количества поступательных парр работающих с повьтгенным износом. При вкгаочении двигателя начинает вра- Е1аться вал, который через зубчатые колеса 3-4 передает вращение точке А кривошипа с регулируемым радиусом ОА, Через шатун 20 и двуплечий рычаг 21 осуществляются линейное перемещение и вращение стержня 23, разке щенного во втулке 22, связанной шаровой поверхностью с корпусом. IlptJ повороте точки А на угол qj, осущестИзобретение относится к машиностроению, в частности к устройствам дня выполнения вспоногательньтх операций, связанных с измеяет ем по-по-- жения изделий, и может быть npHi-sene- но для автоматизации технологических процессов.
Целью изобретения является повышение надежности и, упрощение конст- рзпсции за счет уменьшения количест- ва поступательных пар,, работающих с повышенным износом.
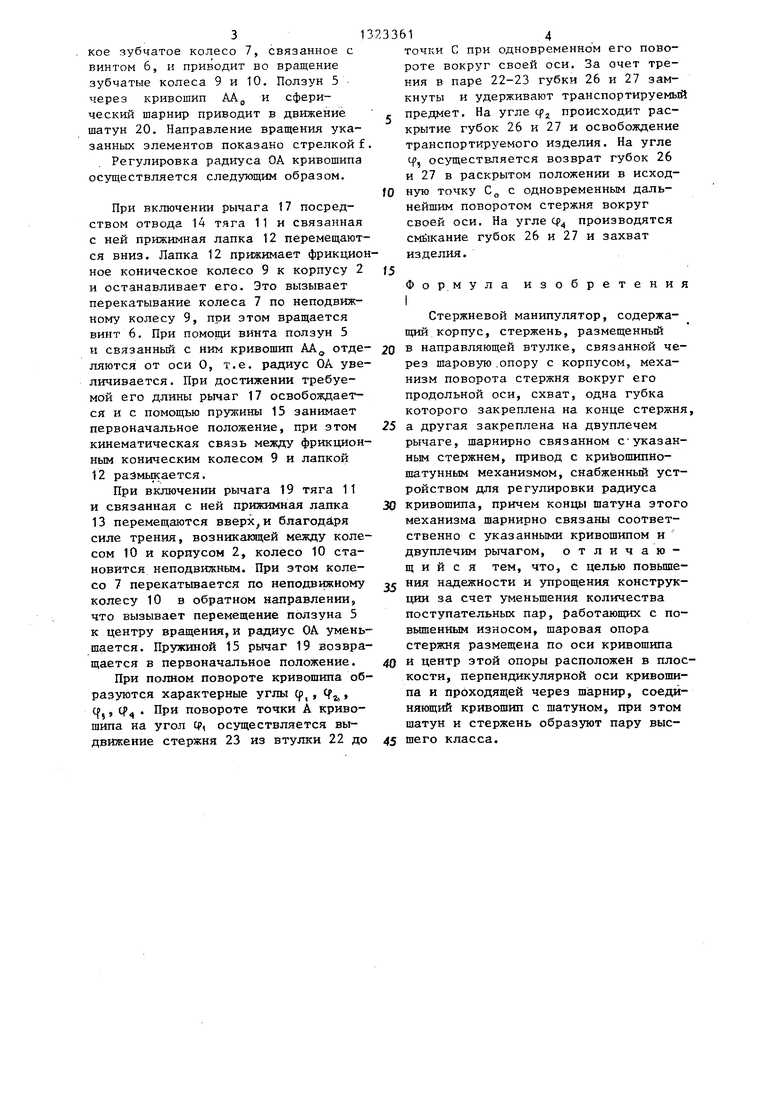
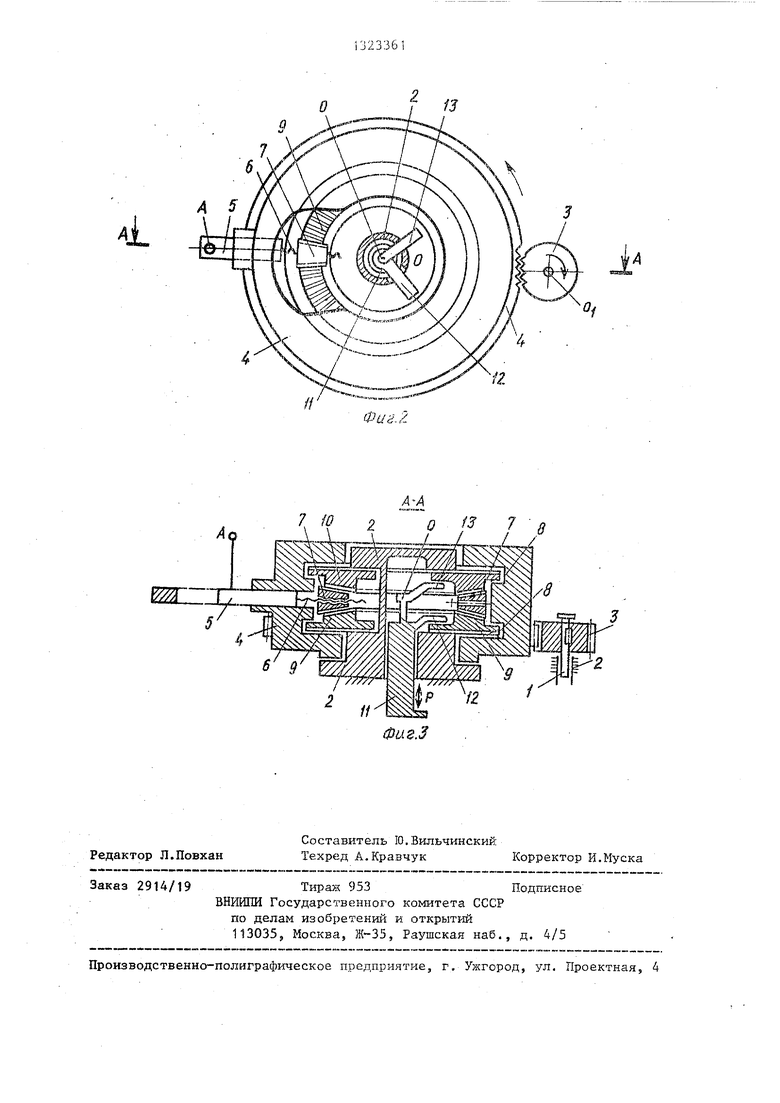
На фиг. 1 показана кинематическая схема манипулятора; на фиг. 2 - сха- ма устройства для регулировки оадн;/- са кривошипа; на фиг. 3 paspc j А-А на фиг„ 2.
На валу 1 (фиг, 1), смонтирова1;;нс в корпусе 2, закреплено зубчатое колсо 3, которое зацепляется с зубчатьрм колесом 4, размещенным в цилиндрической выемке корпуса 2. Зубчатое колесо 4 имеет радиальный паз, в котором помещен ползун 5. В; последнему с одной стороны прикреплен криню- шип ААд, а на другой стороне выполнена резьба, с которой винт образует кинематическую пару. На торце винта 6 закреплено коническое зубчатое колесо 7. В цилиндрических выемках 8 зубчатого колеса 4 размещен конический дифференциальный механизм, состоящий из фрикционных конических колес 9 и 10, которые находятся в зацеплении с зубчатым колесом 7. Торцовые поверхности конических колес 9 и 10 покрыты фрикционным мэ-териалом с целью повьшзения трения ме;кду нш-га и корпусом.
вляется перемеп;ение губок 26-27 с зажатым изделием, на угле Cf - разжим губок и освобождение изделия, на угле (f - возврат губок в исходное положение Сд, на угле q смыкание губок и захват изделия. При вращении точки: А кривошипа звенья 20 и 23 образуют к шематическую пару высшего класса, поэтому на углах Cf, и (4 з помимо линейного перемещения звена 23 осуществляется его поворот вокруг продольной оси. 3 ил.
13 дифференциальном механизме относительно зубчатого колеса 7 установлено аналогичное зубча- i oa колесо, обеспечивающее устойчивость конструкции.
В корпусе 2 вдоль оси 00 вращения зубчатого колеса 4 установлена тяга 11. на которой закреплены прижимные лапки 12 и 13, С тягой 11 связан Т-образный отвод 14, который уравновешен закрепленной с обеих его сторон пружиной 15. На неподвижной оси 16 установлен рычаг 17, а на 1):сподвижной оси 18 - рычаг 19. Отвод 1ч расположен в продольных пазах рычагов 17 и 19„ Кривошип ААд связан шатуном 20 с двуплечим рычагом 21 через две сферические кинематические пары А и В. Сферический шарнир D с рукояткой С жестко связан с втулкой 22, в которой проходит направляющий стержень 23. Центр сферического шарнира D совпадает с центром вращения кривошипа ОА. Шарнир D крепится на корпусе 2 винтом 24. Между втулкой 22 и стержнем 23 имеется принудительное сопротивление. На стержне 23 жестко закреплены ограничитель 25 и губка 26. Шарнирно связанный со стержнем 23 рычаг 21 снабжен губкой 27„
Предлагаемый манипулятор работает следующим образом.
При включении привода начинает вращаться вал 1 с зубчатым колесом 3 и зубчатое колесо 4, вместе с кото- рььм вращается ползун 5. Последний вращает относительно оси 00 коническое зубчатое колесо 7, связанное с винтом 6, н приводит во вращение зубчатые колеса 9 и 10. Ползун 5 через кривошип АА и сферический шарнир приводит в движение шатун 20. Направление вращения указанных элементов показано стрелкойf,
Регулировка радиуса ОА кривошипа осуществляется следующим образом.
При включении рычага 17 посредством отвода 14 тяга 11 и связанная с ней прижимная лапка 12 перемещаются вниз. Лапка 12 прижимает фрикционное коническое колесо 9 к корпусу 2 и останавливает его. Это вызывает перекатывание колеса 7 по неподвижному колесу 9, при этом вращается винт 6. При помощи винта ползун 5
точки С при одновременном его повороте вокруг своей оси. За очет трения в паре 22-23 губки 26 и 27 замкнуты и удерживают транспортируемый
с Предмет. На угле if происходит раскрытие губок 26 и 27 и освобождение транспортируемого изделия. На угле tf, осуществляется возврат губок 26 и 27 в раскрытом положении в исходJO ную точку GO с одновременным дальнейшим поворотом стержня вокруг своей оси. На угле Cf производятся смйжание губок 26 и 27 и захват изделия.
15
Формула изобретения
Стержневой манипулятор, содержащий корпус, стержень, размещенный и связанный с ним кривошип АА отде- 20 направляющей втулке, связанной че- ляются от оси О, т.е. радиус ОА уве- рез шаровую .опору с корпусом, мехаличивается. При достижении требуемой его длины рычаг 17 освобождается и с помощью пружины 15 занимает первоначальное положение, при этом кинематическая связь между фрикцион- ньт коническим колесом 9 и лапкой
12раЭмьгкается.
При включении рычага 19 тяга 11 и связанная с ней прижимная лапка
13перемещаются вверх и благодаря силе трения, возникакядей между колесом 10 и корпусом 2, колесо 10 становится неподвижным. При этом колесо 7 перекатьтается по неподвижному кия надежности и упрощения конструк- колесу 10 в обратном направлении, что вызывает перемещение ползуна 5 к центру вращения, и радиус ОА уменьшается. Пружиной 15 рычаг 19 возвращается в первоначальное положение.
При полном повороте кривошипа образуются характерные углы ср , Cf, qij, ср . При повороте точки А кривошипа на угол Ч, осуществляется выции за счет уменьшения количества поступательных пар, работающих с повышенным износом, шаровая опора стержня размещена по оси кривошипа 40 и центр этой опоры расположен в плоскости, перпендикулярной оси кривощи- па и проходящей через шарнир, соедй- някнций кривошип с шатуном, при этом шатун и стержень образуют пару высдвижение стержня 23 из втулки 22 до 45 шего класса.
точки С при одновременном его повороте вокруг своей оси. За очет трения в паре 22-23 губки 26 и 27 замкнуты и удерживают транспортируемый
Предмет. На угле if происходит раскрытие губок 26 и 27 и освобождение транспортируемого изделия. На угле tf, осуществляется возврат губок 26 и 27 в раскрытом положении в исходную точку GO с одновременным дальнейшим поворотом стержня вокруг своей оси. На угле Cf производятся смйжание губок 26 и 27 и захват изделия.
Формула изобретения
низм поворота стержня вокруг его продольной оси, схват, одна губка которого закреплена на конце стержня,
а другая закреплена на двуплечем
рычаге, mapHiipHo связанном с указанным стержнем, привод с крийошипно- шатунным механизмом, снабженный устройством для регулировки радиуса
кривошипа, причем концы шатуна этого механизма шарнирно связаны соответственно с указанньп ш кривошипом и двуплечим рычагом, отличающийся тем, что, с целью повьшекия надежности и упрощения конструк-
ции за счет уменьшения количества поступательных пар, работающих с повышенным износом, шаровая опора стержня размещена по оси кривошипа и центр этой опоры расположен в плоскости, перпендикулярной оси кривощи- па и проходящей через шарнир, соедй- някнций кривошип с шатуном, при этом шатун и стержень образуют пару
11
Фиё2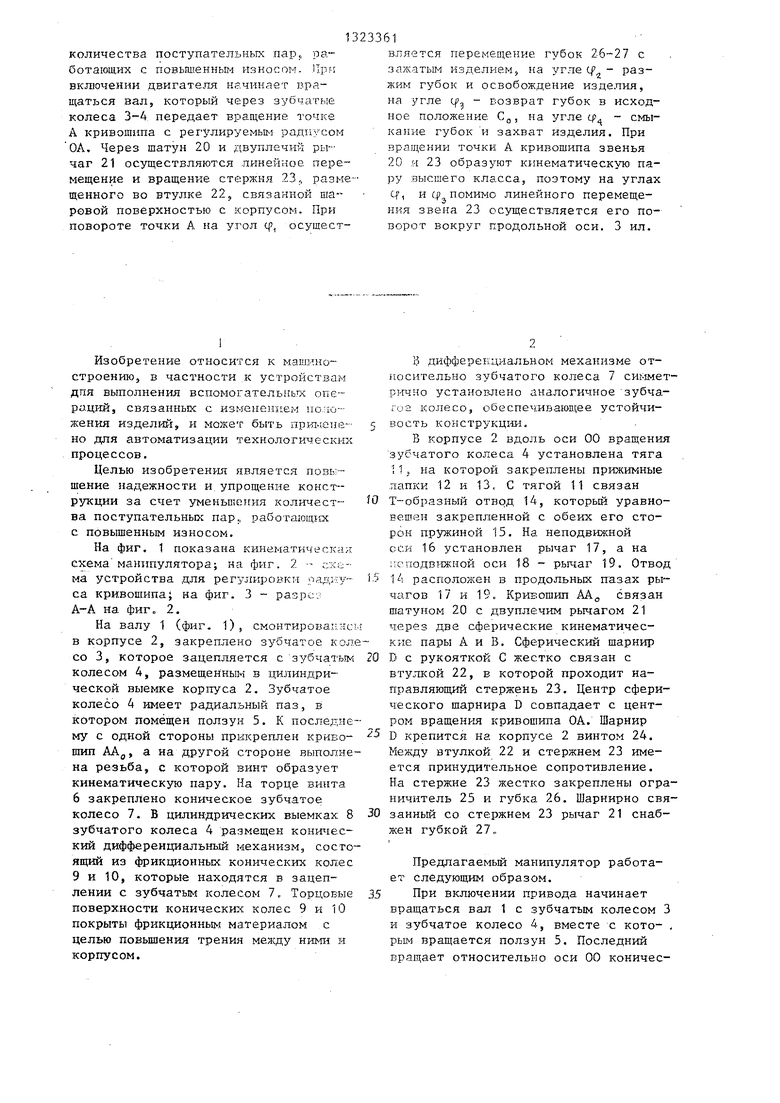
| название | год | авторы | номер документа |
|---|---|---|---|
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Манипулятор | 1982 |
|
SU1065182A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| Схват | 1985 |
|
SU1289679A1 |
| Стержневой манипулятор | 1987 |
|
SU1414621A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Установка для прессования,съема и загрузки изделий на конвейер | 1984 |
|
SU1238969A1 |
| Автомат для изготовления пружинных шайб | 1983 |
|
SU1161217A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
Изобретение относится к области машиностроения, в частности к устройствам для выполнения вспомогательных операций, связанных с изменением положения изделий, и может быть применено для автоматизации технологических процессов. Целью изобретения является повышение надежности и упрощение конструкции за счет уменьшения 7S f&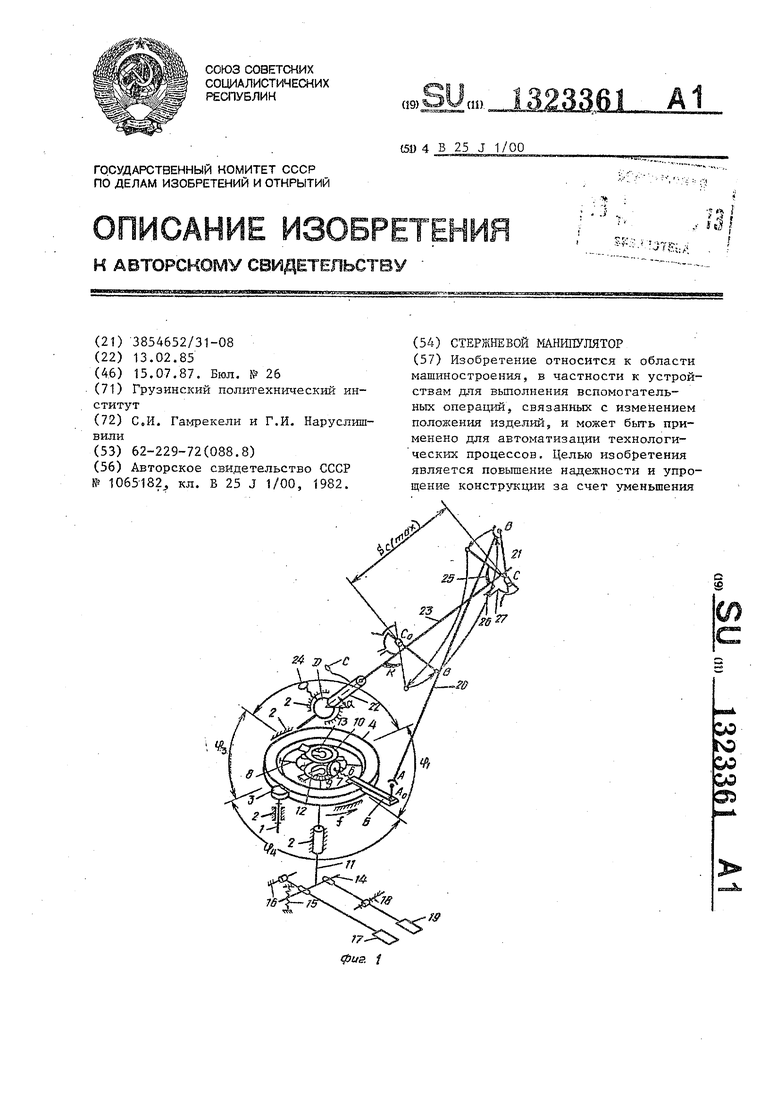
L, 3
т тт м111
Редактор Л.Повхан
Составитель Ю.Вильчинский
Техред А.Кравчук Корректор И.Муска
Заказ 2914/19Тирагк 953Подписное
ВНИИПИ Государственного ютмитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Фкг.З
| Манипулятор | 1982 |
|
SU1065182A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
