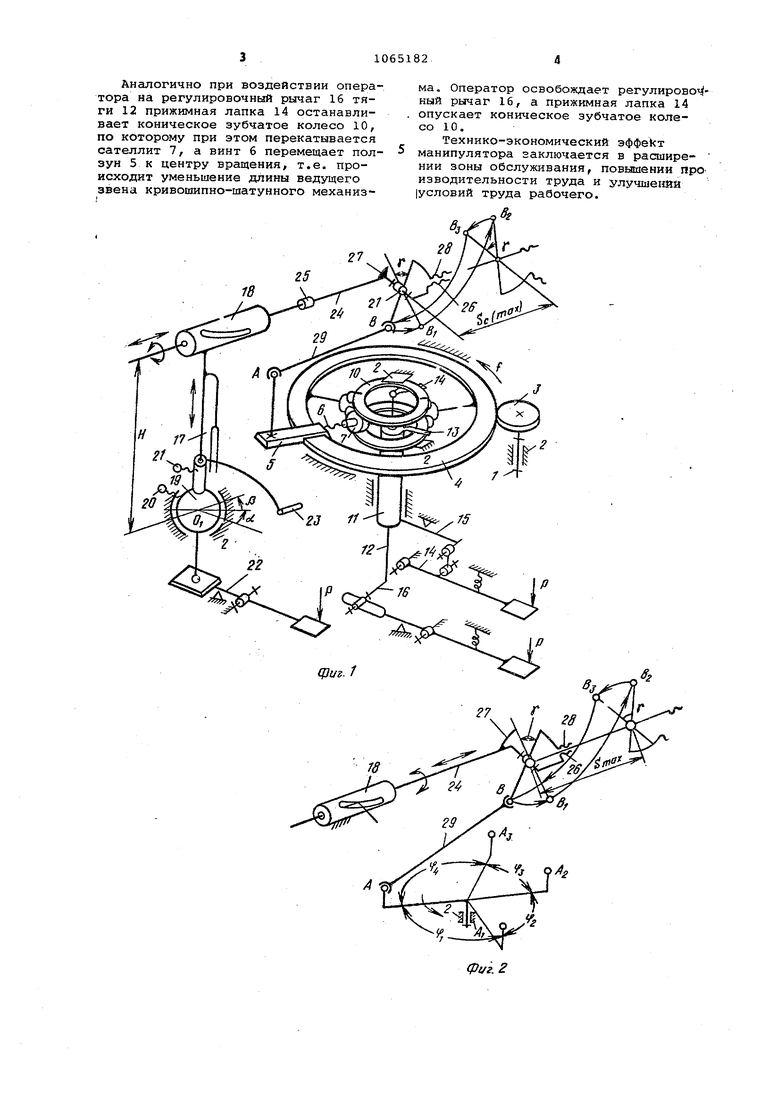
Изобретение относится к устройст вам для выполнения вспомогательных операций, связаннык с изменением по ложения изделий, и может быть приме нено в различных отраслях прог/иошлен ности для легких предметов в целях автоматизации ручного труда. Известно устройство, содержащее корпус, стержень с.ограничителем и с имеющей винтообразную прорезь направляющей втулкой, охват, одна губ ка которого жестко закреплена на ко це стержня, а другая шарнирно связа на с ним и с кривошипно-гаатунным механизмом, а также привод. Недостатками известного устройст ва являются малая маневренность схва та, а следовательно, ограниченность зоны обслуживания и н-изкая производительность. Цель изобретения - расширение зоны обслуживания и повьшение производительности. Поставленная цель достигается тем что манипулятор, содержащий корпус, стержень с ограничителем и с имеющей винтообразную прорезь втулкой, схват одна губка которого жестко закреплена на конце стержня, а другая шарнирно связана с ним и с кривошипношатуииым механизмом, а также привод дополнительно снабжен зубчатым колесом с радиально расположенным на его торце ползуном,- дифференциальным механизмом и втулкой с вставленной в нее тягой на каждой из которых закреплены прижимная лапка и регулировочный рычаг, причем зубчатое колесо, втулка и тяга установлены на оси кривошипно-шатунного механизма, а внутри зубчатого колеса смонтирован дифференциальный механизм, сателлит которого кинематически связан с ползуном, а последний соединен через шатун кривошипно-шатунноГо механизма с шарнирной губкой схвс1та. На фиг, 1 изображена принципиальная схема предлагаемого устройства; на фиг. 2 - кинематическая схема манипулятора; на фиг. 3 узел кривошипно-шатунного механизма; на фиг, 4 - разрез А-А на фиг. Зо Манипулятор содержит {фиг, 1) вал 1, корпус 2, приводное колесо 3, зубчатое коласо 4, на торце которого в радиальном пазу находится ползун 5 С винтом 6. Внутри зубчатого колеса помещен дифференциальный механизм (фиг. 3 и 4), состоящий из сателлита 7, уравновешивающего колеса 8, и конических зубчатых колес 9 и 10. Соосно с зубчатым колесом установлены втулка 11 и тяга 12, которые снабжены соответственно прижимными лапками 13 и 14 л регулировочными рычагдми 15 и 16. Кроме того, манипулятор содержит стойку 17, на которой с одной стороны смонтированы направляющая втулка 18 с винтообразной прорезью, а с другой стороны - сферический шарийр 19 с фиксирующими винтами 20 и 21 и регулировочными рычагами 22 и 23, В винтообразную прорезь направляющей втулки вставлен выступ Г-образного стержня 24 с фиксирующим винтом 25. На другом конце стержня жестко закреплена губка 26 охвата и ограничитель 27, а вторая губка 28 схва-та шсфнирно соединена с первой и с, шатуном 29 кривошипно-шатуняого механизма, который, в свою очередь, шарнирно соединен с выступом ползуна. Манипулятор работает следующим образом. От приводного колеса 3 (фиг. 1) вращение передается зубчатому колесу. 4, винту б и ползуну 5, т.е. ведущему звену ОД кривошипно-шатунного механизма. В результате его поворота на угол Ц) (фиг. 2) губка 28 поворачивается на угол у , шарнир В занимает положение В, срабатывает ограничитель 27, и звенья становятся единой жесткой конструкцией, Губкя схвата разомкнуты. Осуществляется Разгрузка операция В результате поворота ведущего звена на угол tf шарнир В занимает положение В, при этом стержень 24 перемещается вдоль своей оси на расстояние и одновременно вращается вокруг своей оси. Губки схвата раскрыты, совершается Холостой ход. При повороте ведущего звена на шарнир В занимает положение В ограничитель 27 размыкается, а губка 28 смыкается с губкой 26, захватывая предмет. Осуществляется операция Захват. При повороте ведущего звена на угол . шарнир В возвращается в исходное положение, губки сомкнуты. Осуществляется операция Перемещение . Цикл закончен. Регулировка положения стержня со схватом по высоте Н осуществляется рычагом 22, а по углам pi, и ft рычагом 23.. Регулировка величины 5 д долевого перемещения стержня со схватом осуществляется рычагами 15 и 16 и винтом 25, Оператор воздействует на регулировочный рычаг 15, прижимная лапка 13 втулки 11 прижимает коническое колесо 9 к корпусу 2, останавливая колесо. Сателлит 7 перекатывается по иему, что вызывает благодаря винту б выдвижеикэ ползуна 5 и увеличение длины ведущего звена кривошипно-шатунного механизма. Затем оператор освобождает регулировочный рычаг, прижимная лапка 13 опускает коническое зубчатое колесо 9, Аналогично при воздействии опера тора на регулировочный рычаг 16 тяги 12 прижимная лапка 14 останавливает коническое зубчатое колесо 10, по которому при этом перекатывается сателлит 7, а винт 6 перемещает пол зун 5 к центру вращения, т.е. происходит уменьшение длины ведущего звена кривошипно-шатунного механизфиг. г ма. Оператор освобождает регулирово ный рычаг 16, а прижимная лапка 14 опускает коническое зубчатое колесо 10. Технико-экономический эффект манипулятора заключается в расширеНИИ зоны обслуживания, повышении прО изводительности труда и улучшегсйи 1УСЛОВИЙ труда рабочего.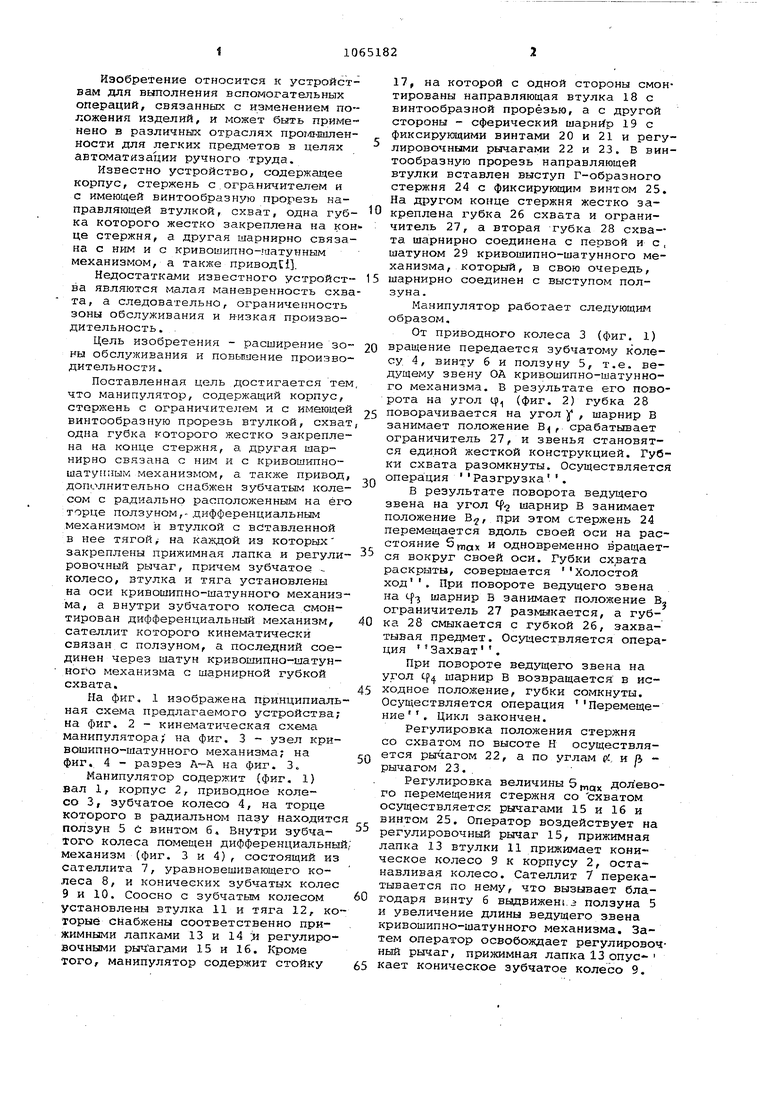
| название | год | авторы | номер документа |
|---|---|---|---|
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) И СПОСОБ ИДЕНТИЧНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАПЕЦИЕВИДНЫМ КАЧАЮЩИМСЯ РЫЧАГОМ С РАДИАЛЬНОЙ ТЯГОЙ И МНОГОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2760795C1 |
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
| КРАЕОБМЕТОЧНАЯ ШВЕЙНАЯ МАШИНА | 2011 |
|
RU2493302C2 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356725C1 |
МАНИПУЛЯТОР, содержащий кор пус, стержень с ограничители и с имеющей винтообразную прорезь направляющей втулкой, схват одна губка которого жестко закреплена на конце стержня, а другая шарнирно связана с ним и с кривопшпно-шатунньгм механизмом, а также привод, отличающийся тем, что, с целью расширения зоны обслуживания и повьзшения производительности, он снабжен зубчатым колесом с радиально расположенным на его торце ползуном, дифференциальным механизмом и втулкой с вставленной в нее тягой на каждой из которых закреплена прижимная и регулировочный рычаг, причем зубчатое колесо, втулка и тяга установлены на оси кривошипно-шатунного механизма, а внутри зубчатого колеса смонтирован дифференциальный § механизм, сателлит которого кинематически связан с ползуном, а последний соединен через шатун кривошипношатунного механизма с шарнирной губкой схвата.
0
14
8
Фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Наруслишзили Г.И | |||
| Кинематическое исследование пространственного пятизвенного механизма с остановами | |||
| Труды Грузинского политехнического института им | |||
| В.И | |||
| Ленина, 1980, с | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
