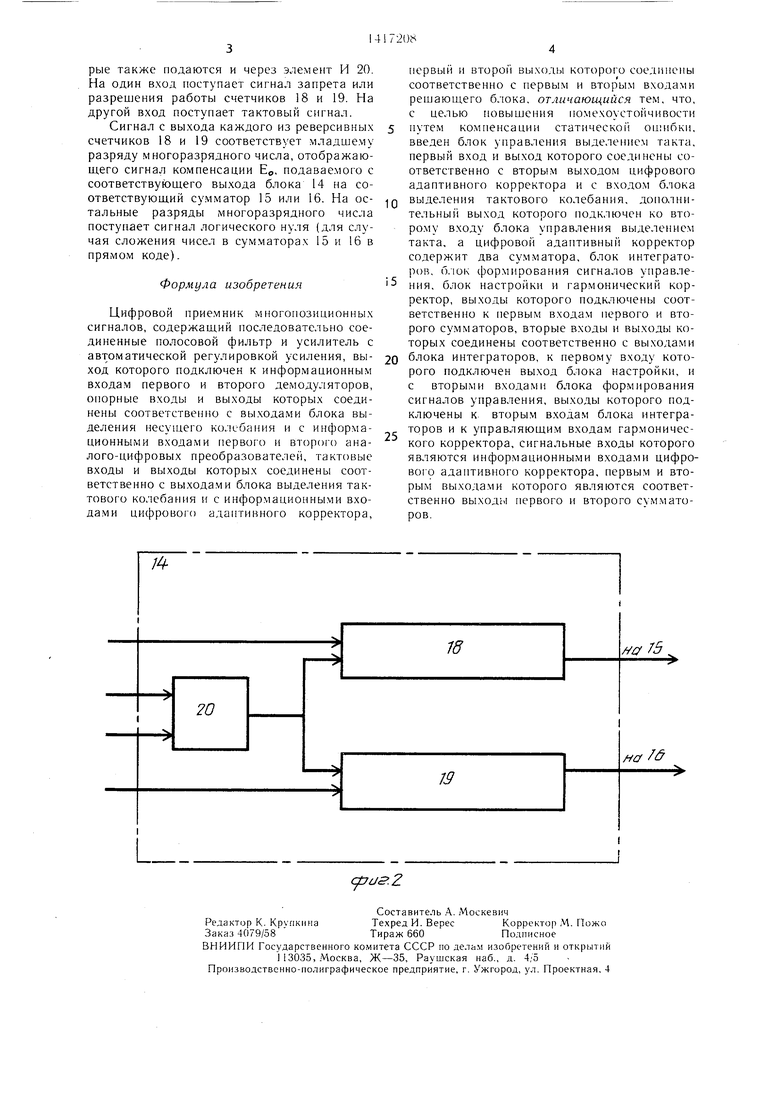
Цифровой приемник многопозиционных сигналов содержит решающий блок 1, полосовой фильтр 2, усилитель 3 с автоматической регулировкой усилителя (АРУ), первый и второй демодуляторы 4 и 5, блок б выде тения песущего колебания, первый и второй аналого-цифровые преобразователи 7 и 8, блок 9 управления выделением такта, блок 10 выделения тактового колебания, цифровой адаптивный корректор 11, состоящий из гармонического корректора 12, блока 13 формирования сигналов управления, блока 14 интеграторов, первого и второго сумматоров 15 п 16, блока 17 настройки.
Блок 14 интеграторов (фиг. 2) содер-жит два реверсивных счетчика 18 и 19 и элемент И 20.
Цифровой нриемник работает следующим образом.
Л одулированный сигнал (. 1), сформированный однонолоснымп и., 1п двухполос- ными мно1Ч)11)зицнон1Н)1ми методами моду- . 1ЯЦИИ, ностч паот на вход приемника и ограничивается по спектру юлосовы.м фильтром 2. В усп.пителп 3 с АРУ в.ходной спгпал ста- бп:1изп пется по уровню и затем поступает па первый и второй демодуляторы 4 и 5, на liTopbie входы которых из блока 6 выделения несущего колебания подаются сдвинутые по фазе друг относительно друга на 90° несущие колебания.
Дем оду.:i про ванные сигналы с выходов 11ерв()1-о п второго демодуляторов 4 и 5 поступают в первый и второй аналого-цифровые п)еобразователи 7 и 8 соответственно, где осуществляется стробирование демоду- лированпых аналоговых сигналов в отсчет- 1{ые моменты вре.мени, запоминание и хранение амнлитуд полученных напряжений выборок и преобразование этих напряжений в гп-разрядные двоичные кодовые числа. В нервом и втором аналого-цифровых преобразователях 7 и 8 с целью улучшения условий выделения тактового колебания осуществляется стробирование демодулированных сигналов в моменты времени, соответствую- нше серединам и границам принимаемых элементов сигнала. Импульсные последовательности, но которым осуществляется стробирование и преобразование демодулирован- пых сигналов, ноступают с первого и второго выходов блока 10 выделения тактового колебания. С выходов нервого и irroporo анало
го-цифровых преобразователей 7 и 8 два гп-разрядных кодовых числа (выборки) по- стунают в цифровой адаптивный корректор 11, где в соответствии с выбранным алго- ритмом коррекции осуществляется мини.ми- зация межсимвольной интерференции в принимаемых сигналах данных, обусловленная неравномерностью частотных характеристик канала связи. Откорректированный сигнал в виде многоразрядных кодовых чисел поступает в решающий блок 1, где осуществляется его декодирование, и далее на выход цифрового приемника.
В блоке 13 осуществляется формирование оценок откорректированных сигналов и
вычисление вектора ощибки Е. Однако в сигналах на выходах гармонического корректора 12 имеет место статическая ощибка ЕО, обусловленная неидеальностью аналоге-, вых узлов приемника. С целью ее компенсации используют первый и второй сумматоры 15 и 16 и блок 14 интеграторов. Для этого из сигналов на выходах гармонического корректора 12 необходи.мо вычесть проинтегрированные сигналы ощибки. Эта операция реализуется блоком 14 интеграторов и первым
5 и вторым сумматорами 15 и 16. С целью уменьшения дисперсии откорректированного сигнала, возникающей за счет непрерывной адаптивной компенсации статической ошибки, в цифроБо.м адаптивном корректоре 11 используется блок 17, разрещающий адап- тивную компенсацию Е только в определенные моменты времени. 6 остальное время сигналы на выходах блока 14 интеграторов не изменяются и тем самым дисперсия откорректированного сигнала уменьщается.
Использование парциальной настройки оправдано, поскольку ЕО нескачкообразно изменяется во времени.
Сигнал со второго выхода цифрового адаптивного корректора 11 поступает на
блок 9, служащий для формирования сигналов управления работой блока 10 выделения тактового колебания. Алгоритм работы блока 9 основан на формировании сигналов управления работой блока 10 путем анализа
5 сигналов, соответствующих серединам двух соседних нринимаемых элементов сигнала, формировании (по результатам анализа) сигнала, соответствующего сигналу на границе между эtими элементами, и сравнении сформированного сигнала с эталонным.
0 Из рассмотрения алгоритма работы блока 9 следует, что точность формирования сигналов управления в блоке 9 управления выделением такта существенно снижается при наличии ЕО. Следовательно, компенсация ЕО приводит к повышению точности подстройки тактового колебания.
На соогр етствующие входы блока 14 (фи1. 2) поступают сигналы управления работой реверсивных счетчиков 18 и 19, которые также подаются и через э;1емент И 20. На один вход поступает сигнал запрета или разрешения работы счетчиков 18 и 19. На другой вход поступает тактовый сигнал.
Сигнал с выхода каждого из реверсивных счетчиков 18 и 19 соответствует младшему разряду многоразрядного числа, отображающего сигнал компенсации ЕО, подаваемого с соответствующего выхода блока 14 на соответствующий су.мматор 15 или 16. На остальные разряды многоразрядного числа поступает сигнал логического нуля (для случая сложения чисел в сум.маторах 15 и 16 в прямом коде).
Формула изобретения
Цифровой приемник многопозиционных сигналов, содержащий последовательно соединенные полосовой фильтр и усилитель с автоматической регулировкой усиления, выход которого подключен к информационным входам первого и второго демоду.чяторов, опорные входы и выходы которых соединены соответственно с вы.ходами блока выделения несущего колебания и с информационными входами первого и второго аналого-цифровых преобразователей, тактовые входы и выходы которых соединены соответственно с выходами блока выделения тактового колебания и с информационными входами цифрового адаптивного корректора.
0
0
5
первый и втором выходы которого соединены соответственно с первым и вторым входами решающего блока, отличающийся тем, что, с целью повышения помехоустойчивости путем компенсации статической оп:ибки, введен блок управления выделением такта, первый вход и выход которого соединены соответственно с вторым выходом цифрового адаптивного корректора и с входом блока выделения тактового колебания, дополнительный выход которого подключен ко вто- ро.му входу блока управления выделением такта, а цифровой адаптивный корректор содержит два сумматора, блок интеграторов, б. юк формирования сигналов управления, блок настройки и гармонический корректор, выходы которого подключены соответственно к первым входам первого и второго сумматоров, вторые входы и выходы которых соединены соответственно с выходами блока интеграторов, к первому входу которого подключен выход блока настройки, и с вторыми входами блока формирования сигналов управ,1ения, выходы которого подключены к вторым входам блока интеграторов и к управляющим входам гар.моничес- кого корректора, сигнальные входы которого являются информационными входами цифрового адаптивного корректора, первым и вторым выходами которого являются соответственно выходы первого и второго сумматоров.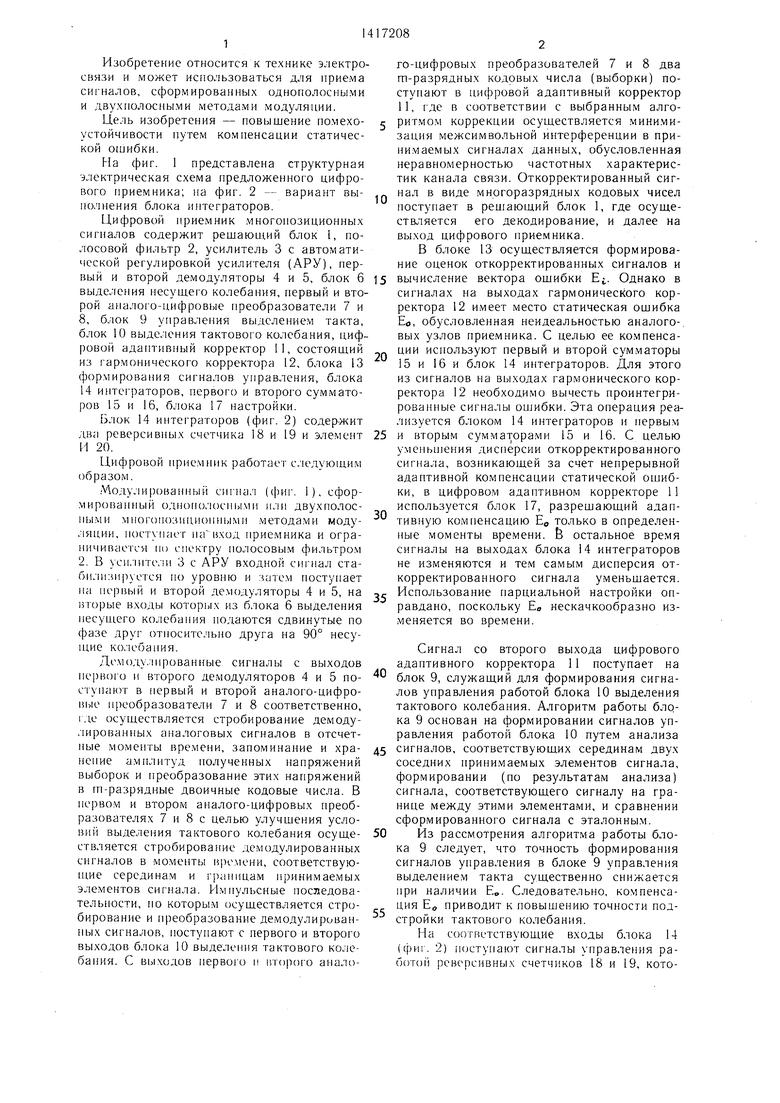
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный цифровой корректор | 1979 |
|
SU794734A1 |
| Устройство для адаптивной коррекции межсимвольной интерференции | 1981 |
|
SU951724A1 |
| Приемник сигналов с парциальным откликом | 1983 |
|
SU1117854A1 |
| Цифровой приемник многопозиционных сигналов | 1982 |
|
SU1062890A1 |
| Устройство для преобразования сигналов | 1984 |
|
SU1234991A1 |
| Цифровой адаптивный корректорСигНАлА | 1978 |
|
SU832733A1 |
| Аналого-цифровой приемник сигналов данных | 1989 |
|
SU1635277A1 |
| Адаптивный корректор сигнала | 1978 |
|
SU794735A1 |
| Адаптивный корректор | 1989 |
|
SU1688418A1 |
| Адаптивный корректор межсимвольной интерференции | 1987 |
|
SU1540009A1 |
Изобретение относится к электросвязи и иозволяет повысить поме.хоустойчивость путем ко.мненсации статической ошибки. Устр-во содержит решающий блок 1, полосовой фильтр 2, усилитель 3 с АРУ, демодуляторы 4 и 5, блок 6 выделения несушего колебания, АЦП 7 и 8, блок 9 управления выделение.м такта, блок 10 выделения тактового колебания и цифровой адаптивный корректор (ЦАК) II, состоящий из гар.мо- нического корректора 12, блока 13 фор.мирования сигналов управления, б.чока 14 раторов, сумматоров 15 и 16 и блока 17 па- стройки. В.ходной сигнал демодулируется в де.модуляторах 4 п 5 с помощью necynuix колебаний, выделепных блоком 6 п сдвинутых по фазе друг относительно друга па 90°. Дс- модулированные аналоговые сигналы преобразуются в цифровые. В ЦАК I I осуществляется коррекция сигнала путе.м минимизации межспмвольной интерференции прини- .маемых сиг палов данных. Откорректированный сигнал декодируется в решающем блоке I. Помехоустойчивость повышается за счет того, что в Ц.К I I коррекция статической ошибки осуа1ествляется не непрерьп - но, а в определенпые моменты времепн, а стробированпе в АЦП 7 и 8 осуществ. 1яет- ся после анализа во введенном блоке 9 сигналов, соотв. серединам двух соседних элементов откорректированног о сигнала, п подстройки тактового Колебапия. 2 и.м. S (Л
L
Составитель .Д.. Москевнч
Редактор К. КрупкннаТехред И. ВересКорректор . Пожо
Заказ 4079/58Тираж 660Подписное
ВНИИПИ Государственного ко.митета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская иаб., д. 4/5 Производственно-иолиграфическое предприятие, г. Ужгород, ул. Проектная, 4
cpij.Z
| Цифровой приемник многопозиционных сигналов | 1982 |
|
SU1062890A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
