Изобретение относится к области металлургии и машиностроению и может быть использовано для управления положением нажимных винтов прокатных станов.
Целью изобретения является повышение быстродействия и уменьшение колебательности системы.
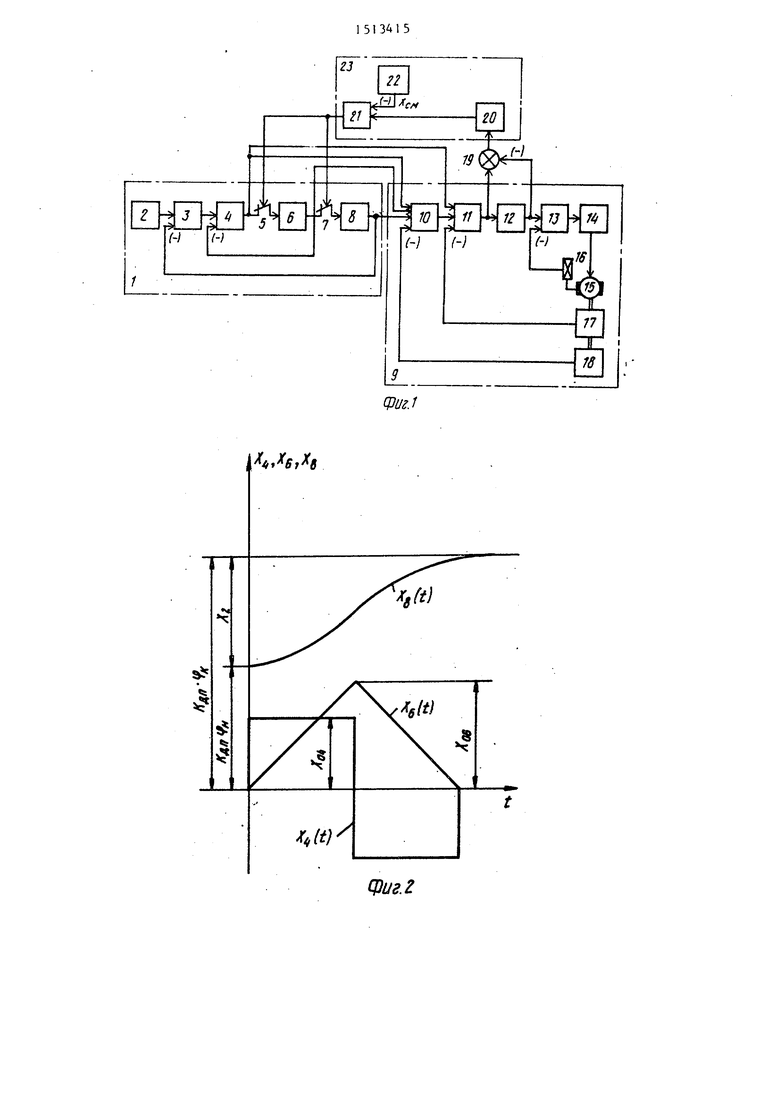
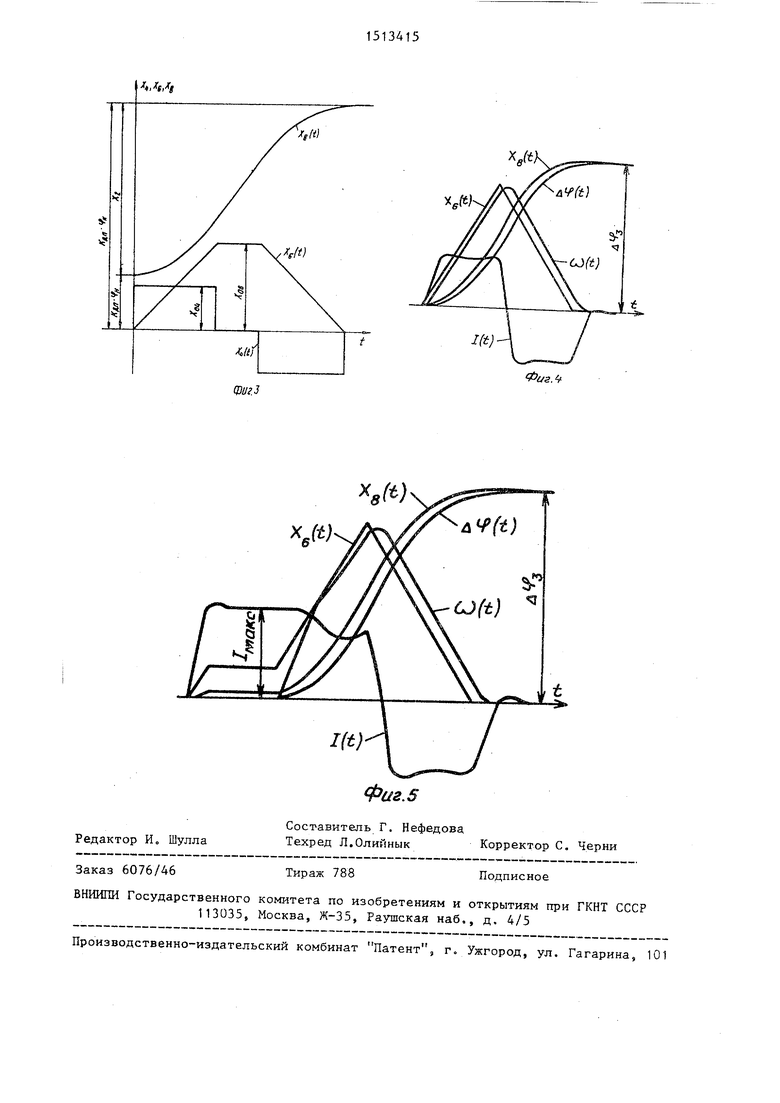
На фиг. 1 представлена блок-схема системы; на фиг. 2 и 3 - диаграммы
10
31513415
изменения сигналов задающего устройства при работе системы по соответственно треугольной и трапецеидальной тахограммам; на фиг. 4 и 5 - графики переходных процессов в системе при отработке заданного перемещения при отсутствии токоограни- чения и его наличии соответственно.
Система содержит задающее устройство 1, источник 2 входного сигнала, нелинейный блок 3, компаратор 4, первый ключ 5, первый интегратор 6, второй ключ 7, второй интегратор 8,
:контур 9 регулирования положения, регулятор 10 положения, регулятор 11 скорости, усилитель-ограничитель 12.
:регулятор 13 тока, усилитель 14 мощ ности, исполнительный двигатель 15, датчики тока 16, скорости 17 и по- 20 ложения 18, блок 19 сравнения, блок 20 вьщеления модуля, компаратор 21, источник 22 опорного сигнала, пороговое устройство 23.
На фиг. 2-5 показаны x;(t) - вы- 25 ходной сигнал i-ro блока; К,- коэффициент передачи датчика 18 положения; epj,, Ср - начальное и конечное положения вала двигателя 15; х. - амплитуда выходного сигнала компара- 30 х. и сигнал отрицательной обратной
формирует сигнал х Xg -sign(Xj- х который при замкнутых ключах 5 и 7 преобразуется первым интегратором
5 б в воздействие Xg ) dt, имеющее форму треугольника (фиг. 2) или трапеции (фиг. 3) в зависимости от того, достигают или нет сигналы Xj и х уровня ограничения Xjjj
а вторым интегратором 8 - в сигнал t
Xg Kg/x(t) dt, изменяющийся от уровня Xg(0) Кдп cfH до уровня АпЧ к участках, где |xg(t)( х по параболическому закону, а на участках, где /Xg(t)j. , линейно (фиг. 2). Сигнал x-(t) является , ,о
основным управляющим воздействием для контура 9 регулирования положением, а сигналы Xg(t) и x,(t), пропорциональные первой и второй произ водным от этого воздействия, исполь зуются для создания параллельных корректирующих связей по каналу зад ния, позволяющих повысить быстродей ствие системы в пускотормозных режи мах.
Регулятор 10 положения преобразу ет управляющие воздействия Хд, х.
5
тора 4j Xgg- максимальная амплитуда выходного сигнала интегратора 6; G3(t) - скорость вращения вала двигателя 15; I(t) - ток двигателя 15; itpg - заданное перемещение; utf (t) - с текущее положение вала двигателя 15; макс максимальное значение тока двигателя 15.
В качестве нелинейного блока могут быть использованы релейные блоки 1 , блок извлечения квадратного корня З.
Система работает следующим образом.
Для того, чтобы переместить вал двигателя 15 из некоторого начального заданного положения ( в конечное (j) необходимо выходной сигнал источника 2 входного сигнала изменить скачком на величину х ( ) Д
связи по положению х
18
К
в си
нал задания на скорость х . Регуля тор 11 скорости преобразует сигнал X ,0, корректирующее управляющее воз действие х и сигнал отрицательной обратной связи по скорости СО двига теля 15 , К . р со во входной сиг
40
нал X 1 для усилителя-ограничителя 12,
Усилитель-ограничитель 12 выраба тывает сигнал
.1
45
X
41
X
Ota
-X
012
если X
если X
если X
1
(I
и
X
01г
Ь X
-X
(
Oii
Кд| - коэффициент передачи датчика 18 положения. Блок 3 осуществляет функцию извлечения квадратного корня из разности выходных сигналов источника 2 входного сигнала и второго интегратора 8, формирует сигнал X , ,,|(х и ограничивает выходной сигнал первого интегратора 6 на уровне X(,g оэ- Компаратор 4
50
Д (г КАТ л(акс уровень огранич ния сигнала зад ния на ток I; К - коэффициент уси ления датчика 1 тока;
максимально доп стимый ток якор двигателя 15. Блок 19 сравнения формирует на своем выходе разность сигналов х
и х,2. t4 н а Блок 20 ввде ления модуля определяет абсолютную величину этой разности Хуз /х,)/ ,
х. и сигнал отрицательной обратной
формирует сигнал х Xg -sign(Xj- х); который при замкнутых ключах 5 и 7 преобразуется первым интегратором
б в воздействие Xg ) dt, имеющее форму треугольника (фиг. 2) или трапеции (фиг. 3) в зависимости от того, достигают или нет сигналы Xj и х уровня ограничения Xjjj
а вторым интегратором 8 - в сигнал t
Xg Kg/x(t) dt, изменяющийся от уровня Xg(0) Кдп cfH до уровня АпЧ к участках, где |xg(t)( х по параболическому закону, а на участках, где /Xg(t)j. , линейно (фиг. 2). Сигнал x-(t) является , ,о
основным управляющим воздействием для контура 9 регулирования положением, а сигналы Xg(t) и x,(t), пропорциональные первой и второй производным от этого воздействия, используются для создания параллельных корректирующих связей по каналу задания, позволяющих повысить быстродействие системы в пускотормозных режимах.
Регулятор 10 положения преобразует управляющие воздействия Хд, х.
связи по положению х
18
К
в сигнал задания на скорость х . Регулятор 11 скорости преобразует сигнал X ,0, корректирующее управляющее воздействие х и сигнал отрицательной обратной связи по скорости СО двигателя 15 , К . р со во входной сиг
нал X 1 для усилителя-ограничителя 12,
Усилитель-ограничитель 12 вырабатывает сигнал
если X
1
X
01г
.1
5
X
Ota
-X
012
если X
если X
(I
и
Ь X
-X
(1 )
Oii
0
Д (г КАТ л(акс уровень ограничения сигнала задания на ток I; К - коэффициент усиления датчика 16 тока;
максимально допустимый ток якорй - двигателя 15. ; Блок 19 сравнения формирует на своем выходе разность сигналов х
и х,2. t4 н а Блок 20 ввде-. ления модуля определяет абсолютную величину этой разности Хуз /х,)/ , а
515134
второй компаратор 21 преобразует ее в сигнал управления х, ключами 5 и 7
Хг1 XQ, signCx Q-x.),
где опорный сигнал, вырабатываемый источником 22 опдрно го сигнала, представляющим собой устройство типа источника опорного напряжения. Источник опорного сигнала 22 необходим для того, чтобы при О компаратор 21 вырабатывал сигнал x, соответствующий замкнутому состоянию управляе- мых ключей 5 и 7,
Регуляторы положения 10 и скорости 11 обычно выполняются пропорциональными или пропорционально интегральными в зависимости от требова- НИИ, предъявляемых к системе. Если они имеют пропорциональные характеристики, то их выходные и входные сигналы связаны между со бой уравнениями
|х,о (хд +K, -x,g)
- х,7 ) Крс,
коэффициенты усиления регуляторов положения и скорости соответственно;
коэффициенты передачи по сигналам параллельных корректиру- 35 ющих связей.
Если регулятор 11 скорости имеет пропорционально интегральную характеристику, то его выходной сигнал следует ограничить, чтобы предотвратить чрезмерное нарастание интегральной составляющей его выходного напряжения в режиме токоограничения Величину сигнала х,, необходимо выбирать из условия надежного изменения состояния компаратора 21 в этом режиме
- X
0(1
х
22
(3)
Пропорционально интегральный регулятор 13 тока преобразует разность сигналов задания на ток х и обратной связи по току x,g K. в сигнал зшравления х усилителем 14 мощности, вырабатывающим сигнал управления х,4 двигателем 15, Под действием этого сигнала в якорной цепи двигателя 15 протекает ток I,
10 15
156 .
создающий в возбужденном двигателе 15 злектромагнитньй момент М С I, в результате чего двигатель 15 вращается со скоростью
С1(|):мс ,
C0(t)
где I - момент инерции двигателя 15; Mj, - момент статического сопротивления на валу двигателя 15;
С - коэффициент пропорциональности между током I и моментом Mj Пока выполняется условие
0
М, (С Г
(4)
5
0
5
0
5
т. Р )
с макс - -.
где jj - желаемое ускорение двигателя 15, определяемое настройкой блоков задающего устройства 1,
усилитель-ограничитель 12 работает
в линейной зоне, т,е.
х х„ .(5)
Поэтому выходные сигналы б..ока Т9 сравнения х, х „ - . и блока 20 вьщеления модуля x-j |х( равны нулю, а второй компаратор 21 под действием небольшого по в.аиичине опорного сигнала х. находится в состоянии, при котором управляющие ключи 5 и 7 замкнуты (х- х г X sign(-x.) система отрабатывает заданное перемещение 6(3 - Ц(, (фиг. А).
При возрастании статического момента М. на валу двигателя 15 до такой величины, что условие (4) становится несправедливым, ускорение двигателя 15 уменьшается (), результирующие входные сигналы регуляторов положения 10 и скорости 11 увеличивается, что приводит к насыщению усилителя-ограничителя 12 и переходу системы в режим токоограничения. Этот режим может возникнуть и в начале процесса изменения задающего воздействия, когда двигатель 15 даже при максимально допустимом токе якоря Т ;, не вращается (сО 0), из-за того, что Вследствие насьщения усилителя-ограничителя 12 равенство (5) нарушается (уравнение (1)) и на выходах блока 19 сравнения и блока 20 вьщеления модуля появляются сигналы. При х х. состояние компаратора 21 изменяется, ,
15
что приводит к размыканию управляемых клкгчей 5 и 7 и прекращению роста, управляюпщх сигналов х, и х- на
о 8
выходах интеграторов 6 и 8 задающего устройства 1. Благодаря этому после выхода системы из режима токоограни- чения отработка заданного перемещения осуществляется бев колебаний вокруг установившегося положения ш (фиг, 5). 10
Указанные отличительные особенноти позволяют повысить быстродейстие и уменьшить колебательность пред- агае,мой системы, т.е. позволяют трабатывать любые входшш сигналы
без перерегулирования и дотягивания, Повьшается надежность установок, в которьпс применяется система ..так как колебания системы вокруг установившегося положения могут привести к аварюто Например, при управлении
приводом налдамньтк винт. ов обжимных прокатных станов задание на перемещение верхнего валка, вниз подают -j
в то время, когда прокатьюаег/ый металл еще находится в клети, что приводит к возникновению режима упора. Это делают для улучшения структуры металла хвостовой, части слитка.. Ес20
30
ли в системе управления не преду- Смотреть меры по устранению колеба- 1ний привода вокруг установившегося, значения при выходе из.режима упора, то после выброса слитка из клети может произойти тяжелая авария: посадка валка На валок.
Формула изобретения
Система управления положением, содержащая последовательно соединен5
0
0
0
5
0
ные источник входного сигнала, натти- нейпый блок и кo fflapaтop, подключенный выходом к первым входам регулятора скорости и регулятора положения , соединенного вторым входом с выходом первого интегратора и с вторым входом компаратора, третьим входом - с выходом второго интегратора и с вторым входом нелинейного блока, четвертым входом - с выходом датчика положений, а выходом - с вторым входом регулятора скорости, подключенного третьим входом к выходу датчика скорости, и последовательно соединенные регулятор тока, усилитель мощности и исполнительный двигатель, вал которого кинематически связан с валами датчиков положения и скорости, а электрический выход которого соединен с входом датчика тока, подключенного выходом к первому входу регулятора тока, отличаю- щ а я с.я тем, что, с целью повышения быстродействия и уменьшения колебательности системы, в нее дополнительно введены блок сравнения, пороговое устройство, два ключа и усилитель-ограничитель, соединенный входом, с выходом регулятора скорости и первым входом блока Сравнения, а выходом - с вторыми входами регулятора тока и блока сравнения, подключенного выходом через пороговое устройство к управляющим входам обоих - ключей, информациоьшый вход первого ключа соединен с выходом компаратора, а выход - с входом первого, интегратора, подключенного выходом к икформа- ipioHHOMy входу второго , соединенного выходом с входом второго ИИ- тегратора.
-tf (i I Xf /y
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| Система автоматического управления газотурбинной установкой | 1988 |
|
SU1539356A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Устройство управления приводом балансировочного стенда | 1982 |
|
SU1019396A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2173931C1 |
Изобретение относится к металлургии и машиностроению и может быть использовано для управления положением нажимных винтов прокатных станов. Цель изобретения - повышение быстродействия и уменьшение колебательности системы. Поставленная цель достигается за счет того, что входной сигнал системы сравнивается с выходным сигналом второго интегратора и из полученной разности извлекается квадратный корень. Результат сравнивается в компараторе с выходным сигналом первого интегратора и полученный результат поступает на вход первого интегратора и с его выхода-на вход второго интегратора. Выходной сигнал второго интегратора поступает на вход регулятора положения, в котором сравнивается с выходным сигналом датчика положения и суммируется с выходными сигналами компаратора и первого интегратора. Выходной сигнал регулятора положения сравнивается в регуляторе скорости с выходным сигналом датчика скорости и суммируется с сигналом выхода компаратора. Выходной сигнал регулятора скорости усиливается, ограничивается и в датчике тока сравнивается с выходным сигналом датчика тока, выходной сигнал регулятора тока усиливается по мощности и поступает на вход двигателя. Выходные сигналы регулятора скорости и усилителя-ограничителя сравниваются и поступают на вход порогового устройства, выходной сигнал которого подается на управляющие входы ключей, которые отключают вход первого интегратора от выхода компаратора и вход второго интегратора-от выхода первого интегратора. В качестве регуляторов применяются ПИ-регулирующие блоки. 5 ил.
здтжч
l/«,/5;/
w
f-l
ff
12
(-}
H
/
3 (Риг.1
W
.г
1(/1
хМ
Редактор И, Шулла
Составитель Г. Нефедова
Техред Л.Олийнык Корректор С. Черни
Заказ 6076/46
Тираж 788
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
XJt
ФигЛ
м
Фиг.б
Подписное
