технике, а именно к электроприводам постоянного тока, система управления которыми выпол1|ена по принципу подчи- g ненного регулирования, и может быть использовано для стабилизации и регулирования скорости машин, статическая нагрузка- которых изменяется в широких пределах., 10
Цель изобретения - снижение перерегулирования тока и скорости в переходных режимах.
На фиг.1 изображена функциональскорости й ,. т.е. в линейной и нелинейной зонах.
Электропривод работает следующим образом.
При набросе статической нагрузки (фиг. 2) скорость ) электродвигателя, соответствующая заданию ), скорости от задатчика 3, начинает снижаться, что приводит к появлению на выходе пропорционального регулятора 4 скорости напряжения, соответствующего отклонению скорости от установивщеная схема предлагаемого электроприво- 15 гося значения д . Это вызывает уве- да; на фиг.2 - графики переходных личение напряжения на выходах функ- процессов при ступенчатом приложении статической нагрузки; на фиг.З - то
ционального преобразователя 5, блока 6 сравнения и блока 14 ограничения. Последнее пропорционально заданной
же, при ступенчатом изменении сигнационального преобразователя 5, блока 6 сравнения и блока 14 ограничения. Последнее пропорционально заданной
ла задатчика скорости; на фиг.4 - ха- 20 производной di/db тока и интегрйрурактеристика вход-выход функционального преобразователя b контуре скорости.
Электропривод (фиг.1) содержит электродвигатель 1, подключенный к преобразователю 2, в цепь управления которого включены последовательно соединенные задатчик 3 скорости, регулятор 4 скорости, функциональный
ется задатчиком 7 темпа нарастания тока. График 15 (фиг.2) изменения выходного напряжения задатчика -7 темпа ij которое является задающим 25 для контура регулирования тока
1,образованного регулятором 9 тока, управляемым преобразователем
2,цепью якоря электродвигателя 1 и
датчиком 13 тока, при быстродействую- преобразователь 5 и блока 6 сравнения 30 Щем контуре регулирования тока прак последовательно соединенные задатчик тичeckи совпадает с графиком текуще- 7 темпа нарастания тока с блоком 8 ограничения и регулятор 9 тока, а также последовйтельно соединенные интегратор 10 и сумматор 11, второй вход которого связан с выходом дат35
го значения тока i. График 16 характеризует при этом изменение отклонения от установившегося значения скорости электродвигателя 1 - д и соответственно изменение выходного напряжения пропорционального регулятора 4 скорости.
чика 12 скорости, а выход подключен к суммирующему входу блока 6 сравнения и входу интегратора 10, второй i
го значения тока i. График 16 хара теризует при этом изменение отклон ния от установившегося значения ск рости электродвигателя 1 - д и с ответственно изменение выходного н пряжения пропорционального регулят ра 4 скорости.
На выходе сумматора I1 форми
вход которого соединен с выходом дат- 40 напряжение, пропорциональное
статической составляющей i,. тока которое блоком 6 сравнения суммир ся с выходным напряжением функционального преобразователя 5. Поскол ку к входу блока 6 сравнения подво дится также с обратным знаком выхо ное напряжение задатчика 7 темпа н растания тока, которое пропорционально заданию полного тока якоря
чика 13 тока. Электропривод содержит также второй блок 14 ограничения, включенный между выходом блока 6 сравнения и входом задатчика 7 темпа нарастания тока, выход которого связан cf вычитающим входом блока 6 сравнения.
На фиг.2 приведены графики 15 тока и 1 6 динамического падения скорости двигателя Л при набросе статической нагрузки. На фиг.З приведены графики 17 и 18 тока и 19 и 20 отклонения скорости двигателя от заданного значения й-5 при ступенчатом из45
статической составляющей i,. тока, которое блоком 6 сравнения суммирует ся с выходным напряжением функционального преобразователя 5. Поскольку к входу блока 6 сравнения подводится также с обратным знаком выходное напряжение задатчика 7 темпа нарастания тока, которое пропорционально заданию полного тока якоря i
50
выходное напряжение функционального преобразователя 5 на входе блока 6 сравнения
ig i - ic О) пропорционально заданию динамической
менении сигнала задатчика 3 скорости gg составляющей тока.
5-., и соответственно на входе При неизменной величине статичесрегулятора 4 скорости
(фиг.2) характеризует также динамическую составляющую тока ig, измеНа фиг.4 приведена характеристика вход - выход функционального преобразователя 5 при
скорости й ,. т.е. в линейной и нелинейной зонах.
Электропривод работает следующим образом.
При набросе статической нагрузки (фиг. 2) скорость ) электродвигателя, соответствующая заданию ), скорости от задатчика 3, начинает снижаться, что приводит к появлению на выходе пропорционального регулятора 4 скорости напряжения, соответствующего отклонению скорости от установивщегося значения д . Это вызывает уве- личение напряжения на выходах функ-
ционального преобразователя 5, блока 6 сравнения и блока 14 ограничения. Последнее пропорционально заданной
ется задатчиком 7 темпа нарастания тока. График 15 (фиг.2) изменения выходного напряжения задатчика -7 темпа ij которое является задающим 25 для контура регулирования тока
1,образованного регулятором 9 тока, управляемым преобразователем
2,цепью якоря электродвигателя 1 и
датчиком 13 тока, при быстродействую 30 Щем контуре регулирования тока прак тичeckи совпадает с графиком текуще-
35
го значения тока i. График 16 характеризует при этом изменение отклонения от установившегося значения скорости электродвигателя 1 - д и соответственно изменение выходного напряжения пропорционального регулятора 4 скорости.
На выходе сумматора I1 формиру напряжение, пропорциональное
статической составляющей i,. тока, которое блоком 6 сравнения суммируется с выходным напряжением функционального преобразователя 5. Поскольку к входу блока 6 сравнения подводится также с обратным знаком выходное напряжение задатчика 7 темпа нарастания тока, которое пропорционально заданию полного тока якоря i.
выходное напряжение функционального преобразователя 5 на входе блока 6 сравнения
31332497
ие которой при постоянстве входо напряжения задатчика 7 темпа шнейно во времени, т.е ig et,
Зл et,(2)
Ug/Ty di/dt - заданная величина производ-- ной тока;
Тц - постоянная интегрированиязадатчика 7 темпа.
Изменение отклонения скорости ктродвигателя 1 соответствует инральному уравнению
Д Т-; igdt,
рое с учетом выражения (2), так ig « ig, , имеет решение
.. й (3)
J
Т; - инерционная постоянная времени привода (Т; j--),
И ,,
J
н н х ж с
10 п ж со г ск
15 ч до с 1
20 не
25 i от ли ЗС ни
J н
м. приведенный к валу электродвигателя 1 момент инерции привода;
номинальное значение угловой скорости и электромагнитного момента электродвигателя I о
Исключив из выражений (2) и (3) араметр времени t, получим уравнение
(4)
i3jH2 TjA оторое является уравнением оптималь1„ 1(1 + 1/). (6) Выражение (6) определяет также выходное напряжение задатчика 7 темпа в момент времени t, (фиг.2).
Площадь треугольника &4 составля35
ной по быстродействию фазовой траектории. Настраивая характеристику 22 вход - выход функционального преобразователя 5 (фиг.4) соответственно
уравнению (4) (вход й , выход ig, ), о ет половину площади треугольника S B , получим предельную по быстродействию
отработку отклонения скорости й-5 элек- S feq, 2 поэтому в точке о тродвигателя 1, т.е. нарастание то- графика 15 отклонение скорости Д ка до момента времени t, (фиг.2) с уменьшается до величины , т.е. предельно допустимым темпом и перек- . отрабатьшается наполовину. Если в лючение в момент t, тока на спадание уравнение (4) характеристики 22 входвыход функционального преобразователя 5 подставить значение д /2 ip/4Т; , полученное с помощью вьфа- ния нарастающим напряжением i задет- JQ жения (5), можно получить, что вы- чика 7 темпа на входе блока 6 сравне- ходное напряжение функционального
с тем же темпом до значения статической составляющей i.. Момент времени t;, соответствует началу превьппения уменьшающейся, вследствие уменьшения отклонения скорости Д-- , суммы
преобразователя 5 или заданное значение динамической составляющей тока ig в момент времени t
напряжения
3j
сПри этом реверсируются напряжение на выходе блока 6 сравнения и выходное напряжение блока 14 ограничения, и задатчик 7 темпа начинает линейно снижать свое выходное напряжение.
Докажем, что в момент времени t, (фиг.2) уменьшающаяся сумма напряжений (ig,-i-ig) на входе блока 6 сравнения уравнивается с напряжением ij задатчика 7 темпа, после чего происходит оптимальное переключение напряжений блока 14 ограничения и соответственно переключение выходного на 10 пряжения 1л задатчика 7 темпа на снижение . Пока ток меньше статической составляющей (i i, участок О-а графика 15), имеют место снижение скорости электродвигателя 1 и увели15 чение отклонения скорости uv. Наибольшего значения Л отклонение uv. достигает в момент времени, соответствующий точке S , т.е. равенству . Величину й определим из урав20 нения (3), подставив в него значение
t -Je .
д i,/2T.E. (5) На участке S -о -Z графика 15 ток i превьш1ает статическую составляющую 25 i (i ig), и имеет место отработка отклонения скорости ,(5). В точке b ток достигает наибольшего значения i, величину которого можно определить из равенства площадей треуголь- ЗС ника Оа& : При этом
, Ss62 (iM - ip °- лучаем уравнение
1у25(1м- ie) /, откуда
1„ 1(1 + 1/). (6) Выражение (6) определяет также выходное напряжение задатчика 7 темпа в момент времени t, (фиг.2).
Площадь треугольника &4 составля35
о ет половину площади треугольника S B ,
преобразователя 5 или заданное значение динамической составляющей тока ig в момент времени t
55ij - ic/ 2. (7)
Сумма выходных напряжений функ- ционального преобразователя 5 и сумматора II на входе блока 6 сравнения при этом
il + i, ij- i,.i,(Hl/),
что совпадает с выражением (6).
Таким образом, в момент времени t, (фиг.2) дост,игается баланс напря- же1ШЙ на входах блока 6 сравнения, после чего этот баланс нарушается, так как уменьшается отклонение Д скорости и соответственно снижается
его максимального значения и ограничения его блоком 8 ограничения. Переключение при этом выходного напряжения задатчика 7 на снижение тока происходит также оптимально в момент наступления баланса напряжений на входах блока 6 сравнения, так как выт ходное напряжение функционального
выходное напряжение регулятора 4 ско- ю преобразователя 5, которое определярости и функционального преобразователя 5. Это соответствует оптимальному переключению тока i электродвигателя 1 на снижение до оптимальной по быстродействию отработки отклонения скорости л .
В точке 2 графика 15 ток i снижается до значения статической составляющей i , динамическая составляющая становится равной нулю, отклонение скорости Д- также отрабатывается до нуля. При этом выходное напряжение регулятора 4 скорости и функционального преобразователя 5 становится
нулевьм, на входах блока 6 сравнения 25 напряжение i (фиг.З, график 17),
J
наступает баланс напряжений, обнуляется выходное напряжение блока 14 ограничения, прекращается изменение выходного напряжения задатчика 7 темпа
и наступает установившийся режим ра- зо график 19) выходное напряжение ре- боты.
Для ус.тор чивости замкнутого контура регулирования скорости электродвигателя 1 вблизи малых отключений скорости д функциональный преобразователь 5 переключается на характеристику 21 (фиг.4), которая обеспечивает оптимизацию переходной функции
35
гулятора 4 скорости и функциональн.о преобразователя 5 уменьшается и Б м мент времени t, (фиг.З) наступает баланс иапр;о е11ий на входах блока 6 сравнения, а затем и реверс его выходного напряжения. Так как выходно напряжение функционального преобразователя 5 связано оптимальной зави симостью (4) с фактическим отклонегулятора 4 скорости и функциональн.ог преобразователя 5 уменьшается и Б мо мент времени t, (фиг.З) наступает баланс иапр;о е11ий на входах блока 6 сравнения, а затем и реверс его выходного напряжения. Так как выходное напряжение функционального преобразователя 5 связано оптимальной зависимостью (4) с фактическим отклонеконтура в малом, например по модульному критерию оптимизации, когда кон- о м скорости Л , момент t, перектур функционирует в линейной зоне. Одновременно, так как интегральный задатчик 7 темпа охвачен через блоки 6 и 14 отрицательной обратной связью задатчик 7 темпа начинает функционировать как обычное инерционное звено. При этом в замкнутом контуре регулирования скорости остается лишь одно интегрирующее звено электродвигателя 1 с ностоянной интегрирования Т:, контур скорости устойчив, и качество регулирования скорости повышается .
Указанный цикл отработки отклонения скорости электродвигателя &) при набросе статической нагрузки не изменяется при увеличении линейно-нарастающего напряжения на выходе задатчика 7 темпа нйрастания тока до сво1332497
его максимального значения и ограничения его блоком 8 ограничения. Переключение при этом выходного напряжения задатчика 7 на снижение тока происходит также оптимально в момент наступления баланса напряжений на входах блока 6 сравнения, так как выт ходное напряжение функционального
ет момент переключения, связано оптимальной зависимостью (4) с фактическим отклонением скорости (характеристика 22).
При ступенчатом изменении SOi, сигнала задания -J, на входе регулятора 4 скорости (фиг.З) ноявляется сигнал ошибки и ) на его выходе и соответственно появляется напряжение J-ai на выходе фуик1,нональнот о преобразователя 5. Если при этом статическая нагрузка отсутствует, под действием напряжения in а задатчик 7 темпа начинает линейно увеличиватьсвое выходное
напряжение i (фиг.З, график 17),
J
которое отрабатывается контуром ре- гулирова 1ия тока и с обратным знаком подводится к блоку 6 сравнения, По мере уменьшения ошибки Лл) (фиг. 3,
график 19) выходное напряжение ре-
гулятора 4 скорости и функциональн.ого преобразователя 5 уменьшается и Б момент времени t, (фиг.З) наступает баланс иапр;о е11ий на входах блока 6 сравнения, а затем и реверс его выходного напряжения. Так как выходное напряжение функционального преобразователя 5 связано оптимальной зависимостью (4) с фактическим отклоне м скорости Л , момент t, переключения выходного напряжения задатчн- ка 7 темпа на снижение и соответственно снижение тока i соответствуют ситуации, при которой в конце про- r цесса снижения тока отклонение скорости Л-5 y eньшaeтcя до нуля, т.е. оптимально отрабатьтается ст тгенчатое изменение скорости .
Цикл отработки 8, не отличается
от оптимального при наличии статической нагрузки либо при выходе линейно изменяющегося напряжения задатчика 7 темпа нарастания тока на ограничение (фиг.З, графики Л 9 и 20).
Измеритель статической составля0
5
ющей тока якоря i,,, образованный интегратором 10 и сумматором 11, функционирует в соответствии с н ггеграль- ным уравнением
где Т
.if,; - с)- ic. (8)
fO
постоянная интегрирования интегратора 10;
К.. 1, Р(9)
коэффициент усиления сумматора 11; выходной сигнал сумматора П ; оператор. Из уравнения (8) получим
i izElipjL
с рТ„/К„-И
Так как поток возбуждения электродвигателя 1 постоянен, ток i пропорционален моменту М электродвигателя , а статическая составляющая тока i пропорциональна моменту статической нагрузки М.
Если принять постоянную интегрирования Т,д интегратора 10 равной инерционной постоянной двигателя Т.- ,
ке воздействий нагрузки в режиме стабилизации скорости и при изменениях задания скорости. Одновременно пони- с жается порядок астатизма контура скорости и снижается перерегулирование тока и скорости электродвигателя в переходных процессах.
т.е.
Т
Ч
на основании уравнения
(9) можно увидеть, что выходной сигнал сумматора 11 пропорционален моменту статической нагрузки М, так как Ti-T d /dt M (в относительных единицах). Выбрав коэффициент усиле10 Формула изобретения
Электропривод постоянного тока, содержапщй электродвигатель, подключенный к преобразователю, в цепь
15 управления которого включены последовательно соединенные задатчик скорости, регулятор скорости, функциональный преобразователь и блок сравнения, последовательно соединенные задатчик
20 темпа нарастания тока с блоком ограничения и регулятор тока, а также последовательно соединенные интегратор и сумматор, второй вход которого связан с выходом датчика скорости,
25 а выход подключен к суммирующему входу блока сравнения и к первому входу интегратора, второй вход которого соединен с выходом датчика тока, о т ния К
((
личающийся тем, что, с сумматора 1I достаточно боль- 30 целью снижения перерегулирования тока
шим, измерение статической составляющей тока практически безинерциоино. Таким образом, предлагаемый электропривод постоянного тока позволяет получить оптимальные по быстродейсти скорости в переходных режимах, в него введен второй блок ограничения, включенный между выходом блока сравнения и входом задатчика темпа нарас- 35 тания тока, выход которого связан с
ВИЮ переходные процессы при отработ- вычитающим входом блока сравнения.
13324978
ке воздействий нагрузки в режиме стабилизации скорости и при изменениях задания скорости. Одновременно пони- с жается порядок астатизма контура скорости и снижается перерегулирование тока и скорости электродвигателя в переходных процессах.
10 Формула изобретения
Электропривод постоянного тока, содержапщй электродвигатель, подключенный к преобразователю, в цепь
15 управления которого включены последовательно соединенные задатчик скорости, регулятор скорости, функциональный преобразователь и блок сравнения, последовательно соединенные задатчик
20 темпа нарастания тока с блоком ограничения и регулятор тока, а также последовательно соединенные интегратор и сумматор, второй вход которого связан с выходом датчика скорости,
25 а выход подключен к суммирующему входу блока сравнения и к первому входу интегратора, второй вход которого соединен с выходом датчика тока, о т и скорости в переходных режимах, в него введен второй блок ограничения, включенный между выходом блока сравнения и входом задатчика темпа нарас- 35 тания тока, выход которого связан с
вычитающим входом блока сравнения.
tl.t
16
ЛУ
Фиг. 2
(
22
J)
5):
7г
Фиг.З
/IV
4V
2/
+
22
1г,
ФигЛ
Редактор И.Горная
Составитель В.Кузнецова
Техред З.Кадар Корректор В.Гирняк
Заказ 3845/53 Тираж 659Подписное
ВНИШТИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока | 1984 |
|
SU1264286A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Электропривод постоянного тока | 1984 |
|
SU1159141A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Устройство управления добычным комплексом драги | 1986 |
|
SU1434038A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |

Изобретение относится к электротехнике и может быть использовано в системах с подчиненным регулированием. Целью изобретения является снижение перерегулирования тока и скорости в переходных режимах. Электропривод содержит второй блок 14 ограничения, включенный между выходом блока 6 сравнения и входом задатчика 7 темпа нарастания тока. Выход задатчика 7 темпа нарастания тока связан с вычитающим входом блока 6 сравнения. Предлагаемый электропривод позволяет получить оптимальные по быстродействию переходные процессы при отработке воздействий нагрузки в режиме стабилизации скорости и при изменениях задания скорости. 4 ил. С/)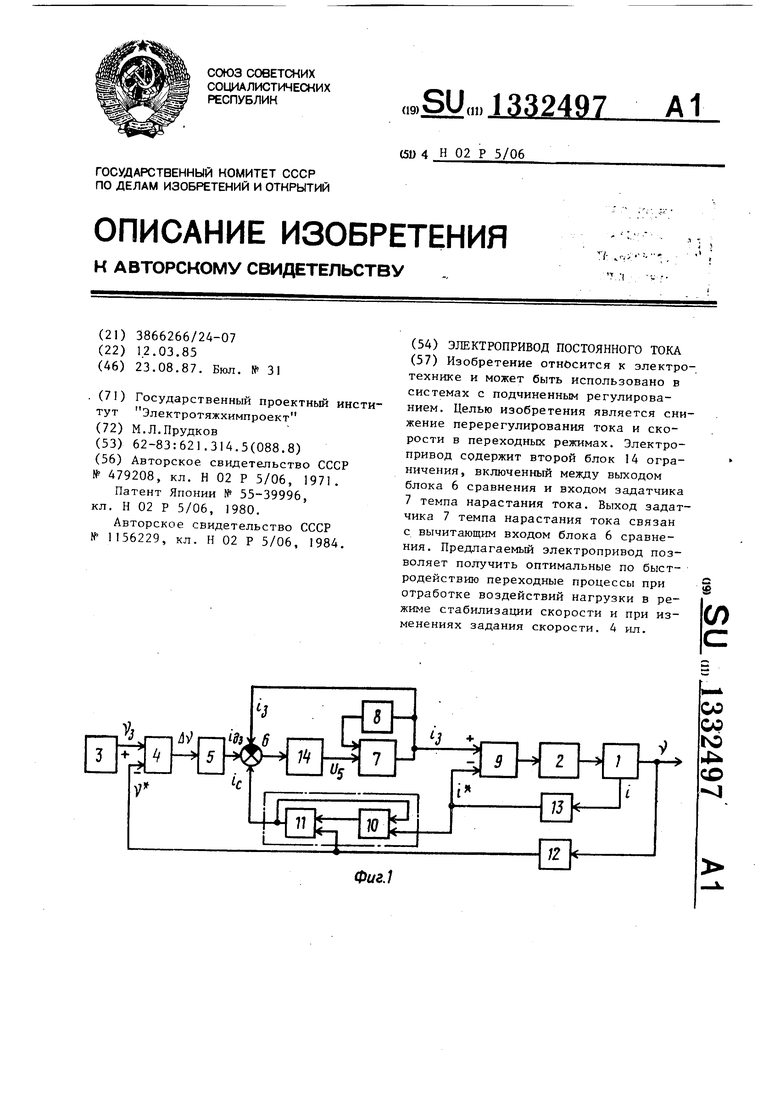
| Двухкратноинтегрирующая система подчиненного регулирования скорости привода | 1973 |
|
SU479208A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ испытания герконового реле | 1983 |
|
SU1136229A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
