2)
Фиг.1 Изобретение относится к измерив . тельной технике и может быть использовано, например, для бесконтактного измерения линейных размеров проката. Известен способ измерения .линейных размеров проката, основанный на создании с помощью объектива теневой проекции предмета в плоскости изображения и измерении координат проеекции дискретным фото:электричесКИМ преобразователем (ДФП) fl. Недостатком данногр способа является низкая точность и низкая помехо защищенность. Наиболее близким по технической сущности к изобретению является способ, заключающийся в получении теневой проекции предмета на расположенном в плоскости изображения объектива сканирующем фотопреобразователе, например дискретном на приборе с зарядной связью (ПЗС), преобразовании теневой проекции в видиоимпульс и определении изменяемого размера псэ положению фронта видеоимпульса, положение фронта видеоимпульса определяют положением соответ ствующего засвеченного элемента, при этом засвеченным считается тот элемент , амплитуда которого превышает уровень, выбранный с учетом соотноше ния полезного и шумового сигналов С21 Недостатками такого способа являются предельная точность, определяемая дискретным шагом элементов в строке, а также низкая помехоустойчи вость к импульсным помехам по фронту видеоимпульса. Цель изобретения - повышение точности и помехозащищенности измерения Поставленная цель достигается тем что согласно бесконтактному способу определения положения кромки предмета, заключающемуся в получении теневой проекции предмета на расположенном в плоскости изображения объектив сканирующем фотопреобразователе, например дискретном на приборе с зарядовой связью, преобразовании теневой проекции в видеоимпульс и определении измеряемого размера по положению фронта видеоимпульса, видеоимпульсы интегрируют по крайней мере в пределах его фронта, измеряют амплитуду видеоимпульса, определяют положение фронта относительно конца интервала интегрирования по отношению величины полученного интеграла к амплитуде видеоимпульса, измеряемый размер определяют как сумму положения-фронта относительно конца интервала и остав шейся части видеоимпульса. На фиг. 1 изображена зависимость освещенности сканирующей линии сплош ного фотопреобразователя; на фиг. 2зависимость освещенности вдоль сканирующей линии дискретного фотопреобразователя; на фиг. 3 - блок-схема устройства реализующего предлагаемый способ измерения. На фиг. 1 сплошной линией показана зависимость (х) освещенности предмета в плоскости изображения вдоль сканирующей линии преобразователя (осб X). Бели фотопреобразоватёль сплошной, то этот же график будет изображать собой видеоимпульс (при линейном фотопреобразователе), А - амлитуда видеосигнала, Х - начало фронта видеоимпульса,. Х - конец 4фонта видеоимпульса. При интегральной оценке положения координаты на оси X берется интервал, начало которого совпадает с началом фронта Х,, а длительность Т несколько больше длительности фронта, при этом координата X у - Х„+ ,. Проинтегрируем видеоимпульс в пределах длительности интервала Т и возьмем отношение полученного интеграла 3 к амплитуде А2. Площгщь интегрирования -на фиг. 1 показана штриховкой. Она равна площади прямоугольника с высотой А-, и некоторой шириной (X . Хф) , которая служить мерой положения кромки предмета. (Хт-Хф) Из уравнения динату кромки 4rV Г А, Величина интеграла в выражении (2) при неизменной форме и длительности фронта - величина постоянная и, следовательно, смещение кромки на величину 4 X приведет к чаксялу же смет1ению XK и Хф. Как видно из уравнения (2), координата Хф не зависит от длительности интервала Т. При изменении освещенности все координаты f(X изменяются в/ираз, т.е. f (X) f (X) , соответственно А. Начало и конец фронта, а также длительность интервала Т остаются теми же. Тогда хкХК . S f lXleJxi ju,f(x)dx Л, л Л.
Таким образом координата зависит от изменения освещенности и амплитуды видеоимпульса.
Как видно из уравнения. () получение интегральной сценки связано с определением координаты XH начала фрон та. Можно значение Х выбрать ранее действительного начала фронта, так как значение ) до начала фронта равно 0. Можно начало интегирования определять по уровню отсечки например, . 1) в точке 0 ,т.е. X. Xjj. Если уровень отсечки брать пропорциональным амплитуде А , то при ее Д1змене|)ии (кривая f (X) пересечение уровня отсечки J с кривой fj (X) в точке 02 будет на той же координате X g . При этом все рассуждения и полученные формулы остаются справедливыми, только вместе Xf следует брать значение XQ и от него же следует отсчитывать интервал Т.
В случае .сплошного фотопреобразователя интегральная оценка положения кромки обеспечивает те же метрологические характеристики, что и привязка на пропорциональном уровне. Учитывая, что схемная реализация интегральной рценки сложнее, чем привязка на пропорциональном уровне, интегральную оценку для сплошных преобразователей следует использовать в случаях наличия высокочастотных помех на фронте, так как при интегрировании высокочастотной помехи ее влияние на точность измерения существенно уменьшается.
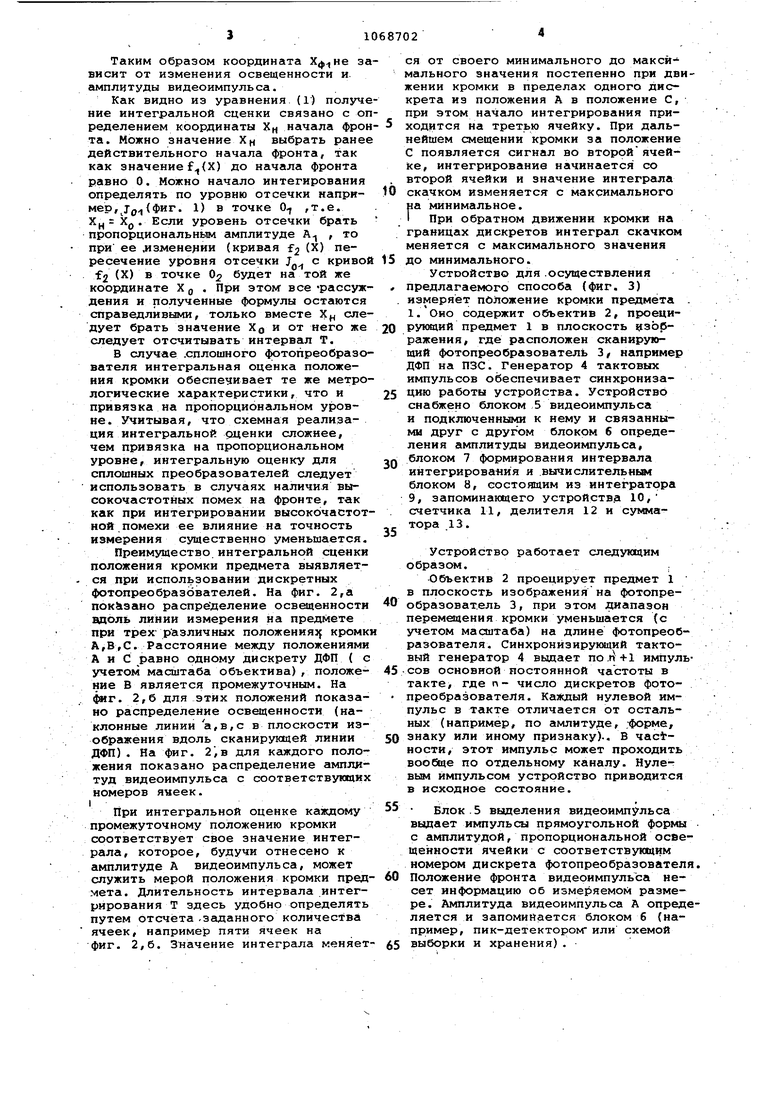
Преим1т1ество интегральной сценки положения кромки предмета выявляется при использовании дискретных фотопреобразователей. На фиг. 2,а показано распределение освещенности вдоль линии измерения на предмете при трех различных положения:} кромки А,В,С. Расстояние между положениями А и С равно одному дискрету ДФП ( с учетом масштаба объектива), положение В является промежуточным. На фиг. 2,6 для этих положений показано распределение освещенности (наклонные линии а,в,с в плоскости изображения вдоль сканирующей линии ДФП) . На фиг. 2,в для каждого положения показано распределение амплитуд видеоимпульса с соответствующих номеров ячеек.
I
При интегральной оценке каждому промежуточному положению кромки соответствует свое значение интеграла, которое, будучи отнесено к амплитуде А видеоимпульса, может служить мерой положения кромки предмета. Длительность интервала интегрирования Т здесь удобно определять путем отсчёта -згщанного количества ячеек, например пяти ячеек на фиг. 2,6. Значение интеграла меняется от своего минимального до максимального значения постепенно при двжении кромки в пределах одного дискрета из положения А в положение С, при этом начало интегрирования приходится на третью ячейку. При дальнейшем смещении кромки за положение С появляется сигнал во второйячейке, интегрирование начинается со второй ячейки и значение интеграла скачком изменяется с максимального на минимальное.
I При обратном движении кромки на границах дискретов интеграл скачком меняется с максимального значения до минимального.
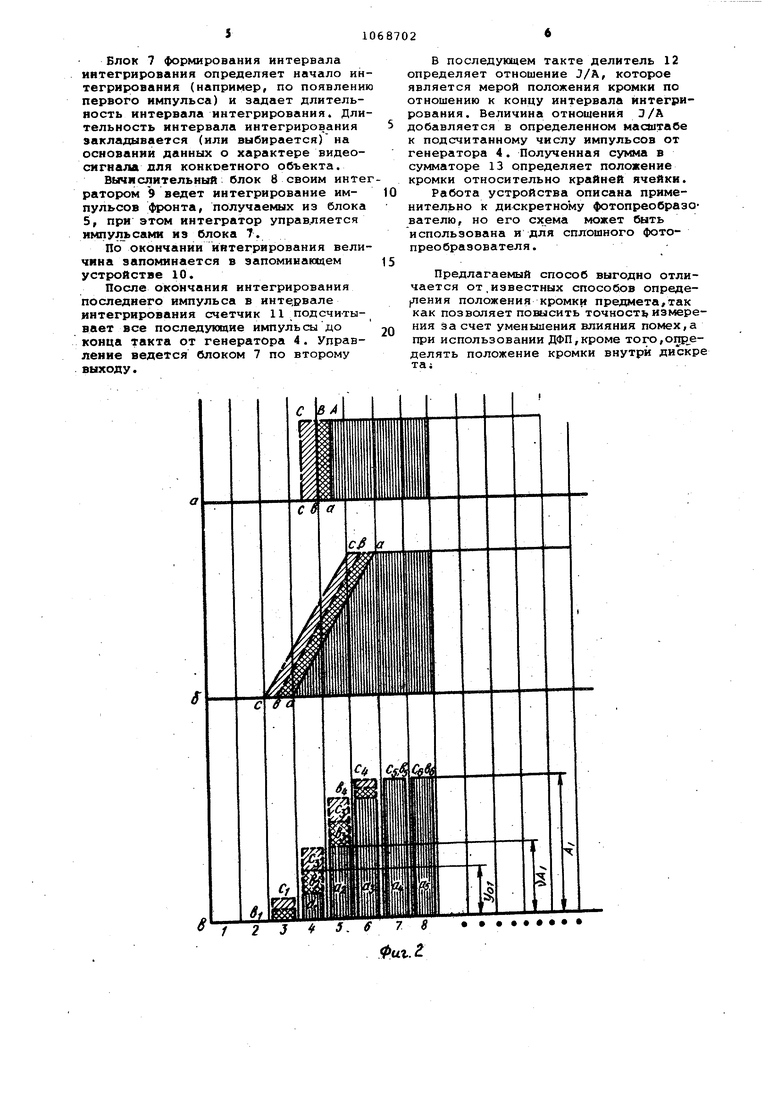
УСТРОЙСТВО для .осуществления предлагаемого способа (фиг. 3) измеряет положение кромки предмета I.OHO содержит объектив 2, проецирующий предмет 1 в плоскость изображения, где расположен сканирующий фотопреобразователь 3/ например ДФП на ПЗС. Генератор 4 тактовых импульсов обеспечивает синхронизацию работы устройства. Устройство снабжено блоком 5 видеоимпульса и подключенныьш к нему и связанными друг с другом блоком 6 определения амплитуды видеоимпульса, блоком 7 формирования интервала интегрирования и .вычислительньм блоком 8, состоящим из интегратора 9, запоминающего устройств 10, счетчика 11, делителя 12 и сумматора 13.
Устройство работает следующим образом.:
Объектив 2 проецирует предмет 1 в плоскость изображения на фотопреобразоват.ель 3, при этом диапазон перемещения кромки уменьшается (с учетом масштаба) на длине фотопреобразователя. Синхронизирующий тактовый генератор 4 выдает по, импулсов основной постоянной частоты в такте, где п- число дискретов фотопреобразователя. Казкдый нулевой импульс в такте отличается от остальных (например, по амлитуде, форме, знаку или иному признаку).. В частности, этот импульс может проходить вообще по отдельному каналу. Нулевым импульсом устройство приводится в исходное состояние.
Блок.5 выделения видеоимпульса выдает импульсы прямоугольной формы с амплитудой, пропорциональной освещенности ячейки с соответствующим номером дискрета фотопреобразовател Положение фронта видеоимпульса несет информацию об измеряемом размере. Амплитуда видеоимпульса А опредляется и запоминается блоком б (например, пик-детектором или схемой выборки и хранения). Блок 7 формирования интервала интегрирования определяет начало и тегрирования (например, по появлен первого импульса) и задает длительность интервала интегрирования. Дли тельность интервала интегрирования закладывается (или выбираетсяГ на основании данных о характере видеосигнала для конкоетного объекта. Вычислительный блок 8 своим инте ратором 9 ведет интегрирование импульсов фронта, получаемых из блока 5, при этом интегратор управ.ляется импульсами из блока Т. По окончании ийтегрирования вели чина запоминается в запоминающем устройстве 10. После окончания интегрирования последнего импульса в интервале интегрирования счетчик и подсчитывает все последующие импульсы до конца такта от генератора 4. Управление ведется блоком 7 по второму выходу. В последующем такте делитель 12 определяет отношение J/A, которое является мерой положения кромки по отношению к концу интервала интегрирования. Величина отношения D/A добавляется в определенном масштабе к подсчитанному числу импульсов от генератора 4. Полученная сумма в сумматоре 13 определяет положение кромки относительно крайней ячейки. Работа устройства описана применительно к дискретному фотопреобразователю, но его схема может быть использована и для сплошного фотопреобразователя. Предлагаемый способ выгодно отличается от,известных способов опре е 1ения положения кромки предметаГтак как позволяет пошлситьточность иэк рения за счет уменьшения влияния помех,а при использовании ДФП,кроме того,определять положение кромки внутри дискре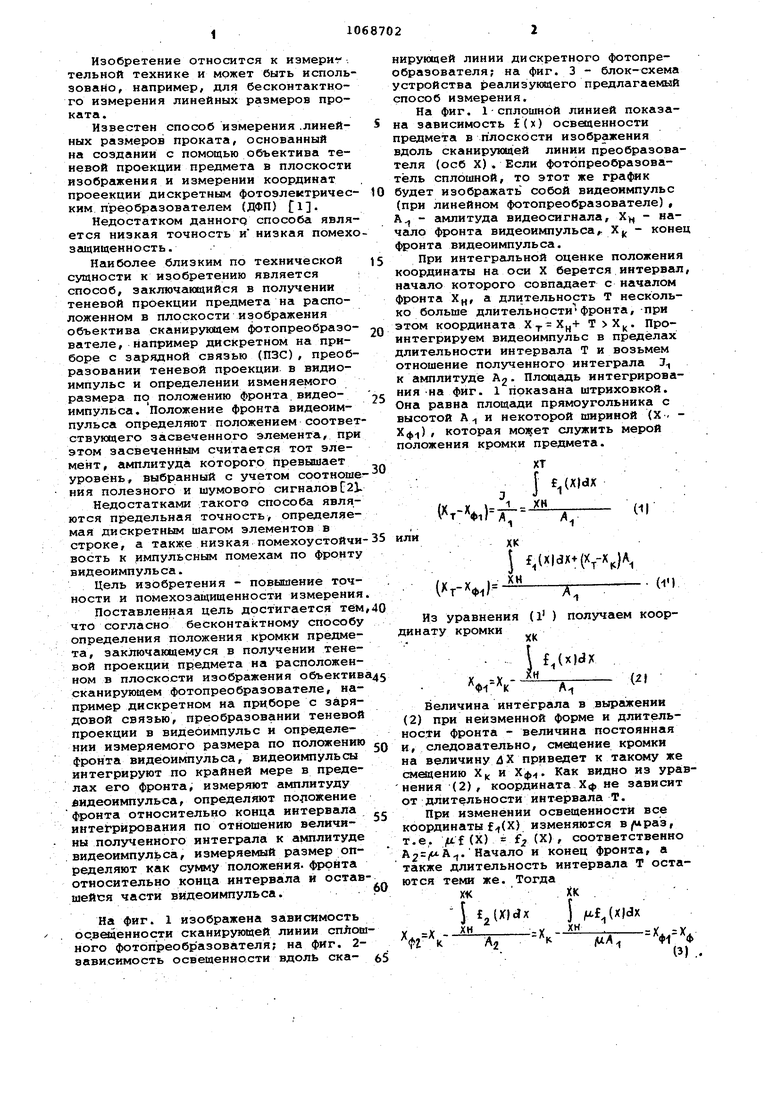
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптический способ диагностики поверхности | 1987 |
|
SU1619143A1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ГРАНИЦЫ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2157963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ГРАНИЦЫ ОБЪЕКТА | 2000 |
|
RU2172470C1 |
| Способ измерения положения объекта и устройство для его осуществления | 1982 |
|
SU1067352A1 |
| Способ измерения положения объекта | 1986 |
|
SU1348644A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРА И ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 1988 |
|
SU1828239A1 |
| Фотоселектор | 1986 |
|
SU1401493A1 |
| Теневой прибор | 1984 |
|
SU1173374A1 |
| Способ определения зоны с неравномерной освещенностью и устройство для его осуществления | 1986 |
|
SU1506272A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ В ДАТЧИКАХ С МНОГОЭЛЕМЕНТНЫМИ ПРИЕМНИКАМИ ИЗЛУЧЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2508524C2 |
БЕСКОНТАКТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КРОМКИ ПРЕДМЕТА, заключающийся в получении теневой проэкции предмета на расположенном в плоскости изображения о&ьектива сканирующем фотопреобразователе,например дискретном на приборе с зарядовой связью, преобразовании теневой проекции в видеоимпульс и определении измеряемого размера по положению фронта видеоимпульса, отличающ-и и с я тем, что, с целью повышения точности и помехозащищенности измерения, видеоимпульсы интегрируют по .крайней мере в пределах его фронта, измеряют амплитуду видеоимпульса, определяют положение фронта относительно конца интервала по отношению величины полученного интеграла к амплитуде видеоимпульса, измеряемый размер определяют как сумму положения фронта .относительно конца (Л интервала и оставшейся части видео- , импульса.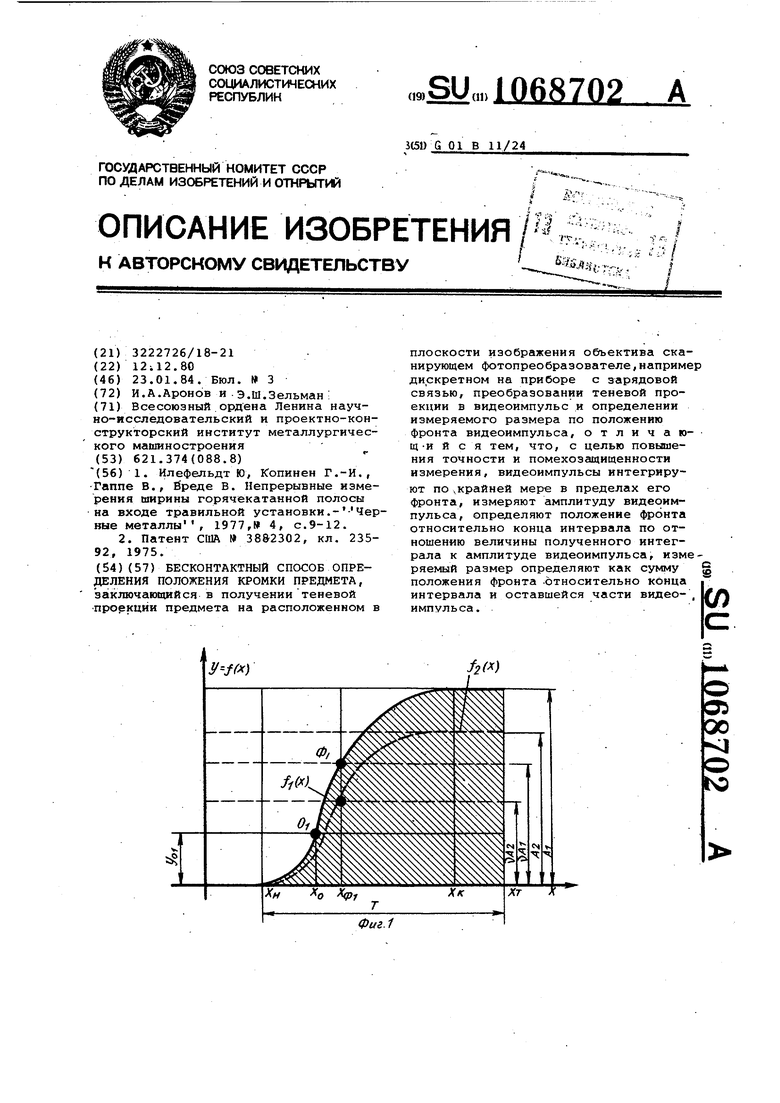
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Илефельдт Ю, Копинен Г.-И., Гаппе В., бреде В | |||
| Непрерывные измерения ширины горячекатанной полосы на входе травильной установки.--Черные металлы , 1977, 4, с.9-12 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Рубанок | 1929 |
|
SU23592A1 |
