(54) ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным двигателем и устройство для его осуществления | 1979 |
|
SU807973A1 |
| Вентильный двигатель | 1980 |
|
SU944472A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления трехфазным мостовым инвертором | 1978 |
|
SU752750A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Вентильный электродвигатель | 1979 |
|
SU828930A1 |
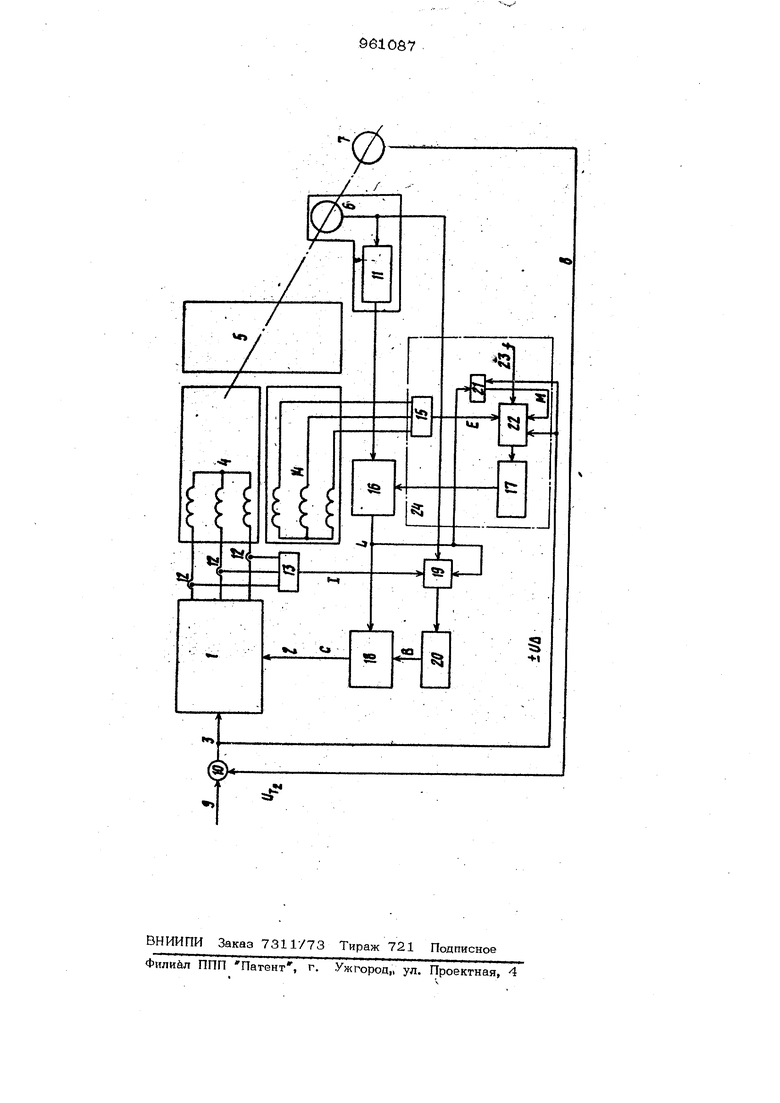
Изобретение относится к электротехл нике, а именно к управлению асинхрон- ным электродвигателем, подключенным к преобразователю частоты, и может использовано в реверсивных сл.адяще-регу лируемых электроприводах с цифровым управлением, которые применяются в различных областях народного хозяйства (электроприводы станков с ЧПУ, автоматических линий, промьпиленных роботов / и т.п.). Известен электропривод переменного тока, содержащий преобразователь частоты, к которому подключен электродвиГа тель, датчик частоты вращения ротора, электромеханический сумматор частот, блок задания частоты скольжения, соединенный с сумматором, датчик тока в фазах электродвигателя, подключенные через блок сравнения к управляющим входам преобразователя l . Недостаток устройства состоит в слож ном вьшолнении блока суммирования и в ;том, что оно не учитьшает изменения температуры ротора, что снижает бысгродейсгвие и точность регулирования. Наиболее близким по технической сущности является электропривод переменного тока, содержащий многофазный асинхронный электродвигатель, инвертор напряжения, выход которого подсоединен к фазам электродвигателя, датчики тока злекгродвигатеяя, тахогенератор на валу электродвигателя, выход которого подключен к первому входу блока сравнения, второй вход которого соединен с блоком задания, а выход - с управлякишм входом величиной напряжения инвертора и с входом блока задання частоты скольжения, выход которого подключен к первому блоку суммирования С2 . Прншшп работ этого устройства заключается в том, что частоту ротора суммируют с час;тотой абсолютного скольжения, при этом резуш/гирукщая частота суммайгора задает частоту перекгпо93V чения ключей имвертора напряжения, а измеренное значение токов фаз в статорной обмотке сравнивают ci заданным значением тока и регулируют угол Вкрючения ключей инвертора преобразователя частоты. Недостаток известного устройства (, состоит в том, что в нем не учитывается изменение температуры ротора при работе электродвигателя. Это приводит к тому, что заранее закладывается такой алгоритм работы, который не использует все возможности данного электродвига теля. В результате снижается быстродействие привода и недоиспользуется электродвигатель по мощности. Цель изобретения - повышение быстродействия н использование электродвигателя. Поставленная цель достигается тем, что в электроприводе переменного тока, содержащем многофазный асинхронный электродвигатель, инвертор напряжения, выход которого подключен к фазам электродвирателя, датчики тока электродвигателя, тахогенератор на валу электродвигателя, выход которого подключен к первому входу блока сравнения, второй вход KoTtjporo соединен с блоком задани а выход - с управляющим входом величиной напряжения, инвертора и с входом блока задания частоты скольжения, выход которого подключен к первому блоку суммирования, введены импульсный датчик положения, первый реверсивный делитель-нсчетчнк, первый формирователь прямоугольных сигналов, трехфазная сиг нальная обмотка, расположенная в поле рассеяния ротора асинхро гаого электродвигателя, второй формирователь прямоугольных сигналов, второй блок суммирования, первая логическая схема сравнения, третий реверсивный делитель счетчик, логический блок задания частоты скол1 жения снабжен вторым реверсивным делителем-счетчиком, логически блоком, второй логической схемой сравнения и блоком задания стабильной частоты, причем выход импульсного датчик положения соединен с первой логической схемой сравнения непосредственно и че рез первый реверсивный делитель-счетчик - с входом первого сумматора, выход которого подсоединен к первой логической схеме сравнения, к входу второго блока суммирования и к первому входу логического блока в блоке задания частоты скольжения, второй вход ло г ическотх блока в блоке задания часто74ты скольжения и один из входов первой логической схемы сравнения образуют входы логического блока задания частоты скольжения, Еггорой, третий и четвертый входы второй логической схемы сравнения соединены соответственно с логическим блоком, с блоком задания стабильной частоты и через второй формирователь прямоугольных сигналов - с трехфазной сигнальной oбv oткoй, а выход второй логической схемы сравнения, соединен с вторым реверсивным делителем-счетчиком, выход котррого является выходом блока задания частоты скольжения, датчики тока электродвигателя через первый формирователь прямоугольных импульсов- соединены с первой логической схемой сравнения, выход которой через третий реверсивный делительсчетчик соединен с вторым блоком суммирования, а выход последнего соединен с управляющим входом управления частотой инвертора. На чертежеПредставлена функциональная блок-схема электропривода переменного тока. Электропривод содержит многофазный инвертор 1 с управляющим входом 2 уп- равления частотой инвертора и управляющим входом 3 величиной напряжения инвертора. К выходным шинам инвертора 1 подключены статорные обмотки 4 аси хронного двигателя. На одном валу с ротором 5 асинхронного двигателя установлень импульсный датчик 6 положения с двумя выходами, служащими для получения сдвинутых, на Ji/2 по фазе сигналов, и тахргенератор 7 постоянного тока. Выходная щина 8 тахргенератора и входная щина 9 блока задания напряжения соединены с входами блока Ю сравнения, выход которого соединен с управляющим входом 3. Выход датчика 6 соединен с входом «тервого реверсивного делителясчетчика 11. В фазах статорной обмотки 4 установлены датчики 12 тока, выходы которых соединены с входами первого формирователя 13 прямоугольных трехфазных сигналов. В поле рассеяния ротора 5 расположена трехфазная сигнальная обмотка 14, соединенная с входами второго формирователя 15 прямоугольных трехфазных сигналов. Выход делителя-счетчика 11 соединен с первым входом первого блока 16 суммирования, второй вход которого соединен с выходом второго реверсивного делителя-счетчика 17. Выход блока 16 соединен с первым входом второго блока 18 суммирсявания и первым входом первой логической схемы 19 сравнения, второй вход котор соединен с выходом датчика б, а трети вход соединен с выходом первогЧ) формирователя 13 прямоугольных трекфаэных сигналов. Выход лот ческой схемы 19 соединен с входом третьего реверси ного делителя-счетчика 20, выход которого соединен с вторым входом блока 18. Выход блока 18 соединен с управля ющим входом 2 управления частотой ин вертора. Вькод блока 16 соединен также с первым входом логического блока 21, второй вход которого соединен с управляющим входом 3 величиной напряжения инвертора и первым входом второй логической схемы 22 сравнения. Выход блока 21 соединен с вторым входом схемы 22, а третий и четвертый входы схемы 22 соединены соответственно с выходом второго формирователя 15 и входнбй шиной 23 блока задания стабипьной частоты. Выход схемы 22 соединен с входом второго реверсивного делителя-счетчика 17. Делитель-счетчик 17, логический блок 21 и схема 22 представляют собой блок 24 задания частоты абсолютного скол11жения. В устройстве выполнены одинаковым реверсивные делители-счетчики 11, 17 и 20, двухвходовые блоки суммирования 16, 18 и формирователи 13, 15 прямоугольных трехфазных сигналов. Поскольку задание опорной системы координат принято в цифровом виде, например в цифровьис сигналах от ООО до 599, емкость делигелей-счегчиковИ 17 и 20 равна 599. Старщйй разряд этих делителей-счетчиков вьшолняется в трехфазном коде, которому за период повторения соответствуют цифры обычного кода от О до 5 (основание разряд и 6). Выполнение старщего разряда в трехфазном коде определяется фазностью асинхронного двигателя. Младшие разряды делителей-счетчиков ВЫПОЛНЯКУГСЯ, например, двухразрядными в пятифаэном коде, которому за период повторения соответствуют цифры обычного цифрового кода от О до 9 (основание разряда п 10). Электропривод работает следующим образом. Рассмотрение работы начнем с нулевой частоты вращения ротора, когда с блока задания на входную щину 9 подается сигнал постоянного напряжения, соответствующий,например, положительному знаку электромагнитного момента. Поскольку двигатель не вращается, напряжение тахогенератора 7 равно нулю и напряжение на управляющем входе 3инвертора напряжения будет совпадать с напряжением на входной шине 9. С импульсного датчика 6 в это время не поступают сигналы и делительсчетчик 11 и на его цифровом выходе сохранится одно из цифровых значений от ООО до 599. В логическом блоке 24 задания частоты абсолютного скольжения вторая лотическая схема 22 сравнения формирует сигнал частоты абсолютного скольжения, который, поступая на вход реверсивного делителя-счетчика 17, вызывает его . переключение и периодическое изменение цифровых сигналов на его выходе от ООО до 599. Это же изменение цифровых сигналов будет происходить на выходе первого блока 16 суммирования. Цифровые выходные сигналы L этого блока, частота изменения которых совпадает в это время с частотой абсолютного скольжения, передаются на выход второго блока 18 суммирования и на управляющий вход 2. Цифровые сигналы С на выходе 2, также изменяющиеся от ООО до 599, формируют на выходных щинах инвертора трехфазные напряжения, по синусоидальному закону широтноимпульсного модулирования. Эти напряжения, поступая на обмотки 4статора асинхронного двигателя, создают в фазах двигателя токи, которые через датчики 12 тока формируют на выходе формирователя 13 прямоугольные сигналы трехфазного кода 3 . Электродвигатель при этом создает электромагнитный момент положительного знака, который начинает увеличивать частоту вращения ротора от нулевого значения. При этом сигналы двухфазного кода tf выхода импульсного датчика 6, поступая на вход первого делителя-счетчика 11, вызывают его переключение в режиме суммирования. Частота изменения- цифровых сигналов L на выходе блока 16, которые продолжают также изменяться от ООО до 599, будет определяться суммой частоты вращения ротора и чаототы абсолютного скольжения. Увеличе ние частоты переключения силовых элементов инвертора при этом приводит к /1О5Голенню угла между вектором тока статора э., и вектором напряжения О., . Поэтому сигналы трехфазного кода с выхода формирователя 13 не бупуг сойпадать с аналогичными сигнапами трехфазного кода старшего разряда блока 16 Сравнение этих сигналов в схеме 19приводит к подаче выходных сигналов импульсного датчика 6 на вход счетчика 20 в режиме суммирования. Цифровые сигналы делителя-счетчика 20в блоке 18 суммирования складьгеаются с цифровыми сигналами, что приводит к изменению угла включения ключей инвертора преобразователя частоты и соответ твенно.развороту вектора нанапряжения в сторону уменьше ния цифров агналов от 599 к ООО, которые харакеризуют опорную систему координат. По ддача сигналов на вход делителя-счетчика 2О происходит до тех пор, пока сигналы трехфазного кода с выхода формирователя 13 не совпадут с сигналами t трехфазно го кода старшего разряда, что соответ твует неизменному положению фаз тока татора в опорной системе координат г стабилизации вектора тока i относигельно этой системы координат. Одновременно в трехфазной сигнально обмотке 14 наводится ЭДС, вектор кото рой Е образует с вектором тока ротора угол J/2 и совпадает по направлению с вектором потокосцепления Ф. Синусоидальные трехфазные сигналы этой ЭДС превращаются на вЬкоде формирователя 15 в сигналы трехфазного кода Е , которые поступают на третий вход второй логической схемы 22 сравнения, на второй вход которой поступают сигналы тре фазного кода М с выхода логического блока 21. Блок 21 формирует при этом заданную фазу потокосцепления ротора . в опорной системе координат. Это происходит следующим образом. По знаку напряжения на управляющем входе 3 к цифровым сигналам Ц добавляется (вычитается) постоянный цнфровой сигнал, например, 469 (130). Сигналы старшего разряда результата сложения в трехфазном коде М подаются на второй вход второго логического блока 22 сравнения, где происходит их сравнение с аналогичными сигналами . При совпадении этих сигналов, что соответствует заданной фазе потокосцепления ротора в опорной системе координат, частота абсолютного скольжения блоком 22 не изменяется. Если разность сигналов трехфазного кода между 6 и Л1 соответствует эквивалентной цифре 5 обыч ного цифрового кода, блок 22 увеличива частоту абсолютного скольжения до тех пор, пока эта разность не станет равна цифре О. При разности между и М , эквивалентной цифре обычного кода , блок 22 уменьшает частоту абсолютного скольжения до тех пор, пока эта разность снова не станет равной цифре О. Этим самьшг стабилизируется фаза потокосцепления ротора в опорной системе коорди нат и, соответственно, фаза угла между током статора и потокосцеплением ротора, что обеспечивает стабильность электромагнитного момента двигателя при воздействии любых дестабилизирующих факторов. По мере увеличения частоты Вращения разность между напряжением на входе бпока задания и напряжением на выходной шине 8 тахегенератора уменьшается и будет стабилизирована на уровне, когда входной сигнал на управляющем входе 3 будет определять заданную частоту вращения. Для смены знака электромагнитного момеш-а и, следовательно, направления вращения изменяется полярность напряжения на входной шине 9, что приводит к смене знака напряжения на управляющем входе 3, смене режима работы реверсивного делителя-счетчика 17 и формировании блоком 21 другой заданной фазы потокосдепления ротора в опорной системе координат. Заданная фаза потокосцепления ротора, соответствующая обратному знаку электромагнитного момента, формируется в этом случае вычитанием (добавлением) из цифровых сигналов L постоянного сигнала - цифры 130 (469). При смене режима работы реверсивного счетчика 17 меняется знай абсолютного скольжения и двигатель переводится в генераторный режим работы. В остальном работа устройства не отличается от описанной и частота абсолютного скольжения, которая в этом режиме также задается блоком 22, будет поддердкиваться на уровне, oбecпeJraвaющeм стабилизацию фазы потокосцеппения ротора в опорной системе координат и .соответственно угла между векторами и Цг при всех дестабилизирующих факто- / pax. . Таким образом, предлагаемый электропривод-наряду со стабилизацией фаз тока статора в опорной системе координат обеспечивает стабилизацию фазы потокосцепления ротора в этой же системе координат, стабилизируя этим самым фазу угла между током статора и пото косцеплением ротора. Это обстоятельств позволяет повысить использование аси хронного двигателя, так как при этом не требуется иметь неоправданные запасы для исключения насьпиешга, и увеличить быстродействие, поскольку изменение заданного угла между соответствующими векторами осуществляется при максимально допустимом изменении частоты абсолютного скольжения. Формула изобретения Электропривод переменного тока, содержащий многофазный асинхронный электродвигатель, инвертор напряжения, выход которого подсоединен к фазам электродвигателя, датчики тока электродвигателя, тахогенератор на валу электродвигателя, выход которого подюпочен к первому входу блока сравнения, второй вход которого соединен с блоком задания, а выход - с управляющим входом величиной напряжения инвертора и с входом блока задания частоты скольжения, выход которого подключен к первому блоку суммирования, отличаю щ и и с я тем, что, с целью повышения быстродействия и использования эле тродвигателя по мощности, введены импульсный датчик положения, первый реверсивный делитель-счетчик, первый фор мирователь прямоугольных сигналов, трехфазная сигнальная обмотка, расположенная в поле рассеяния ротора асинхро ного электродвигателя, второй формирователь прямоугольных .сигналов, трехфазная сигнальная обмсггка, расположенная в поле рассеяния ротора асинхронного электродвигателя, второй формирователь прямоугольных сигналов, второй блок суммирования, первая логическая , схема сравнения, третий реверсивный делитель-счетчик, логический блок задания частоты скольжения снаСокен BTIV рым реверсивным делителем-счетчиком, логическим блоком, второй логической схемой сравнения и блоком задания стабильной частоты, причем выход импульсного датчика положения соединен с первоА логической схемой сравнения непосредственно и через первый реверсивный делитель-счетчик - с входом первого сумматора, выход которого подсоединен к первой логической схеме сра&нения, к входу второго блока суммирования и к первому входу логического блока в бпоке задания частоты скольже- . кия, второй вход логического блока в .блоке задания частоты скольжения в один из Екодов первой логической схемы сравнения образукгг входы логического блока задания частоты скольжения, второй, третий и четвертый входы второй логической схемы сравнения соединены соответственно с логическим блоком, с блоком задания стабильной частоты и через второй форм фователь прямоугош ных сигналов - с трехфазной сигнальной обмоткой, а выход второй логической схемы сравнения соединен с вторым реверсивным делителем-счетчиком, выход которого является выходом блока задания частоты скольжения, датчики тока электродвигателя через первый формирователь прямоуголышк импульсов соединены с первой логической схемой сравнения, выкод которой через третий реверсивный делитель-счетчик соединен с вторым блоком суммирования, а выход последнего соединен с управляк щим входом управления частотой инвертора. Источники информафга, принятые во внимание при экспертизе 1.Бродовский В. Н. и Иванов Е. С. Приводы с частотно-боковым управлением. М., Энергия, 1974, с. 1р-25. 2.Патент ФРГ MJt 563228, кл. Н 02 Р 7/42, 1966.
У . /
-0
