Изобретение относится к электротехнике, в частности к вентильньм двигателям., включающим в себя трехфазную синхронную машину с датчиком положения ротора, сигналы которого управляют силовыми элементами мостового инвертора, питающего эту машину Предложение предназначается для использования в бесконтактных электроприводах различных объектов народного хозяйства (станки с ЧПУ, промышленные роботы, автоматические линии и т.д.).
Известны вентильные электродвигатели, содержащие многофазную синхронную машину, на валу которой расположен датчик.положения ротора с выходными шинами, число которых равно
числу фаз , а также импульсный датчик с двумя выходными шинами, служащими для получения сдвинутых на по фазе сигналов; счетчик, вход которого соединен с выходом импульсного датчика, а шина установки в исходное состояние счетчика через блок ди|)ференцирования соединена с выходными шинами датчика положения ротора; цифровые шины счетчика и датчика положения рГотора соединены с цифровыми входными шинами инвертора, питающего вентильный двигатель. работы этого устройства заключается в том, что соединение .счетчика и выходных шин датчика положения ротора образуют вместе кодовый датчик, цифровые сигналы которого формируют на вькодных шинах инвертора трехфазные напряжения по сииусоидальному закону НИМ, что обеспечивает равномерное вращение вектора напряжения статора и высокую плавность дв1нжения
Недостатком двигателя является сложность конструкции датчика положения ротора.
Наиболее близким по технической сущности к изобретению является устройство, содержащее ротор, статор с обмоткой якоря, секции которой соединены с выходом инвертора, управляющие цепи ключей которого соединены через логическую схему с вторичной обмоттсой датчика положения ротора, выполненного в виде фазорегулятора с числом полюсов, равным числу полюсов ротора, трехфазная первичная обмотка датчика соединена с выходом трехфазного источника повышенной частоты.
Недостаток двигателя заключается в больших пульсациях скорости вращения его ротора.
Целью изобретения является повышение равномерности вращения.
Поставленная цель достигается тем, что логическая схема содержит два формирователя прямоугольных трехфазных, сигналов и вычитающий блок в трехфазном коде, вторичная обмотка фазорегулятора вьтолнена трехфазной, причем.первичная обмотка фазорегулятора соединена с входом первого формирователя, вторичная обмотка соединена с входом второго формирователя, а выходные шины первого и второго формирователей соединены с входами вычитающего блока, выходные шины которого соединены с управляющими цепями ключей инвертора
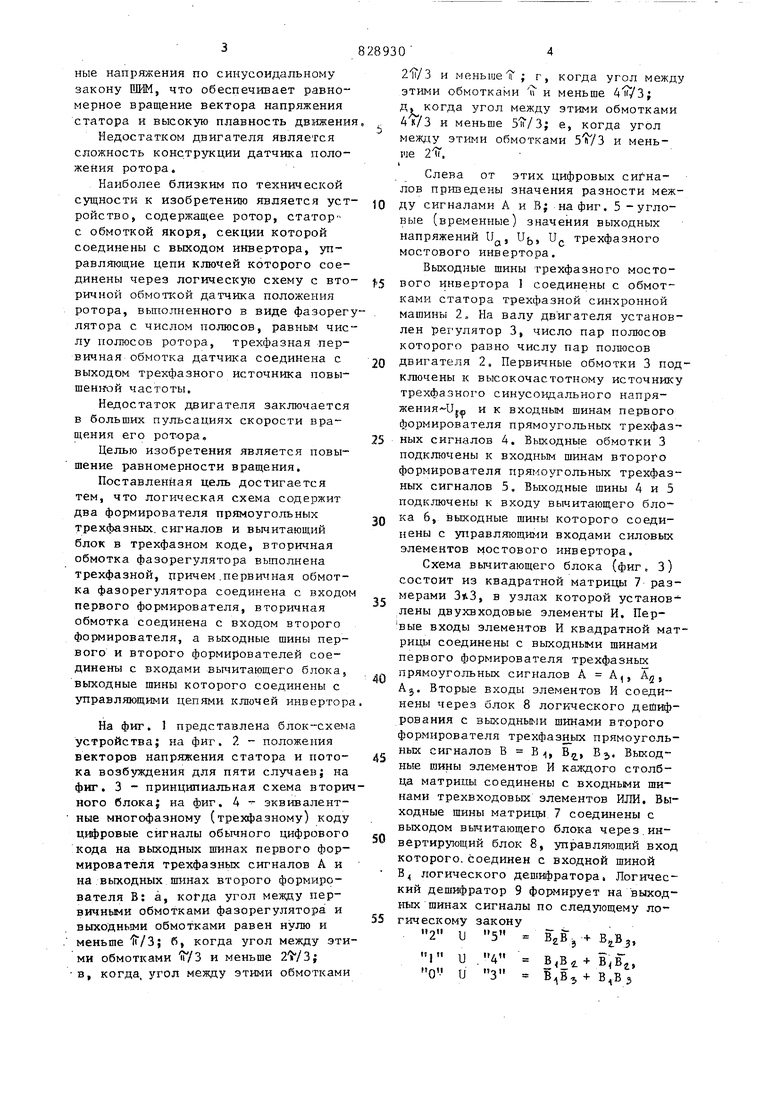
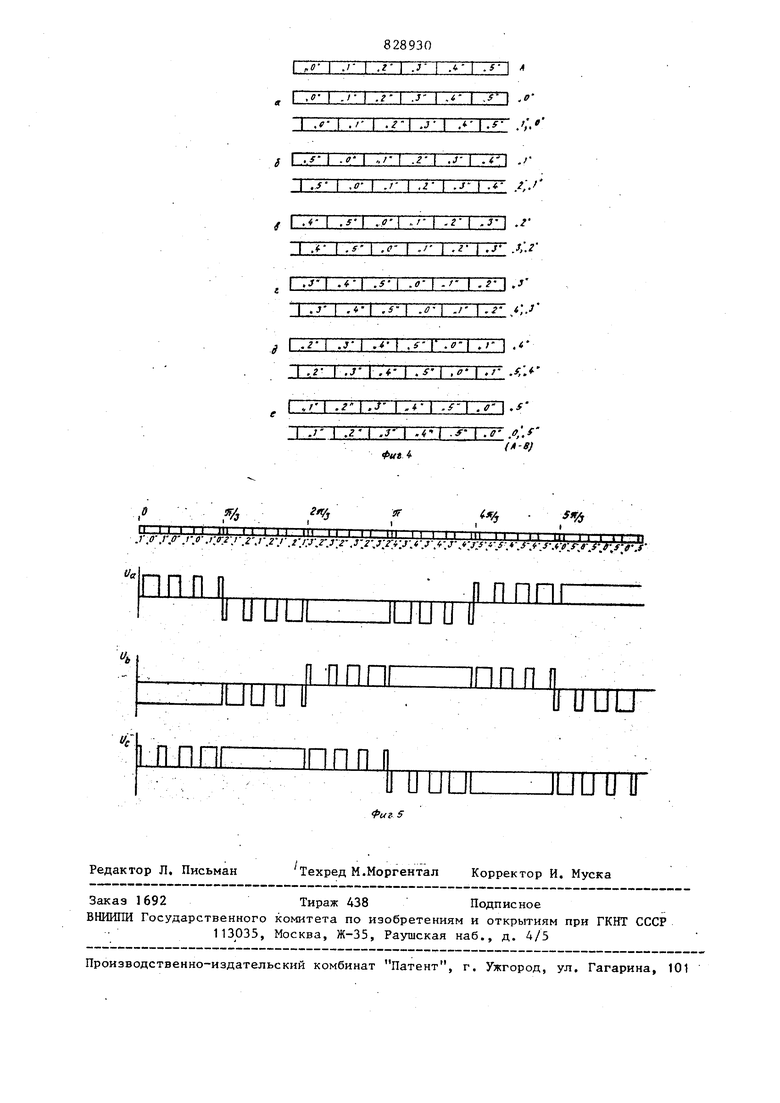
На фиг. 1 представлена блок-схем устройства; на фиг, 2 - положения векторов напряжения статора и потока возбуждения для пяти случаев; на фиг. 3 - принципиальная схема вториного блока; на фиг. 4 - эквивалентные многофазному (трехфазному) коду цифровые сигналы обычного цифрового кода на вьшодных шинах первого формирователя трехфазных сигналов А и на.выходных,шинах второго формирователя В: а, когда угол между первичными обмотками фазорегулятора и выходными обмотками равен нулю и
. меньше 1i/3; б, когда угол между этими обмотками f/S и меньше в, когда, угол между этими обмотками
2и/.3 и меньше IT; г, когда угол между этими обмотками и меньше 4i/3; д, когда угол между зтими обмотками Ак/З и меньше 5li/3; е, когда угол меж;;1у этими обмотками и меньIle 2ir.
Слева от этих цифровых сигналов приведены значения разности межДУ сигналами А и В; на фиг. 5 -угловые (временные) значения выходных напряжений U, Uf,, U трехфазного мостового инвертора,
Вькодные шины трехфазного мостоS вого инвертора 1 соединены с обмотками статора трехфазной синхронной машины 2„ На валу двигателя установлен регулятор 3, число пар полюсов которого равно числу пар полюсов
0 двигателя 2, Первичные обмотки 3 подключены к высокочастотному источнику трехфазного синусоидального напряжения-Uje и к входным шинам первого формирователя прямоугольных трехфаз™
5 ных сигналов 4. Выходные обмотки 3 подключены к входным шинам второго формирователя прямоугольных трехфазных сигналов 5. Выходные шины 4 и 5 подключены к входу вычитающего блоQ ка 6, выходные шины которого соединенЕ 1 с управляющими входами силовых элементов мостового инвертора.
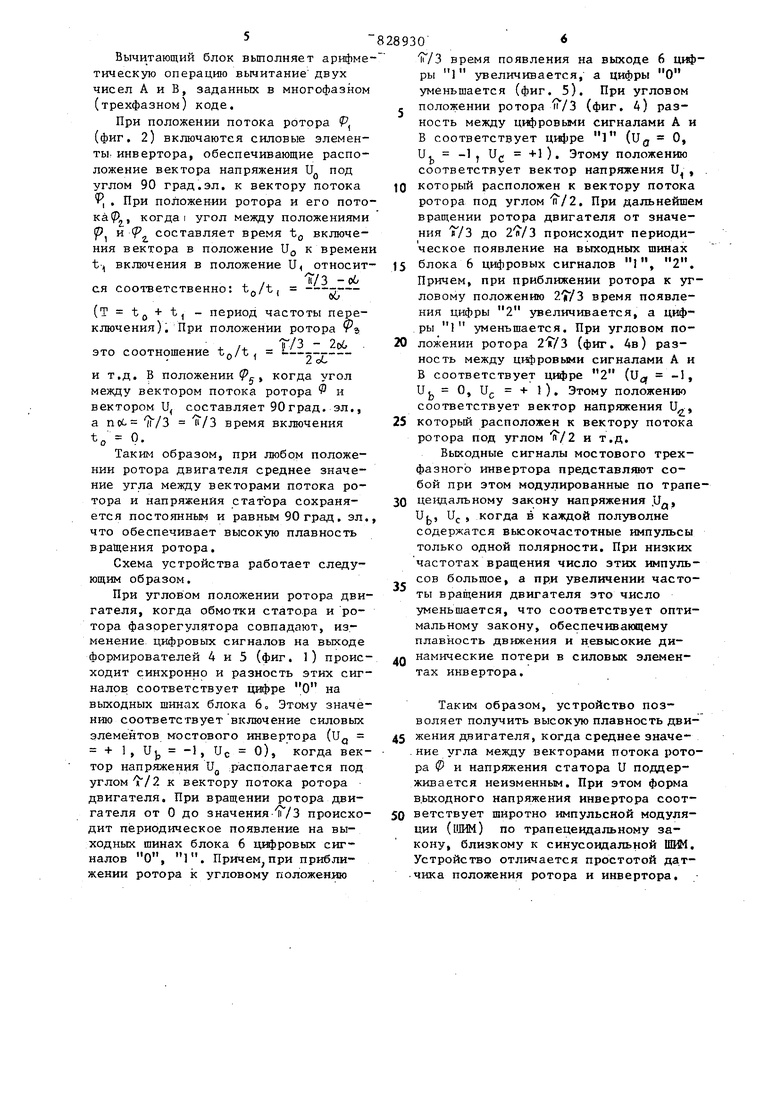
Схема вычитающего блока (фиг, 3) состоит из квадратной матрицы 7 размерами , в узлах которой установлены двухвходовые элементы И. Первые входы элементов И квадратной матрицы соединены с выходными шинами первого формирователя трехфазных
п прямоугольных сигналов А А, A/j, Aj. Вторые входы элементов И соединены через блок 8 лоп-гческого дешифрования с выходными шинами вт.орого формирователя трехфазньпс прямоугольных сигналов В В , В, Б,, ВыходР1ые шины элементов И каждого столбца матрицы соединены с входньии шинами трехвходовых элементов ИЛИ. Выходные шины матрицы 7 соединены с выходом вычитающего блока через.ин0 вертирующий блок 8, управляющий вход
которого, соединен с входной шиной E логического дешифратора, Логический дешифратор 9 формирует на выходных шинах сигналы по следующему ло5 гнческому закону
2 U 5 В.В, 4. В,В.
32D J - DZ.J,
4 ,
1 и О - и 3 + В,Вз Вычитающий блок выполняет арифме тическую операцио вычитание двух чисел А и В, заданных в многофазном (трехфазном) коде. При положении потока ротора P (фиг, 2) включаются силовые элементыг инвертора, обеспечивающие расположение вектора напряжения U. под углом 90 град,эл, к вектору потока fl , При положении ротора и его пото ка (р, когда угол между положениями Р и (Р составляет время t включения вектора в положение U,, к времен t-, включения в положение U относит . 7/3-06 ся соответственно: , п (т t(j + t, - период частоты переключения). При положении ротора тз . это соотношение , 2 и т.д, в положении ipj , когда угол между вектором потока ротора 3 и вектором и, составляет 90град, зл,, а nci. н/З «/3 время включения t, 0. Таким образом, при любом положении ротора двигателя среднее значение угла между векторами потока ротора и напряжения статора сохраняется постоянным и равным 90 град , эл что обеспечивает высокую плавность вращения ротора. Схема устройства работает следующим образом. При угловом положении ротора дви гателя, когда обмотки стато.ра и ротора фазорегулятора совпадают, изменение цифровых сигналов на выходе формирователей 4 и 5 (фиг, 1) проис ходит синхронно и разность этих сиг налов соответствует цифре О на выходных шинах блока 6, Этому значе нию соответствуетвключение силовых элементов мостового инвертора (U b - i с 0) когда век тор напряжения U :располагается под углом к вектору потока ротора двигателя. При вращении ротора двигателя от О до значения происхо дит периодическое появление на выходных шинах блока 6 ц ровых сигналов О, , Причем при приближении ротора к угловому положению Т/3 время появления на выходе 6 цифры 1 увеличивается, а цифры О уменьшается (фиг, 5), При угловом положении ротора 11/3 (фиг. А) разность между цифровыми сигналами А и В соответствует цифре (Ug О, +1), Этому положению -1, Uc соответствует вектор напряжения U , . который расположен к вектору потока ротора под углом п/2. При дальнейшем вращении ротора двигателя от значения Т/З до происходит периодическое появление на выходных шинах блока 6 цифровых сигналов 1, 2. Причем, при приближении ротора к угловому положению 2li/3 время появления цифры 2 увеличивается, а цифры 1 уменьшается. При угловом положении ротора (фиг, Ав) разность между ци|)ровыми сигналами А и В соответствует цифре 2 ( -1, и j О, Uj. + 1 ), Этому положению соответствует вектор напряжения U-, который расположен к вектору потока ротора под утлом /2 и т,д. Выходные сигналы мостового трехфазного инвертора представляют собой при этом модулированные по трапецендальному закону напряжения .U,., Ut, Uf, когда в каждой полуволне содержатся высокочастотные импульсы только одной полярности. При низких частотах вращения число этих импульсов большое, а при увеличении частоты вращения двигателя это число уменьшается, что соответствует оптимальному закону, обеспечивающему плавность движения и невысокие динамические потери в силовых элементах инвертора. Таким образом, устройство позволяет получить высокую плавность движения двигателя, когда среднее значение угла между векторами потока ротора и напряжения статора U поддерживается неизменным. При этом форма в.ыходного напряжения инвертора соответствует широтно импульсной модуляции (иШМ) по трапецеидальному закону, близкому к синусоидальной ШШ, Устройство отличается простотой датчика положения ротора и инвертора. V)
Фиъ.1
С(Л-В) 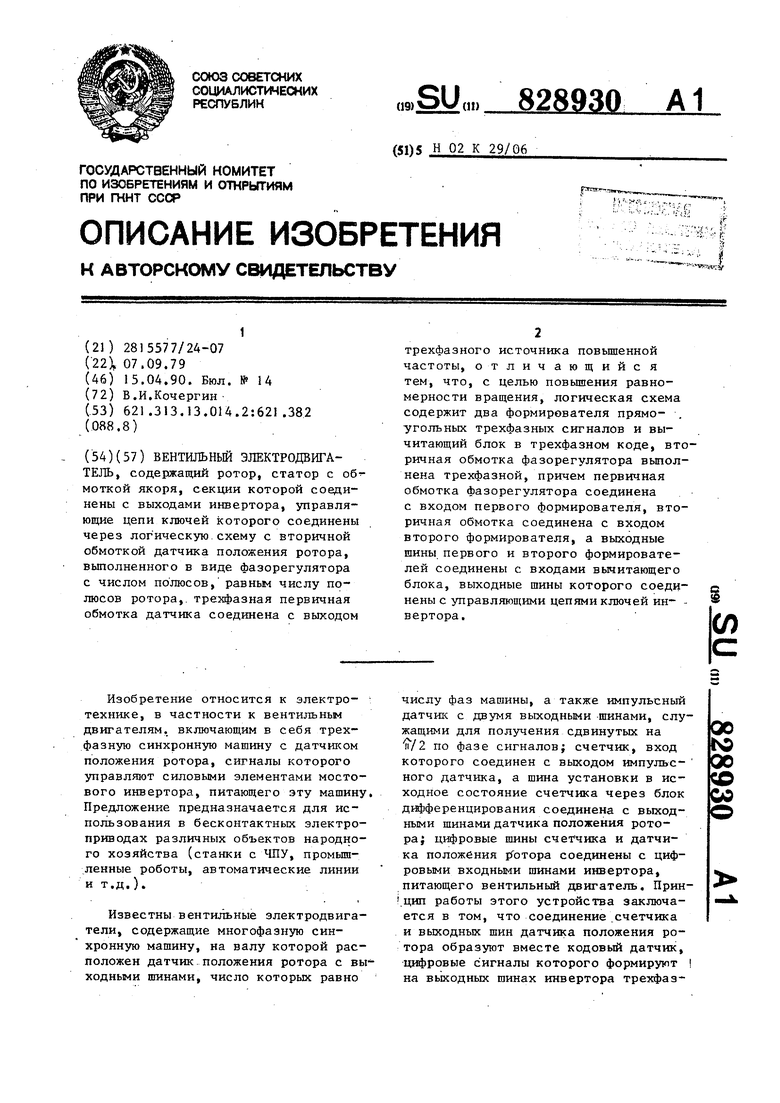
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный двигатель | 1980 |
|
SU944472A2 |
| Способ управления вентильным двигателем и устройство для его осуществления | 1979 |
|
SU807973A1 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| Вентильный электропривод | 1978 |
|
SU1065980A2 |
| Многофазный реверсивный инвертор | 1979 |
|
SU957736A1 |
| Преобразователь постоянного напряжения | 1984 |
|
SU1241383A1 |
| Устройство для управления трехфазным мостовым инвертором | 1977 |
|
SU666627A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ АВТОСАМОСВАЛА | 2021 |
|
RU2757093C1 |
| Электропривод | 1979 |
|
SU788326A1 |
ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий ротор, статор с об^ моткой якоря, секции которой соединены с выходами инвертора, управляющие цепи ключей которого соединены через логическую.схему с вторичной обмоткой датчика положения ротора, выполненного в виде фазорегулятора с числом по'люсов,' равньм числу полюсов ротора,, трехфазная первичная обмотка датчика соединена с выходомтрехфазного источника повышенной частоты, отлич ающийс я тем, что, с целью повышения равномерности вращения, логическая схема содержит два формирователя прямо- . угольных трехфазных сигналов и вычитающий блок в трехфазном коде, вторичная обмотка фазорегулятора выполнена трехфазной, причем первичная обмотка фазорегулятора соединена с входом первого формирователя, вторичная обмотка соединена с входом второго формирователя, а выходные шины первого и второго формирователей соединены с входами вычитающего блока, выходные шины которого соединены с управляющими цепями ключей ин- - вертора.(Л С
Ф.
Фиг. 2
3
ЦГЬ (JFh Ц
1
а
а
S
V
V
451
:а
,
/V,4
KJ
82
8t
Bi
Фиг.З
I I ./ I .г- I .J- I I I - I -г- I I I - I
I .M .-1 .4 .j-1 -r.;.
I .f I . I I .гм .jnrm ./ I .f I .g-1 ./ I .z-1 .j-1.«- /;.
I .-1 .5-1 ..4 ./ I . .
I . t I - n .1 . .-i .g-1 I . .J 1 г I 1 I - ,I .г-1 .J-l .-t .l-.-l I .
I .г- I .J- I .4- I .1 ,. .f,
( /l .г.- I .-1 ./-17.
I ./ I ./ I .3- ., f I .0- A,f
гя/.if
III I J I I I I I HI Mill HI I I I I I III I I I I 1 III I I 1 1 I n . .0 J, ..0 .irzj .,,,3 t -j-ls i. (
/3 fT
