Изобретение относится к вычислительной технике и может быть использовано в системах технического зрения для управления транспортными средствами типа робокаров, передвигающихся по непересекающимся трассам-ориентирам.
Известно устройство для автоматического вождения трактора по светоконтрастной программе (А.С. №872325 СССР, кл. В 60 К 31/00, 1981 г., Бюл. №38), содержащее фотооптический датчик с фотоэлектронным умножителем в качестве светочувствительного элемента, многозвенный делитель напряжения, усилитель, интегратор, регулирующий элемент, блок управления, фотооптический датчик, блок управляемых сопротивлений.
Недостатком этого устройства является низкая надежность в работе, низкое качество обработки изображения.
Наиболее близким к предлагаемому является устройство для автоматического вождения хлопкоуборочной машины (А.С. №1658851 СССР, кл. А 01 В 69/04, 1991 г., Бюл. №24), содержащее источник импульсов и формирователь сигналов вождения, состоящие из оптического блока, формирователя видеосигналов, усилителя-преобразователя, первого сумматора, второго сумматора, делителя, коммутатора, третьего сумматора, четвертого сумматора, пятого сумматора и узла сравнения. Источник импульсов выдает двухуровневый цифровой сигнал, отражающий расположение раскрытых хлопковых коробочек, который поступает в формирователь сигналов вождения, выполненный в виде схемы определения координаты середины междурядья и координат середин левого и правого хлопковых рядов и выдающий по результату обработки полученного сигнала величину и направление отклонения хлопкоуборочной машины от заданного направления движения и величину отклонения рабочих аппаратов хлопкоуборочной машины от хлопкового ряда.
Недостатком этого устройства является низкая точность обработки изображений.
Технической задачей устройства является повышение точности обработки изображений.
Техническая задача решается тем, что в устройство для автоматического вождения хлопкоуборочной машины, содержащее оптический блок, формирователь видеосигналов, первый усилитель-преобразователь, первый сумматор, второй сумматор, делитель, первый узел сравнения, введены линия задержки, тактовый генератор, второй усилитель-преобразователь, логический элемент И-НЕ, логический элемент ИЛИ, первый счетчик, второй счетчик, третий счетчик, второй узел сравнения и третий узел сравнения, причем выход оптического блока подключен ко входу формирователя видеосигнала, первый выход которого подключен ко второму входу первого усилителя-преобразователя, второму входу линии задержки, второму входу второго усилителя-преобразователя, входу делителя, входу тактового генератора, третьему входу первого сумматора, третьему входу второго сумматора, второму входу первого узла сравнения, второму входу второго узла сравнения, второму входу третьего узла сравнения, а второй выход формирователя видеосигнала подключен к первому входу линии задержки и к первому входу первого усилителя-преобразователя, чей выход соединен со вторым входом логического элемента ИЛИ, со вторым входом логического элемента И-НЕ и с первым входом первого счетчика, выход линии задержки подключен к первому входу второго усилителя-преобразователя, выход которого соединен с первым входом логического элемента И-НЕ и первым входом логического элемента ИЛИ, чей выход соединен с первым входом третьего счетчика, второй вход которого подключен к выходу делителя, к которому также подключен второй вход первого счетчика и второй вход второго счетчика, чей первый вход соединен с выходом логического элемента И-НЕ, а третий вход соединен с выходом тактового генератора, который также подключен к третьему входу первого счетчика и третьему входу третьего счетчика, выход которого подключен ко второму входу второго сумматора, чей первый вход соединен с выходом первого счетчика, который также подключен к первому входу первого узла сравнения и первому входу первого сумматора, чей второй вход соединен с выходом второго счетчика, а выход подключен к первому входу второго узла сравнения, выход второго сумматора подключен к первому входу третьего узла сравнения.
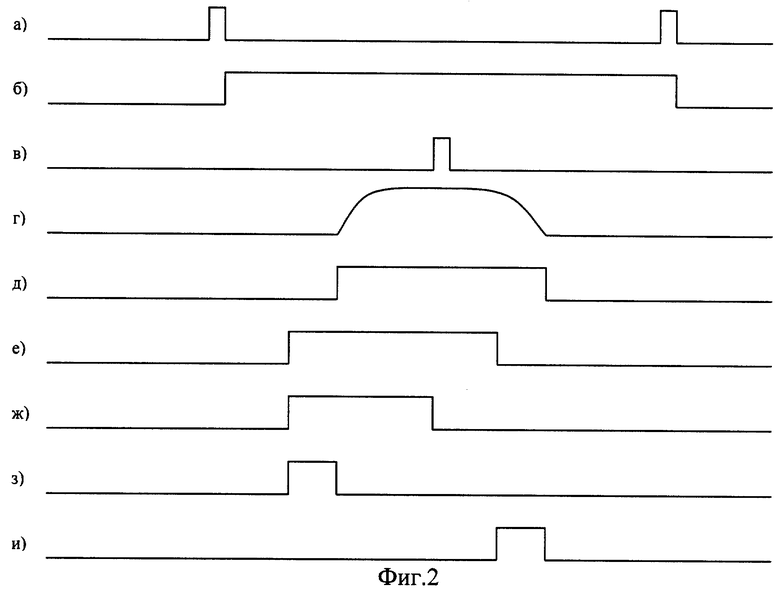
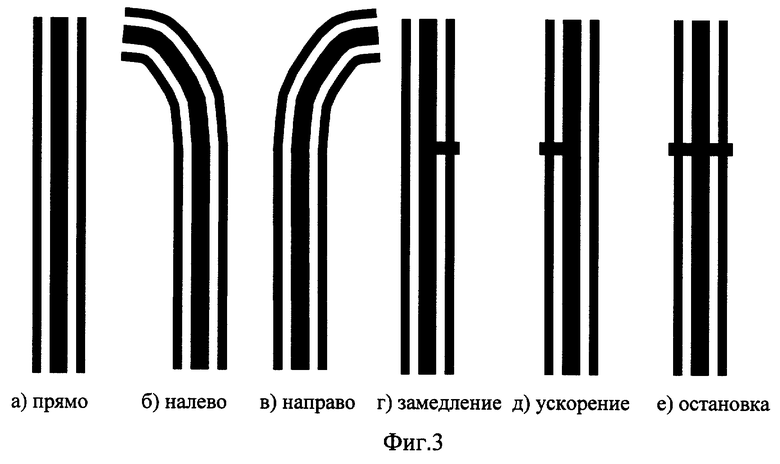
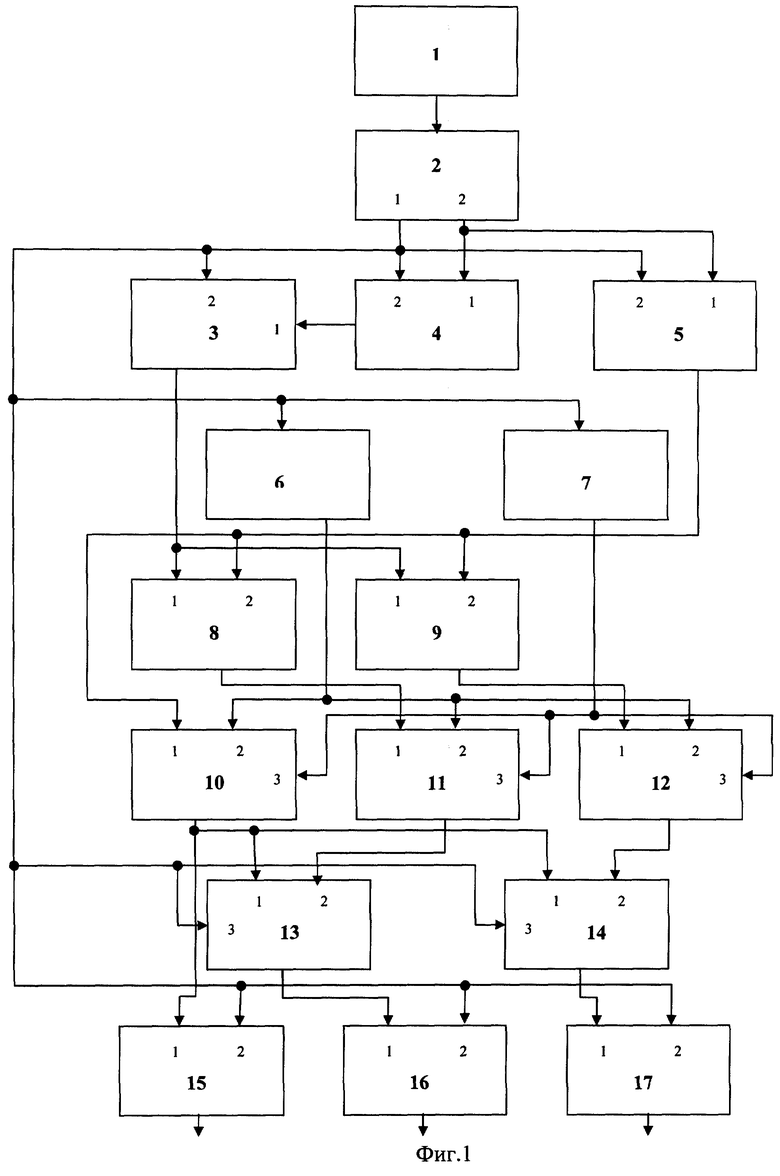
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема предлагаемого устройства, на фиг.2 представлены диаграммы работы устройства, а на фиг.3 показаны типичные виды траектории движения устройства.
Устройство для управления движением транспортного робота содержит оптический блок 1, формирователь видеосигнала 2, линию задержки 4, первый усилитель-преобразователь 5, второй усилитель-преобразователь 3, тактовый генератор 7, делитель 6, логический элемент И-НЕ 8, логический элемент ИЛИ 9, первый счетчик 10, второй счетчик 11, третий счетчик 12, первый сумматор 13, второй сумматор 14, первый узел сравнения 15, второй узел сравнения 16, третий узел сравнения 17, причем выход оптического блока 1 подключен ко входу формирователя видеосигнала 2, первый выход которого подключен ко второму входу первого усилителя-преобразователя 5, второму входу линии задержки 4, второму входу второго усилителя-преобразователя 3, входу делителя 6, входу тактового генератора 7, третьему входу первого сумматора 13, третьему входу второго сумматора 14, второму входу первого узла сравнения 15, второму входу второго узла сравнения 16, второму входу третьего узла сравнения 17, а второй выход формирователя видеосигнала 2 подключен к первому входу линии задержки 4 и к первому входу первого усилителя-преобразователя 5, чей выход соединен со вторым входом логического элемента ИЛИ 9, со вторым входом логического элемента И-НЕ 8 и с первым входом первого счетчика 10, выход линии задержки 4 подключен к первому входу второго усилителя-преобразователя 3, выход которого соединен с первым входом логического элемента И-НЕ 8 и первым входом логического элемента ИЛИ 9, чей выход соединен с первым входом третьего счетчика 12, второй вход которого подключен к выходу делителя 6, к которому также подключен второй вход первого счетчика 10 и второй вход второго счетчика 11, чей первый вход соединен с выходом логического элемента И-НЕ 8, а третий вход соединен с выходом тактового генератора 7, который также подключен к третьему входу первого счетчика 10 и третьему входу третьего счетчика 12, выход которого подключен ко второму входу второго сумматора 14, чей первый вход соединен с выходом первого счетчика 10, который также подключен к первому входу первого узла сравнения 15 и первому входу первого сумматора 13, чей второй вход соединен с выходом второго счетчика 11, а выход подключен к первому входу второго узла сравнения 16, выход второго сумматора 14 подключен к первому входу третьего узла сравнения 17.
При установке устройства на транспортном роботе чувствительная область формирователя видеосигнала 2, в качестве которого может быть использован линейный фоточувствительный прибор с зарядовой связью, располагается перпендикулярно продольной оси транспортного робота и направлению движения транспортного робота.
Устройство установлено так, что на чувствительный слой формирователя видеосигнала 2 проецируется линия сканирования, расположенная перпендикулярно направлению движения транспортного робота и длиной D (ширина светоконтрастной трассы на плоскости по которой движется робот). При движении транспортного робота линия сканирования перемещается, т.е. устройством сканируется участок трассы размером D*i.
Устройство работает следующим образом.
Видеосигнал от оптического блока 1 поступает на формирователь видеосигнала 2. Формирователь видеосигнала 2 одновременно формирует на первом выходе стробирующий сигнал STR (фиг 2.а) и на втором выходе последовательный сигнал, отражающий картину, полученную на входе от оптического блока 1 (фиг 2.г), который затем подается на первый вход линии задержки 4 и первый вход первого усилителя-преобразователя 5. Линия задержки 4 задерживает сигнал, полученный с формирователя видеосигнала 2, на один такт сигнала STR, после чего выдает его на первый вход второго усилителя-преобразователя 3. Таким образом, каждые два такта сигнала STR на выходе первого усилителя-преобразователя 5 получим оцифрованный сигнал соответствующий текущей картине на входе оптического блока 1 (фиг 2.д), а на выходе второго усилителя-преобразователя 3 - оцифрованный сигнал, соответствующий картине на входе оптического блока 1 один такт сигнала STR назад (фиг 2.е). По сигналу STR производится сброс/запуск тактового генератора 7 (фиг 2.6), импульсные сигналы с выхода которого поступают на счетные входы первого счетчика 10, второго счетчика 11 и третьего счетчика 12. Первый счетчик 10 считает количество импульсов тактового генератора 7, прошедших с переднего фронта сигнала на выходе первого усилителя-преобразователя 5 и до середины кадра (фиг 2.ж), отсечку которой обеспечивает делитель 6 (фиг.2.в). Таким образом, на выходе первого счетчика 10 получим текущую координату Оср середины светоотражающей полосы, т.е количество импульсов тактового генератора от левого края светоотражающей полосы и до середины строки. Зная заданную координату середины светоотражающей полосы Озад, на первом узле сравнения 15 вычисляется величина отклонения транспортного робота от заданной траектории по формуле Ооткл=Озад-Оср. На выходе первого узла сравнения 15 получим управляющий сигнал, соответствующий величине рассогласования со своим знаком. Отработкой величины Ооткл исполнительный механизм возвращает транспортный робот к положению, когда Ооткл=0. Второй счетчик 11 вычисляет величину отклонения устройства за один такт от координаты левого края светоконтрастной полосы (фиг.2.з). Эта задача решается тем, что на разрешающий вход первого счетчика 11 подается сигнал с выхода логического элемента И-НЕ 8, на входы которого подаются сигналы с выхода первого усилителя-преобразователя 5 (фиг 2.д) и выхода второго усилителя-преобразователя 3 (фиг 2.е). Второй счетчик 11 работает в промежутке времени до середины кадра, отсечку которого обеспечивает делитель 6 (фиг 2.в). Таким образом, на выходе второго счетчика получим величину рассогласования Ол с момента, когда произошел переход уровня одного из сигналов с выходов усилителей-преобразователей 3 или 5 и до момента, когда оба сигнала с выходов усилителей преобразователей 3 или 5 перешли на одинаковый уровень. Третий счетчик 12 работает промежуток времени с момента, когда произошел переход уровня одного из сигналов с выходов усилителей-преобразователей и до момента, когда оба сигнала с выходов усилителей преобразователей перешли на одинаковый уровень (фиг.2.и). Аналогичным образом третий счетчик 12 подсчитывает величину рассогласования правой координаты светоконтрастной полосы Оп, при этом третий счетчик 12 работает от середины до конца кадра. Разрешающий сигнал для третьего счетчика 12 подается с выхода логического элемента ИЛИ 9. Первый сумматор 13 вычисляет сумму координаты заданной середины Озад и величины рассогласования левой координаты Ол, с соответствующим знаком Олк=Озад-Оп. Второй сумматор 14 вычисляет сумму заданной координаты середины Озад и величины рассогласования правой координаты Оп, с соответствующим знаком Опк=Озад-Оп. Второй узел сравнения 16 сравнивает величину, полученную на первом сумматоре 13, с заданной величиной управляющего отклонения Оупр. Если эти величины равны, на выходе второго узла сравнения 16 формируется управляющий сигнал - уменьшение линейной скорости на заданную величину. Третий узел сравнения 17 сравнивает величину, полученную на втором сумматоре 14, с заданной величиной управляющего отклонения Оупр. Если эти величины равны, на выходе третьего узла сравнения 17 формируется управляющий сигнал - увеличение линейной скорости на заданную величину. В том случае, если управляющие сигналы выставлены на выходах и второго узла сравнения 16, и третьего узла сравнения 17, исполнительный механизм выполняет команду “Стоп”. Таким образом, на выходе первого узла сравнения 15 получим величину рассогласования между заданной координатой центра светоотражающей полосы и реально полученной координатой, на выходе второго узла сравнения 16 - управляющий сигнал “увеличение линейной скорости”, на выходе третьего узла сравнения 17 - управляющий сигнал “уменьшение линейной скорости”. В том случае, если на выходе второго узла сравнения 16 или на выходе третьего узла сравнения 17 присутствует управляющий сигнал, исполнительный механизм не учитывает рассогласование, полученное на выходе первого узла сравнения 15.
Таким образом, предложенное решение позволяет существенно повысить точность обработки изображений за счет введения в устройство линии задержки, тактового генератора, второго усилителя-преобразователя, логического элемента И-НЕ, логического элемента ИЛИ, первого счетчика, второго счетчика, третьего счетчика, второго узла сравнения, третьего узла сравнения и использования эффективного алгоритма нахождения текущих координат левого края светоконтрастной полосы, правого края светоконтрастной полосы и ее середины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2255853C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2263021C1 |
| Устройство для автоматического вождения хлопкоуборочной машины | 1988 |
|
SU1542443A1 |
| Устройство для автоматического вождения хлопкоуборочной машины | 1989 |
|
SU1681749A1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |
| Устройство для считывания изображений | 1986 |
|
SU1383417A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1987 |
|
SU1564685A1 |
| Устройство для кодирования видеосигнала | 1987 |
|
SU1474701A2 |
Изобретение относится к вычислительной технике и может быть использовано в системах технического зрения для управления транспортными средствами типа робокаров. Видеосигнал от оптического блока поступает на формирователь видеосигнала, который формирует стробирующий и последовательный сигналы. Линия задержки задерживает стробирующий сигнал на один такт. После чего сигналы проходят усилители-преобразователи, на выходе которых получаются оцифрованные сигналы, соответствующие картине на входе оптического блока. При прохождении сигналов через счетчики производится подсчет координат левого и правого края светоконтрастной полосы, далее в узлах сравнения производится сравнение полученных координат с заданными. Изобретение позволяет повысить точность обработки изображения. 3 ил.
Устройство для управления движением транспортного робота, содержащее оптический блок, формирователь видеосигналов, первый усилитель-преобразователь, первый сумматор, второй сумматор, делитель, первый узел сравнения, отличающееся тем, что дополнительно введены линия задержки, тактовый генератор, второй усилитель-преобразователь, логический элемент И-НЕ, логический элемент ИЛИ, первый счетчик, второй счетчик, третий счетчик, второй узел сравнения и третий узел сравнения, причем выход оптического блока подключен ко входу формирователя видеосигнала, первый выход которого подключен ко второму входу первого усилителя-преобразователя, второму входу линии задержки, второму входу второго усилителя-преобразователя, входу делителя, входу тактового генератора, третьему входу первого сумматора, третьему входу второго сумматора, второму входу первого узла сравнения, второму входу второго узла сравнения, второму входу третьего узла сравнения, а второй выход формирователя видеосигнала подключен к первому входу линии задержки и к первому входу первого усилителя-преобразователя, чей выход соединен со вторым входом логического элемента ИЛИ, со вторым входом логического элемента И-НЕ и с первым входом первого счетчика, выход линии задержки подключен к первому входу второго усилителя-преобразователя, выход которого соединен с первым входом логического элемента И-НЕ и первым входом логического элемента ИЛИ, чей выход соединен с первым входом третьего счетчика, второй вход которого подключен к выходу делителя, к которому также подключен второй вход первого счетчика и второй вход второго счетчика, чей первый вход соединен с выходом логического элемента И-НЕ, а третий вход соединен с выходом тактового генератора, который также подключен к третьему входу первого счетчика и третьему входу третьего счетчика, выход которого подключен ко второму входу второго сумматора, чей первый вход соединен с выходом первого счетчика, который также подключен к первому входу первого узла сравнения и первому входу первого сумматора, чей второй вход соединен с выходом второго счетчика, а выход подключен к первому входу второго узла сравнения, выход второго сумматора подключен к первому входу третьего узла сравнения.
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Система управления транспортным средством | 1984 |
|
SU1242919A1 |
| Система управления движением транспортного средства | 1984 |
|
SU1228081A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для управления подвижным роботом | 1985 |
|
SU1344595A1 |

