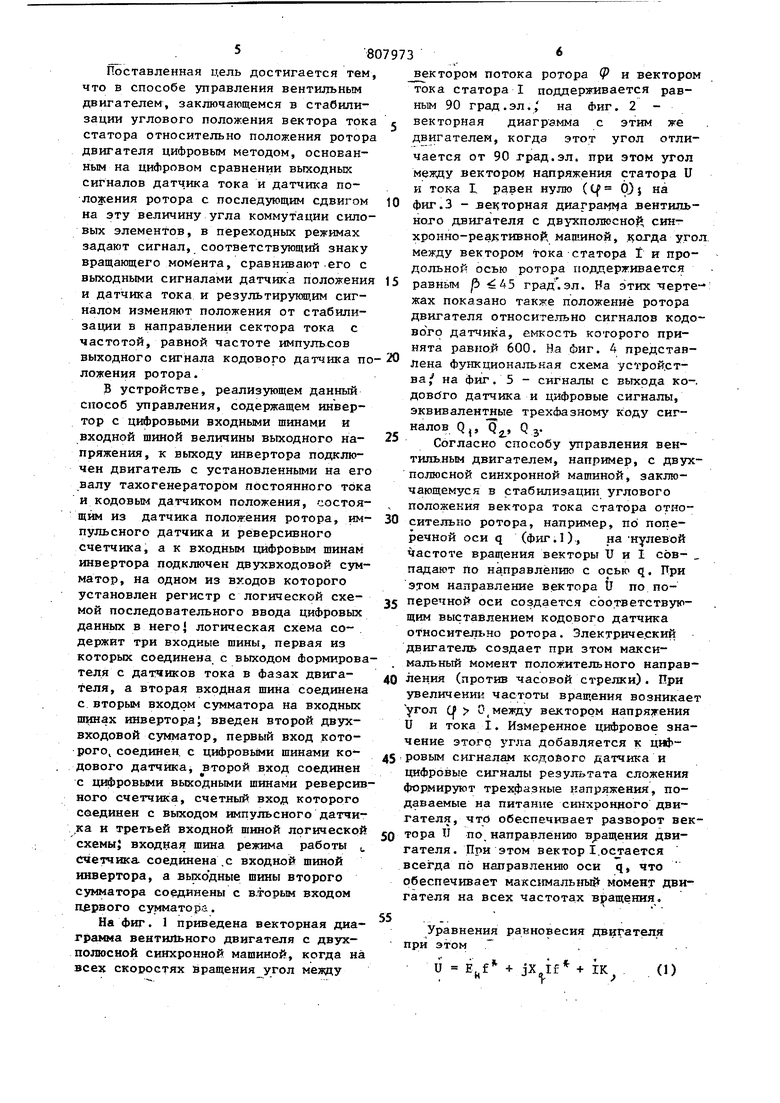
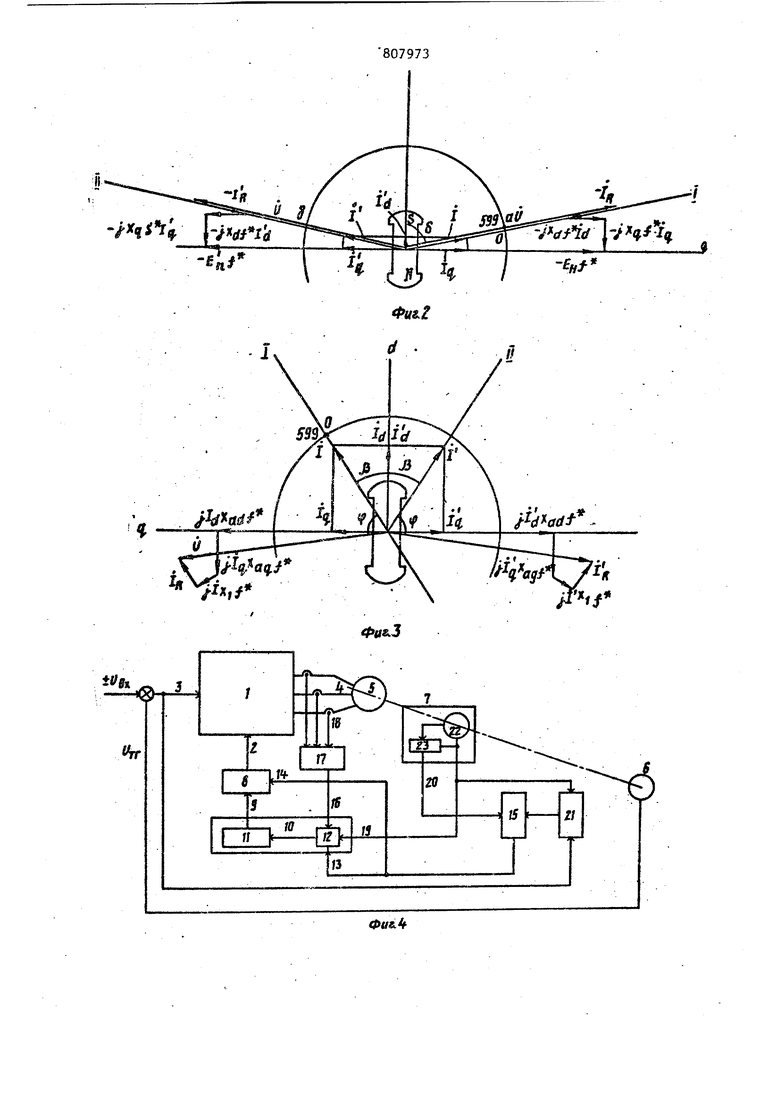
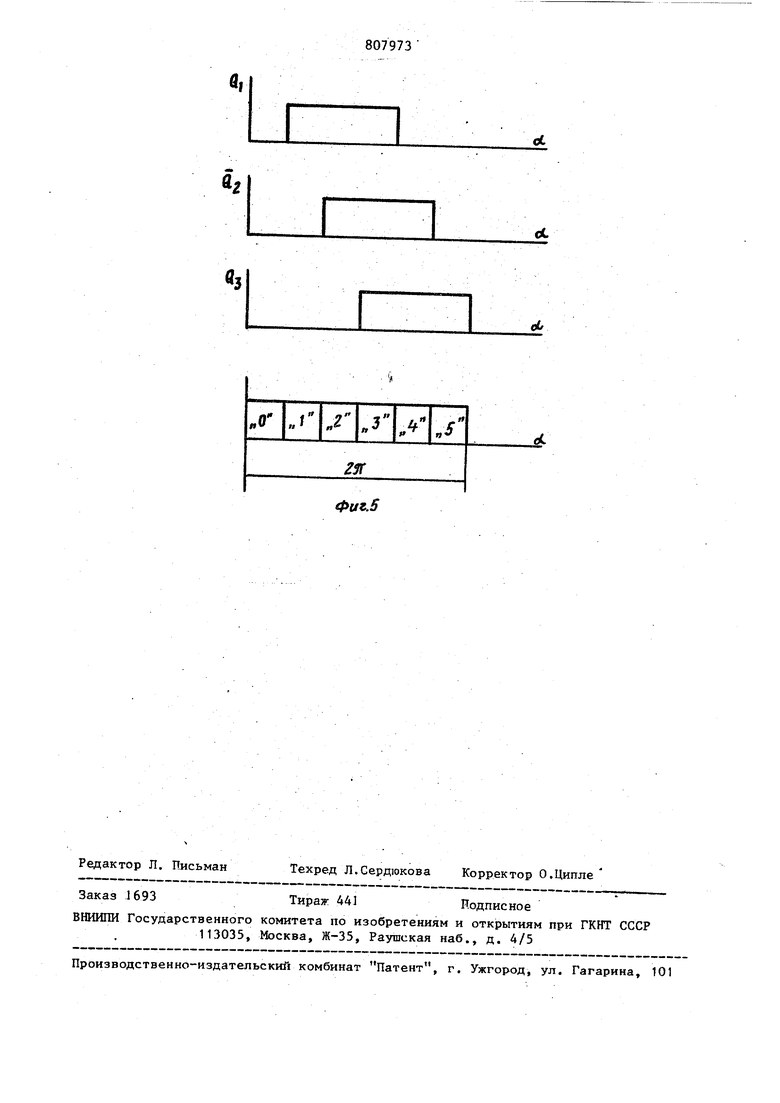
Изобретение относится к управлени электродвигателями, а именно к уп.равлениго вентильным двигателем, вклю чающим многофазную синхронную или синхронно-реактивную машину с расположенным на ее валу кодовым датчиком и инвертором, силовые элементы которого управляются от сигналов этого датчика, и может быть.использовано в реверсивных следяще-регулируемьгх электроприводах с цифровым управлением, которые применяются в различны областях народного хозяйства (элект приводы станков с ЧПУ, промышленных роботов, автоматических линий и т.д. Известны способы управления вентильным двигателем, основанные на различных методах стабилизации угла коммутации силовь х элементов инвертора, регулирования его выходного напряжения и скачкообразном изменении на 180 град эл.угла коммутации рри смене знака электромагнитного м мента . Основным недостатком этих способ управления является невозможность обеспечения высокого КПД синхронног двигателя с магнитоэлектрическим во буждением на всех скоростях вращения, либо невозможность получения одинаковых характеристик привода дл одного и другого направления движения. Еще более низкий КПД получаетс при использовании этих способов. когда в периоде устанавливается син хронно-реактивный двигатель, где к указанным проблемам добавляется сложность его пуска. Необходимо также отметить -неуправляемый характер переходных проце сов в двигателе при этих способах управления, когда при изменении inoлярности входных сигналов управления возникают значительные токи в статорньос обмотках, а наличие продольной составляющей тока статора приводит к размагничиванию ротора, Наиболее близким по технической сущности .к данному изобретению явля ется способ управления многофазным вентильным двигателем основанный на стабилизации углового положения век тора тока статора до поперечной оси ротора двигателя цифровьтм методом, заключающимся в цифровом измерении фазы между вектором тока статора и выходным сигналом кодового датчика с последующим сдвигом на эту величи ну угла коммутации силовых элементов инвертора по направлению вращения двигателя, а также изменением на 180 град.эл.выходного: напряжения инвертора при смене знака электромагнитного момента и направления вращения . Из известных устройств для реализации этого способа управления наиболее .близким по технической суго.ности является устройство управления вентильным двигателем. Это устройство содержит многофазную синхронну и машину, на валу которой расположен датчик положения ротора с вьгходны -{и пшнами, число которых равно числу фаз машины, а также импульсный датчик с двумя выходами, служащими для пол.чення сдвинутых йа и/2, на- фазе сигналов счетчик, вход которого соединен с выходом импульсного датчика, а шина установки в исходное состояние счетчика соединена через блок дифференцирования с выходными шинами датчика положения ротора, и многофазный инвертор с цифровыми входными шинами, где в фазе двигателя установлен датчик тока, выходная шина которого.соединена через блок формирования с управляющим входом регистра, а выходные шины датчика положения ротора и счетчика, а также выходные шины регистра соединены с входными шинами сумматора, выход которого соединен с входньми шинами инвертора, питающего многофазную синхронную машину. Принцип работы этого устройства заключается в том, что цифровые сигналы положения ротора поступают на первый вход сумматора, а на второй его вход подаются цифровые сиг.налы с регистра, куда последовательно вводится цифровой сигнал эквивалентный углу между вектором тока статора и поперечной осью ротора, что обеспечивает разворот относительно ротора цифровых сигналов на выходе сумматора. Цифровые сигналы на выходных шинах сумматора, которые Формируют многофазные выходные напряжения инвертора, при этом обеспечивают неизменность направления вектора тока статора относительно ио11еречной оси ротора двигателя. Цель изобретения - повышение КПД, улучшение качества переходкого процесса, и расширение функциональных возможностей. 58 Поставленная цель достигается тем что в способе управления вентильным двигателем, заключающемся в стабилизации углового положения вектора ток статора относительно положения ротор двигателя цифровым методом, основанным на цифровом сравнении выходных сигналов датчика тока и датчика положения ротора с последующим сдвигом на эту величину угла коммутации сило вых элементов, в переходных режимах задают сигнал, соответствующий знаку вращающего момента, сравнивают его с выходными сигналами датчика положени и датчика тока и результирз кнцим сигналом изменяют положения от стабилизации в направлении сектора тока с частотой, равной частоте импульсов выходного сигнала кодового датчшса п ложения ротора. В устройстве, реализующем данный способ управления, содержащем инвертор с цифровыми входными щинами и входной шиной величины выходного напряжения, к выходу инвертора подключен двигатель с установленными на ег валу тахогенератором постоянного ток и кодовым датчиком положения, состоящим из датчика положения ротора, импульсного датчика и реверсивного счетчика, а к входным цифровым щииам инвертора подключен двухвходовой сумматор, на одном из входов которого установлен регистр с логической схемой последовательного ввода цифровых данных в него{ логическая схема содержит три входные шины, первая из которых соединена с выходом формирова теля с датчиков тока в фазах двигателя, а вторая входная щина соединена с вторым входом сумматора на входных щинах инвертора; введен второй двухвходовой сумматор, первый вход которого, соединен, с цифровь1ми щинами кодового датчика, второй вход соединен с цифровыми выходными шинами реверсив ного счетчика, счетный вход которого соединен с выходом импульсного датчика и третьей входной шиной логической схемы; входная шина режима работы ( счетчика соединена.с входной шиной инвертора, а вырсодные шины второго сумматора соединены с в.торым вкодом первого сумматора. На фиг. 1 приведена векторная диаграмма вентильного двигателя с двухполюсной синхронной машиной, когда на всех скоростях вращения угол между вектором потока ротора (Р и вектором тока статора I поддерживается равным 90 град . эл., на фиг .2 векторная диаграмма с этим же двигателем, когда этот угол отличается от 90 ррад.эл. при этом угол между вектором напряжения статора U и тока Z равен нулю (( 03 j на фиг.З - sejKторная диаграь|ма вентильного двигателя с двухполюсной синхронно-реактивной машиной, .котда угол между вектором тока статора 1 и продольной осью ротора поддерживается равным р 45 град .эл. На этих черте- : жах показано также положение ротора двигателя относительно сигналов кодового датчика, емкость которого принята равио.й 600. На фиг. 4 представлена функциональная схема устройства/ на фиг. 5 - сигналы с выхода ко-. довбго датчика и цифровые сигналы, эквивалентные трехфазном коду сигналов Q, q, Q 3. Согласно способу управления вентиль.ным двигателем, например, с двухПО.ЛЮСНОЙ синхронной машиной, заключающемуся в стабилизации углового положения вектора тока статора относительно ротора, например, по поперечной оси q (фиг.1), нанулевой частоте вращения векторы Ни сов- падают По направлению с осью q. При этом направление вектора tf по поперечной оси создается соответствующим выставлением кодового датчика относител1.но ротора. Электрический двигатель создает при этом максимальный момент положительного направления (против часовой стрелки). При увеличенш частоты вращения возникает угол СР О между велстором напряжения и и тока I. Измеренное цифровое значение этого угла добавляется к ций ровым сигналам кодойого датчика и цифровые сигналы результата сложения формируют трехфазные напряжения, подаваемые на Питание синхронного двигателя, что обеспечивает разворот вектора TI по, направлению вдзащення двигателя. При этом вектор I.ocj-aeTCH всегда по направлению оси q, что обеспечивает максимальный момент двигателя на всех частотах вращения. Уравнения равновесия двигателя при этом . , 78 где Е - ЭДС двигателя на номинальной частоте вращения} - fl - - f/f« относительное значение частоты вращения; R - сопротивление статорной обMOTKKj, - индуктивное, сопротивление машины по поперечной оси, . Qij, сопротивление реакции якоря, X j - сопротивление рассеяния. Для смены знака момента и направления вращения,согласно способу управления, положение оси стабилизаиди тока статора изменяется (от положительного направления до поперечной оси к отрицательному) разворотом ее против .налравления движения ротора двигателя путем последовательного суммирования к цифровым сигналам кодового датчика цифр от 599 до 3000 этого же датчика,, что обеспечивает разворот вектора тока I по отрицатель ному значению оси q и смену знака момента. При этом развороте возникает продольная составляющая тока статора,, которая направлена только на намагни ивание ротора, При смене направления вращения двигателя, когда цифровые сигналы кодового датчика изменяются в обратном направлении (от 599 до 0), цифровое выражение угла Ср будет вьщаваться в коде и его добавление. .к цифровым сигналам кодового датчика обеспечивает также, как при прямом направлении вращения, раз.ворот вектора напряжения U по направлению вращения. При этом вектор I будет всегд направлен по отрицательному значению поперечной оси q, что создает максимальный момент двигателя на всех частотах вращения. Использование способа управления применительно к вентильнрму двигателю с синхронной машиной, когда стабилизация углового положения вектора ток .статора осуществляется не под прямым углом к продольной оси, а под нескол ко больщим (меньщим) углом (фиг.2) н отличается от описанного выше. В это случае разворот оси стабилизации ток статора для прямого направления вращения I к оси для обратного направления вращения II осуществляется со ласно , способу правления путем последовательного суммирования к цифровым сигналам кодового датчика цифр этого же датчика от 599 до значения меньще 300., Согласно способу управления вентильным двигателем, например, с двухполюсной синхронно-реактивной мащиной, заключающимся в стабилизации углового положения вектора тока статора относительно ротора по направлению I под углом А к продольной оси (фиг.З), на нулевой частоте вращения векторы U и I совпадает по направлению и двигатель создает момент в положительном направлении. При увеличении частоты вращения возникает угол cf между векторами U и I. Измеренное цифровое значение этого угла добавляется к цифровым сигналам кодового датчика и цифровые сигналы результата сложения Формируют трехфазные напряжения, подаваемые на питание синхронно-реактивного двигателя,, что обеспечивает разворот вектора U по направлению врап(ения двигателя. При этом вектор I остается всегда по направлению I под углом jb К оси d Уравнение равновесия двигателя при этом и IR Согласно способу управления для смены знака момента и направления движения положение оси стабилизации тока статора, изменяется (поворот оси I по часовой стрелке до положения II) против направления движения двигателя путем последовательного суммирования к цифровым сигналам кодового датчика цифр этого же датчика от 599 до значения, когда вектор тока статора установится по оси II, что обеспечит изменение знака момента и т.д. Все сказанное выше в равной мере относится и к двигателю с линейным движением, а также к двигате,шо с большим числом пар полюсов. Так, например, в макетном образце устройства, реализзтощим данный способ управлен 1я, бьш применен синхронный двигатель с возбуждением от постоянных магнитов при числе пар полюсов 2 р 12. Устройство для управления вентильным двигателем содержит: многофазный инвертор 1 с цифровыми входными щинами 2, шиной 3 управления величиной вь1ходного многофазного напряжения и выходными шинами 4 многофазных напряжений Uj,, UjT, Uc, которые подключены к статорным обмоткам синхронного двигателя 5, на одном валу с дви гателем установлены тахогенератор 6 постоянного тока и кодовый датчик 7 к входным шинам 2 инвертора подключен двухвходовый -сумматор 8, на пер-вом входе 9 которого установлен регистр 1.0, состоящий из реверсивного счетчика 11 и логической схемы 12 последовательного ввода цифровых дан ных в него, первый вход 13 логической схемы 12 соединен с вторым входом 14 сумматора 8 и выходом второго двухвходового сумматора 15, второй вход 16 схемы 12 соединен с выходом Формирователя прямоугольньш сигналов 17 с датчиков тока в Фазах двигателя 18, а третий вход 19 схемы 12 соеди.нен с выходом одного из узлов ходового датчика 7, первый цифровой вход 5 5 соединен с цифровьм выходом 20 кодового датчика 7, второй цифровой вход 15 соединен с цифровыми виходны ми шинами реверсивного счетчика 21, счетный вход которого соединен с выходом импульсного датчика 22, «оторый вместе с реверсивным счетчиком 23 составляет кодовый датчик 7, а вход Задания режима работы счетчика 2J соединен с входной шиной 3 инвертора . На входную шину 3 подается сигнал разности между входным сигналом напряжения и сигналом тахотенера то ра. Вход 9 логической схемы 12 соеди нен с вьтходом импульсного датчика 22 Принцип работы схемы устройства .рассмотрим для случая применения в нем .синхронного двигателя, когда осу ществляется стабилизация углового положения вектора тока статора по поперечной оси ротора. При этом прием, что кодовый датчик положения выдает на электрическом обороте цифровые сигналы от О до 599. Пусть положительная полярность на пряжения на входнойшине 3 инвертора соответствует созданию положительног знака электромагнитного момента двигателя 5 и устанавливает режим работы счетчика 21 на суммирование импульсов датчика 22. При этом счетчик 21 установлен в нулевое положение. На нулевой частоте вращения векторы тока и напряжения совпадают по направлению, апоскольку в регистр 10. установлено нулевое значение, то цифровые сигналы кодового 7 проходят без изменения через сумматоры 15 и 8 на входные цифровые шины 2 инвертора. Эти сигналы формируют на выходных шинах 4 ршвертора трехфазные напряжения ТТд, Б, TJ, питающие синхронный двигатель 5. При этом векторы напряжения и тока статора расположены по поперечной оси ротора и положительный момент синхронного двигателя максимален. При вращении двигателя импульсы с кодового датчика 22 поступают в реверсивный счетчик 21, но его переключения не происходит поскольку для режима суммирования нулевое состояние счетчика осуществляет блокировку на его дальнейшее переключение. Следовательно, в Э.ТОМ цифровые сигналы кодового датчика 7 поступают без.изменения на входные шины 14 сумматора 8, а сигналы старшего разряда Q-l Q-z Оэ кроме этих входных Ш1Ш пост5шают на входные шины 13 логической схемы 12. В 12 производится измерение фазы между трехфазными сигналами Q, Qj, такими же по форме трехфазными сигналами, которые , сформированы из токов фаз в блоке 17. При отставании прямоугольных сигналов тока от сигналов на входной шине 13, что происходит при увеличении частоты вращения, логическая схема пропускает сигналы датчика импульсов 22 на вход счетчика П для суммирования. Появление цифровых сигналов на вь ходных шинах счетчика J.1 приводит к развороту вектора напряжения, i oTopoe формируется -в инверторе Iот цифро:вь1х сигналов 8, по направлению вращения двигателя. Этот разворот производится до тех пор ,цокд прямоугольные трехфазные сигналы тока с выхода 7 не совпадут с прдмоуголь- .ными сигналами Q, Q, Q старшего разряда датчика 7. Этому моменту соответствует установка вектора тока статора строго по поперечной оси ( (Фиг.2). В это время схема 12 запрещает поступление импульсов на счетчик IIив нем хранится число, пропорци-, ональное углу Lf между вектором тока и вектором напряжения U. Если в результате изменения нагрузки либо снижения частоты вращения произойдет уменьшение угла ( , то прямоугольные трехфазные сигналы тока с выхода 17 будет опережать прямоугольные сигналы на входной шине 13 и логическая схема 12 пропустит сигналы датчика 22 импульсов в счетчик 11 для режима вычитания. Это будет продолжаться до тех пор пока вектор тока статора не будет установлен по поперечной оси q. Этот процесс поддержания вектора тока статора по поперечной оси происходит непрерывно. При этом срав нение совпадения сигналов на входных шинах 16 jH 13 может производится как по одной фазе, так и по любому числу фаз двигателя одновременно. Следовательно, при вращении двигателя на любой скорости и любом значении нагрузки сохраняется положение вектора тока статора синхронной машины по поперечной оси, когда момент двигателя максимален, а КПД достаточно высок. При смене знака момента, что соот ветствует изменению полярности на входной шине 3 инвертора, изменяется режим работы счетчцка 21: он переводится в режим вычитания. В этом режиме он вычитает импульсы с выхода импульсного датчика 22. Из нулевого положения он последовательно переходит в положение 599 до 300, когда дальнейшая работа счетчика в режиме вычитания прекращается блокировкой. Появление цифровых сигналов от 599 до 300 на выходных шинах 21 приводит к развороту цифровых сигналов кодового датчика, которые передаются через 15, относительно ротора против направления вращения. Во время разворота этих сигналов происходит изменение оси стабилизации вектора тока статора, относительно которой регистр 1 О поддерживает все время неизменным направление вектора. При цифровом сигнале на выходе 21 соответствующем цифре 300 разворот оси стабилизации прекращается. Этому соответствует изменение сигналов QI, Qg. Q кодового датчика на выходных шинах 15 на инверсные Q,, (Э, 0. При этом двигате1ггь будет развивать максималь.ный момент другого знака. При переводе вектора тока статора от .направления по оси q к направлению по отрицательному значение этой оси появляется продольная составляющая тока статора Ij которая направлена только на намагничивание ротора машины. В результате действия электромагнитного момента другого знака двигатель изменит направление вращения, где работа блок-схемы устройства происходит аналогичным образом. Таким образом, предложенный способ позволяет: 1.Осуществлять стабилизацию вектора тока статора по оси расположенной под любым оптимальным углом к продольной оси ротора, что ведет к сохранению высокого КПД на всех частотах вращйния. 2.Использовать в этом оптимальном режиме не только синхронную машину, но и синхронно-реактивную, которая наиболее проста и техн ологична. 3. В переходных режимах обеспечить только намагничивание ротора синхронного двигателя, что не дает возможности произойти необратимому размагничиванию постоянных магнитов и ведет к улучшению массо-габаритных .показателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный двигатель | 1980 |
|
SU944472A2 |
| Вентильный электропривод | 1974 |
|
SU674163A1 |
| Электропривод с вентильным двигателем | 1979 |
|
SU807457A2 |
| Электропривод | 1979 |
|
SU788326A1 |
| Вентильный электропривод | 1978 |
|
SU1065980A2 |
| Вентильный электродвигатель | 1979 |
|
SU828930A1 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Вентильный электропривод | 1984 |
|
SU1280688A1 |
1. СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, содержащим синхронную машину, заключающийся в стабилизации углового положения вектора тока статора относительно ротора цифровым методом, основанным на цифровом измерении фазы.между вектором тока, положение которого определяют по выходным сигналам датчика тока, и осью стабилизации, угловое положение которой задается выходным сигналом кодового датчик^ на валу двигателя, с последующим сдвигом на эту величину угла коммутации силовых элементов, о тлич ающийс я тем, что, с целью повышения КПД, расширения Функциональных возможностей и улучшения качества переходного процесса, в переходных режимах задают сигнал, соответствующий знаку вращающего мо- '. мент.а, сравнивают его с выходным сигналом кодового датчика положения ротора, и результирующим сигналом изменяют угловое положение оси стабилизации в направлении вектора токас частотой, равной частоте импульсов выходного сигнала кодового датчика положения ротора.2. Устройство для управления вентильным двигателем, содержащее инвертор с цифровь1ми вход- . ными шинами и шиной задания величины выходного -многофазного напряжения, к выходу инвертора подключен многофазный двигатель с установленными, на его валу тахогенератором постоянного тока и кодовым датчиком, состоящим из датчика положения ротора по числу фаз двигателя, импульсного датчика и реверсивного счетчика, а к входным цифровым шинам инвертора подключен двухвходовой сумматор, на одном из входов которого установлен регистр с логической схемой после- • довательиого ввода цифровых данных в него, логическая схема содержит три входные шины, первая из которьтх \ соединена с выходом Формирователя датчиков тока s фазах двигателя, а вторая входная шина соединена с вторым входом сумматора на входных шинах инвертора, отличагощее- с я тем, что, в него введен второй двухвходовой сумматор, первый вход которого соединен с цифровыми шинами кодового датчика, второй вход соединен с цифровыми выходными шинами реверсивного счетчика, счетный вход которого соединен с выходом импульс- ; ного датчика и третьей входной шиной логической схемы, входная шина режима работы счетчика соединена с входной шиной инвертора, а вькодные шины второго сумматора соединены с вторым входом первого сумматора.i(Л00-«ч1;о •чсо
Фа&З
Фut.5
| Цоканов В.В | |||
| Реверсивный бесколлекторный электропривод постоянногсз тока с транзисторным коммутатором | |||
| Известия ВУЗ, ''Электромеханика", 1964, № 7, с | |||
| Коромысла весов | 1921 |
|
SU889A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
