Изобретение относится к устройствам для манипулирования малогабаритными изделиями в пространстве с целью механизации ручного труда и может быть применено в различных отраслях промышленности, в частности машиностроении.
Цель изобретения - расширение зоны обслуживания и обеспечение фиксации положения схвата.
На чертеже приведена принципиальная схема манипулятора.
На валу 1, который свободно вставлен в корпус 2, жестко закреплено ведущее зубчатое колесо 3 и фрикционный диск 4. На валу 1 также свободно насажен конический фрикционный диск 5 и пружина 6. Диски 4 и 5 образуют муфту включения. Фрикционный диск имеет цилиндрический паз 7, в котором свободно установлен ролик 8, Последний и прижимная лапка 9 шарнирно связаны с рычагом 10 через тяги 11,которая перемещается в вертикальном направлении в корпусе 2 вдоль вала. Фрикционный диск 5 одновременно представляет собой зубчатое колесо, которое сцеплено с зубчатым колесом 12 электродвигателя.
Зубчатое колесо 3 сцеплено с ведомым зубчатым колесом 13, которое свободно вращается в горизонтальной плоскости в корпусе 2, К зубчатому колесу 13 жестко прикреплен Г-образный элемент-отвод 14 для закрепления на нем механической руки,
Зубчатое колесо 13 имеет выступ 15, с помощью которого оно связано с валом 16 через продольный паз 17. Вал 16 свободно расположен по оси вращения колеса 13 и кроме вращения вместе с ним имеет возможность осевого перемещения.
Полый вал 16 также свободно вставлен в корпус 2 с возможностью осевого перемещения по стрелке I. Полый вал 16 имеет отвод 18, который посредством оси 19 шарнирно связан с втулкой 20. Последняя свободно насажена на полый стержень 21, представляющий собой механическую руку, которая через ось 22 шарнирно связана с Г-образным отводом 14 колеса 13.
На конце полого стержня 21 жестко закреплены губка 23 и ось 24. На последней свободно сидит коромысло 25, которое пружиной 26 замыкает губку 27. Свободный конец коромысла 25 нитью 28 кинематически связан с рычагом 29 (для раскрытия губок) через кольцо 30 и направляющие ролики 31 и 32, сидящие на осях 33 и 22. При этом ось 33 жестко связана с колесом 13. Рычаг 29 свободно сидит на неподвижной оси 34 и уравновешен пружиной 35.
Рычаг 36 свободно сидит на оси 37. На свободном вилкообразном конце рычага 36
шарнирно сидят ролики 38, которые вставлены в цилиндрические пазы 39 полого вала 16. Последний с помощью силы тяжести стремится вниз и упирается в корпус 2.
Манипулятор работает следующим образом.
При включении электродвигателя непрерывно вращаются фрикционные диски 4 и 5 и вместе с ними вращается вал 1 и
0 зубчатое колесо 3, т.е. муфта включена пружиной 6. Ведущее зубчатое колесо 3 вращает колесо 13, вместе с ним вращается полый стержень 21, т.е. механическая рука с губками схвата, по окружности. Для остановки
5 механической руки в нужном положении необходимо размыкание муфты, которЪе осуществляется рычагом 10. Нажимая на рычаг 10, ролик 8 давит на цилиндрическую поверхность паза 7 цилиндрического диска 5, пру0 жина 6 сжимается, фрикционные диски 4 и 5 разводятся, и муфта включается, Одновременно прижимная лапка 9 прижимается к поверхности фрикционного диска 4 и с помощью сил трения мгновенно останавлива5 ется вал 1 (т.е. схват). После схватывания предмета для дальнейшего перемещения рычаг 10 освобождается и механическая рука перемещается.
Величина радиуса R перемещения схва0 та связана с величиной перемещения вала 16, который поднимается с помощью рычага 36. При этом меняется высота Н подъема схвата. При воздействии на рычаг 36 он поворачивается вокруг оси 37, и ролики 38
5 поднимают вал 16 вверх относительно торцовой плоскости зубчатого колеса 13, что вызывает перемещение механической руки вверх. При снятии усилия с рычага 36 вал 16 опускается под действием силы собствен но0 го веса.
Раскрытие губок 23 и 27 производится с помощью рычага 29 независимо от того, движется механическая рука (полый стержень) или находится в неподвижном состо5 янии. При действии усилия на рычаг 29 пружины 26 и 35 растягиваются, рычаг поворачивается вокруг оси 34 и оттягивает кольцо 30 и нить 28 вниз, что вызывает раскрытие губок 23 и 27 независимо от того,
0 вращается колесо 13 или оно неподвижно. Благодаря направляющим роликам 31 и 32 расстояние, т.е. длина гибкой нити 28 от точки схвата до точки кольца 30, постоянно. При перемещении вала 16 вверх или вниз
5 нить 28 на участке изгиба около ролика 31 перемещается в продольном пазу 17 вала 16.
Таким образом, с помощью трех рычагов 10, 29 и 36 осуществляется манипулирование объектом, т.е. остановка руки,
схватывание объекта, транспортировка его и в нужный момент подъем схваченного объекта и выгрузка его на соответствующем участке.
Формула изобретения Стержневой манипулятор, содержащий корпус, смонтированную в нем механическую руку с захватом, механизм подъема механической руки, выполненной в виде шарнирно связанных двуплечего рычага и стержня, и привод, имеющий ведущее и ведомое зубчатые колеса, причем последнее кинематически связано с механической рукой и с рычагами управления схватом, отличающийся тем,
5
что, с целью расширения зоны обслуживания и обеспечения фиксации положения схвата в любой точке этой зоны, он снабжен полым валом, расположенным свободно по оси ведомого зубчатого колеса и имеющим продольный паз под выступ, дополнительно выполненный на этом колесе, а также кинематически связанным с ведущим зубчатым колесом механизмом фиксации положения схвата, выполненным в виде фрикционных конических дисков, взаимодействующих между собой посредством пружин и рычага, а также Г-образным элементом, жестко закрепленным на ведомом зубчатом колесе, при этом полый вал кинематически связан с механической рукой.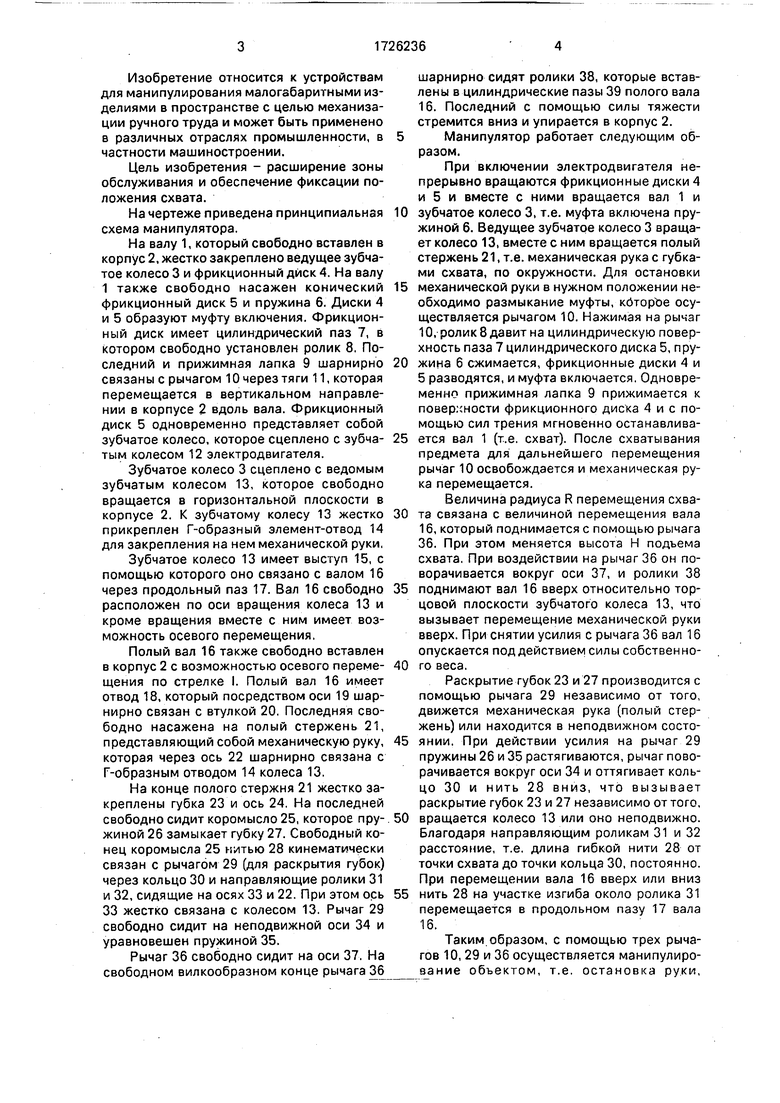
| название | год | авторы | номер документа |
|---|---|---|---|
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Стержневой манипулятор | 1987 |
|
SU1414621A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Стержневой манипулятор | 1986 |
|
SU1328190A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ КРИВЫХ | 1971 |
|
SU435147A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Манипулятор | 1982 |
|
SU1065182A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
Использование: в устройствах для подачи, транспортировки и разгрузки малогабаритных изделий. Сущность: имеется механизм фиксации схвата, выполненный в виде фрикционных конических дисков 4 и 5, взаимодействующих между собой посредством пружин и рычага 10. Г-образный элемент- отвод, жестко закрепленный на ведомом зубчатом колесе 13, кинематически связан с механической рукой посредством пологр вала 16, имеющего продольный паз. Вал 16 установлен по оси ведомого колеса 13, выполненного с выступом под продольный паз полого вала 16 и образующего скользящее соединение колеса 13 и вала 16. 1 ил.
| Стержневой манипулятор | 1986 |
|
SU1328190A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
