Изобретение относится к электротехнике и может быть использовано 3 приводе с вентильным двигателем, исполь эуемом следяще-регулируемых системах, управляемых от цифровых вычислительных устройств.
По основному авт.св. J 674163 известен вентильный электропривод с кодовым датчиком положения на валу синхронного двигателя, формирующий цифровые сигналы, который используются для создания синусоидальных напряжений, предназначенных для формирования методом широтно-импульсной модуляции трехфазных напряжений инвертора, питающего синхронный двигатель С1.
Известный электропривод позволяет получить высокую плавность движения на всех скоростях вращения. Однако продольная составляющая потока статора изменяется с изменение частоты вращения, что приводит к снижению КПД и как следствие, к увелйч:ению установленной мощности двигателя.
Цель изобретения - уменьшение установленной мощности двигателя и повышение КПД.
Поставленная цель достигается тем, что в вентильный электропри вод введены блок формирования, цифровой регистр сдвига, блок суммирования и датчик тока в одну из фаз двигателя, причем выходная шиаа датчика тока соединена через блок формирования с управляющим входом регистра, входные шины которого соединены с выходом кодового датчики, а выходные шины регистра соединены с входными шинами сумматора, выход которого соединен с входными шинами блока управления электропривода.
На чертеже приведена блок-схема вентильного электропривода.
На входную шину блока 1 управления подается разность входного задащего сигнала и сигнала датчика скорое и . Блок 1 включает в себя цифроаналоговые преобразователи 2-4, вь1ходные шины которых соединены с в входнь№ и шинами блока 5 у в задачу которого входит формирование синусоидальных трехфазных сигналов U, UL, и. Эти сигналы подаются на входные шины инвертора б блока управления для получения трехфазного напряжения Уд , U , U, , модулированного по cинycoидaльнo тy закбну ШИМ. Выходные шины блока 6 соединены со статорными обмоткаг.ш синхронного двигателя 7, на залу которого устанавливают кодовый датчик 8 и датчик 9 скорости (тахогенератор постоянного тока). Старший разряд кодового датчика 8 выполнен в
многофазном коде (трехфазном ), а младшие разряды могут быть выполнены в любом цифровом коде. Цифровые шины кодового датчика связаны с первым входом блока 10 суммирования и входными шинами регистра 11, выходные шины которого соединены с вторым входе блока 10 суммирования. Управляющий вход регистра 11 соединен через формирователь 12 с датчиком 13 тока в статорной цепи двигателя. Цифровые шины младших разрядов блока 10 суммирования соединены с цифровыми шинами цифроаналоговых преобразователей 2-4, а цифровые шины старшего разряда с управлякицими шинагли блока 5.
Вентильный электропривод работает следующим образом.
При положительной разности сигналов на входе блока 1 управления на выходных шинах цифроаналоговых преобразователей 2-4 формируются Три отрезка полуволны синусоиды положительной полярности. Это обеспечивает задание опережающего вектора напряжения статора двигателя по отношению к вектору потока ротора Ф . При нулевой частоте вращения нет сдвига между напряжением и и вектором тока Э статора (Ч 0) . Угол между вектором потока ротора напряжением U в этом случае
-определяется взаимным расположением ротора двигателя и датчиком в равнь; м Л/2. Угол между векторами Ф, и Ф
при нулевой скорости также ра,вен . При этом создается электромагнитный момент для вращения двигателя и начинается движение его ротора. При частоте вращения, незначительно отличающейся от нуля, обеспечивается медленное периодическое изменение цифр кодового датчика 8 от нуля до максимального значения. Эти сигналы поступают в блок 10 суммирования, где происходит их сложение с цифровыми сигналами регистра 11. Сигнал с формирователя 12, который совпадает с временем формирования положительной полуволны тока статора, передает цифровые сигналы кодового датчика 8 в блок 10 суммирования. При О показания кодового датчика 8 соответствуют нулевому цифровому сигналу, следовательно, синалы кодового датчика 8 проходят через блок 10 суммирования на вход блока 1 управление без изменения. Очевидно, что угол между векторами Ф,„ и Ф в этом случае останется л/2.
Отрицательная разность на входе блока 1 управления приводит к изменению фазы и на л и созданию другого знака момента двигателя. Работа привода при нулевой скорости и близкой к ней не отличаются от рассмот ренной выше. При значительной частоте вращения двигателя, когда между векторами и и 3{Ф) появляется угол / сигнал с формирователя 12 передает в регистр 11 цифровые показания ко дового датчика 8, соответствующие цифровому коду этого угла. Для одного направления вращения эти показания выдаются в прямом коде, а для другого - в обратном. Цифровые сигналы блока 10 суммирования, которые являются результатам сложения сигналов с кодового датчика 8 80 и регистра 11, осуществляют формиро-, ванне выходных напряжений синхронного двигателя 7. При этом для одного и другого направлений угол между векторами Ф и и , dX, (, что соответствует для любого направления двигателя постоянному углу /2 между векторами потоков Ф и Ф. Таким образ см, осуществляется регулирование угла включения секции двигателя и увеличивается его использование, что позволяет уменьшить его установленную мощность.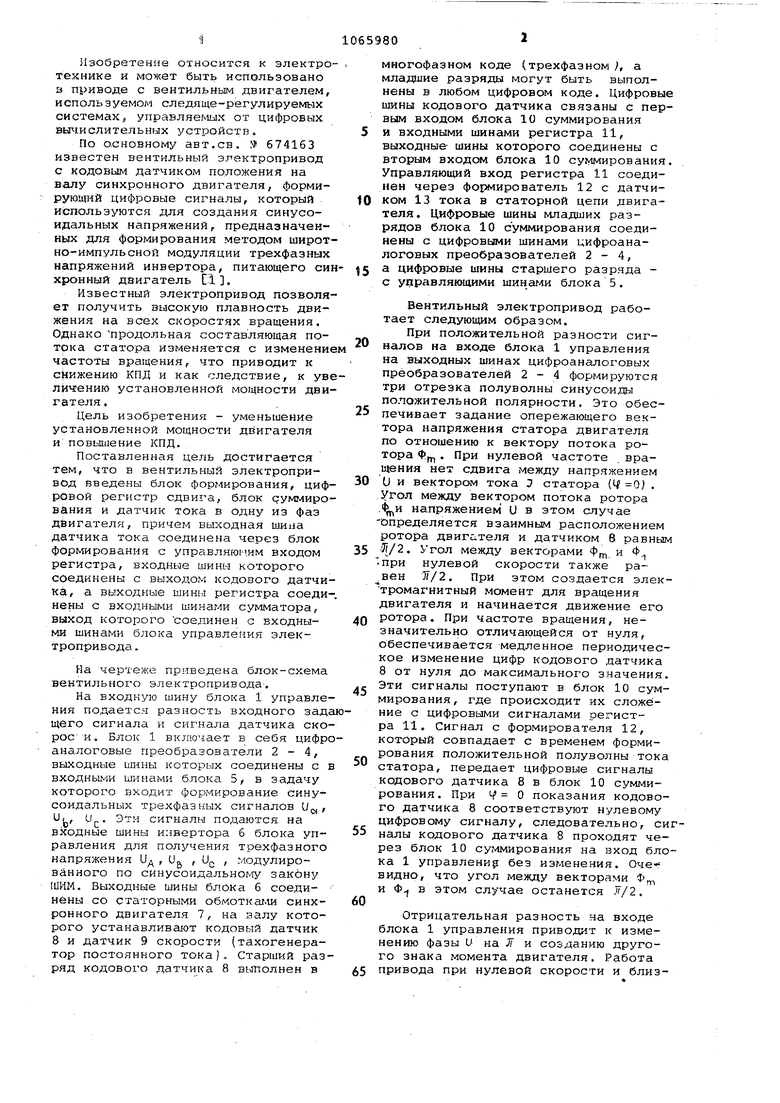
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным двигателем и устройство для его осуществления | 1979 |
|
SU807973A1 |
| Вентильный электропривод | 1974 |
|
SU674163A1 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| Электропривод с вентильным двигателем | 1979 |
|
SU807457A2 |
| Вентильный двигатель | 1980 |
|
SU944472A2 |
| Вентильный электродвигатель | 1979 |
|
SU828930A1 |
| Электропривод | 1979 |
|
SU788326A1 |
| Вентильный электропривод с цифровым управлением | 1988 |
|
SU1582291A1 |
| Вентильный электропривод | 1985 |
|
SU1356171A1 |
| Вентильный электропривод | 1986 |
|
SU1670752A2 |
ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД по авт.св. № 674163, о тл и ч ающ и и с я тем, что, с целью снижения установленной мощности двигателя в приводе и повгоцения КПД в него введе11ы блок формирования, цифровой регистр сдвига, блок суммирования и датчик тока ь одну из фаз двигателя, причем выходная шина тока соединена через блок формирования с управляющим входом регистра, входные шины которого соединены с , выходом кодового датчика, а выходные шины регистра соединены с входными шинами сумматора, выход которого соединен с входными шинами блока управления электропривода. (Л л СП со 00