Изобретение относится к области контрольно-измерительной техники и может быть использовано для бесконтактного измерения контроля поверхностей, например, элементов воздушных судов.
Целью изобретения является повышение производительности и точности за счет исключения операций интегрирования и измерения амплитуды видеоимпульса и связанных с ними погрешностей.
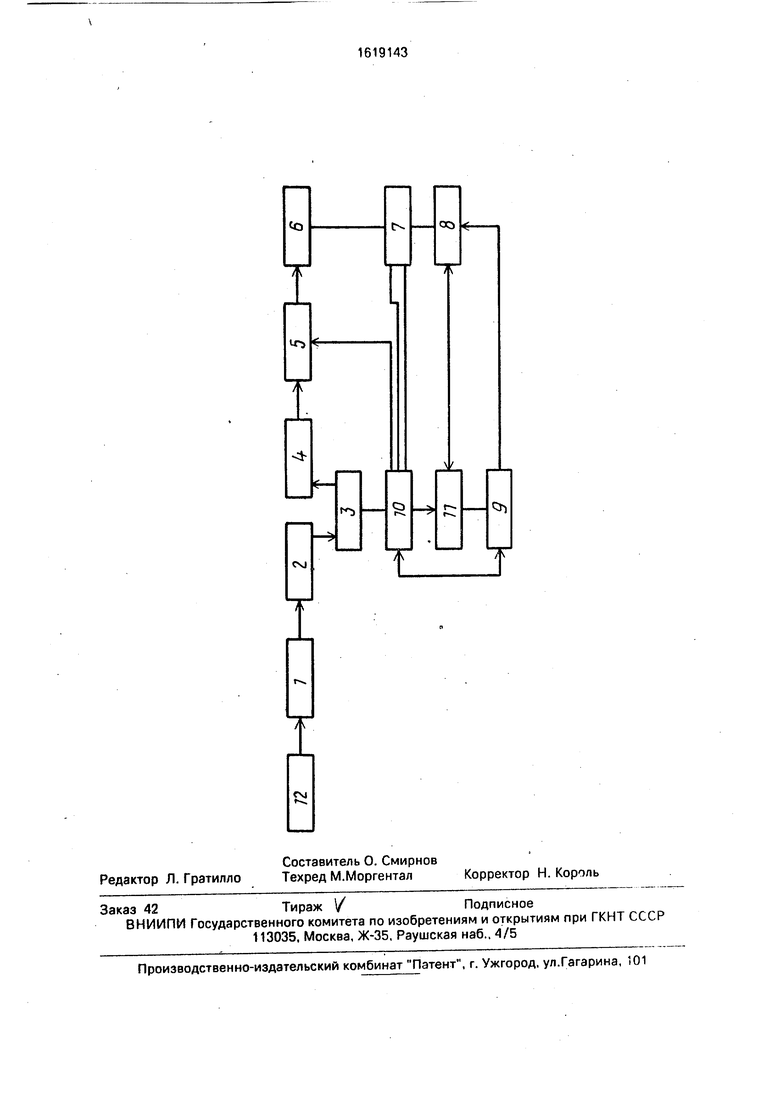
На чертеже представлена блок-схема устройства для реализации способа.
Оптический способ диагностики поверхности заключается в том, что получают теневую проекцию поверхности на расположенном в плоскости изобретения объективе сканирующим фотопреобразователем, например, на приборах с зарядовой связью, преобразуют теневую проекцию в видеоимпульс, по положению фронта видеоимпульса определяют путем интерполяции координаты хс, ус границы теневой проекции на плоскости фотопреобразователя по формулам
Х1 + Х2
хс
„ - У1 + У2 . ус2,
(1)
где XL /i - координаты, соответствующие началу фронта видеоимпульса;
Х2, У2 - координаты, соответствующие концу фронта и видеоимпульса.
По координатам хс, Ус определяют, используя известные соотношения геометрической оптики, координаты поверхности, сравнивают полученные значения координат поверхности с рассчитанными заранее их эталонными значениями в реперных точках, по результатам сравнения осуществляют диагностику.
О
ю
Ј
со
Устройство содержит длиннофокусный объектив 1, расположенные вдоль его оптической оси светофильтр 2 и фотопреобразователь 3, установленный в плоскости изображения объектива 1, последовательно соединенные видеоусилитель 4, входом подключенный к фотопреобразователю 3, блок 5 выборки и хранения, усилитель б, вычислитель 7 координат, интерфейс 8, блок 9 вычислений, генератор 10 тактовых импульсов и блок 11 выдачи команд, выходы которого соединены соответственно с вторыми входами интерфейса 8 и блока 9 вычислений, а выходы генератора 10 тактовых импульсов соединены соответственно с управляющими входами фотопреобразователя 4, блока 5 выборки и хранения и вычислителя 7 координат.
Устройство работает следующим образом.
Теневое изображение границ исследуемой поверхности 12 проецируется длиннофокусным объективом 1 на оптический вход фотопреобразователя 3 через светофильтр 2. Светофильтр 2 пропускает проецируемое изображение об исследуемой поверхности на заданной длине волны. Световой поток, содержащий в себе информацию о координатах исследуемой поверхности 12, попадая на фотопреобразователь 3, выполненный, например, на ПЗС, преобразуется в электрический сигнал - зарядовый пакет. Управление выходным сигналом с фотопреобразователя 3 осуществляется генератором 10 тактовых импульсов, который позволяет регулировать длительность импульсных сигналов, одновременно и в равной степени сохраняя все канальные и межканальные соотношения путем изменения лишь одного параметра. Электрический .сигнал снимается с выходного регистра фотопреобразователя 3 и после усиления видеоусилителем 4 поступает в блок 5 выборки и хранения, который служит для выделения и хранения полезного сигнала.
Далее сигнал усиливается усилителем 6 и подается на вычислитель 7 координат, который преобразует информационный сигнал, соответствующий определенному номеру ячейки ПЗС фотопреобразователя 3, вычисленный по формуле (1) в двоичный код. Сигнал с вычислителя 7 координат через интерфейс 8 поступает в блок 9 вычислений, выполненный, например, на основе процессора типа Электроника - 60, где происходит сравнение преобразованных
величин реальных координат исследуемой поверхности с эталонными значениями координат теоретического профиля, рассчитанными заранее и заложенными в память блока 9 вычислений. Блок 11 выдачи команд
согласует работу блока 9 вычислений с остальными элементами устройства.
Таким образом, определение положения фронта видеоимпульса с помощью интерполяции по формулам (1) позволяет
исключить из процесса диагностики операции интегрирования и измерения амплитуды видеоимпульса, что, в конечном итоге, приводит к повышению точности определения координат исследуемой поверхности и
повышению производительности диагностики. Способ позволяет также осуществить в устройстве, его реализующем (на основе ЭВМ), измерение координат поверхности в реальном масштабе времени.
Формула изобретения Оптический способ диагностики поверхности, заключающийся в том, что получают теневую проекцию поверхности на расположенном в плоскости изображения сканирующем фотопреобразователе, преобразуют теневую проекцию в видеоимпульс, определяют координаты поверхности по положению фронта видеоимпульса, отличающ и и с я тем, что, с целью повышения производительности и точности, по положению фронта видеоимпульса путем интерполяции определяют координаты хс и ус границы теневой проекции на плоскости фотопреобразователя по формулам
xi + х2 У1 + у2 Хс2 с2
где xi,yi-координаты, соответствующие началу фронта видеоимпульса;
Х2, У2 - координаты, соответствующие концу фронта видеоимпульса, используя значения хс, ус, определяют координаты поверхности в реперных точках. сравнивают их с эталонными значениями и
по результатам сравнений осуществляют диагностику.
I П
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный способ определения положения кромки предмета | 1980 |
|
SU1068702A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ЦВЕТОВОГО ОБРАЗЦА В ЗАДАННОМ НАПРАВЛЕНИИ ЦВЕТОВОГО ПРОСТРАНСТВА | 2013 |
|
RU2552011C2 |
| СПОСОБ СУБПИКСЕЛЬНОГО КОНТРОЛЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ УДАЛЕННОГО ОБЪЕКТА | 2012 |
|
RU2506536C2 |
| Способ бесконтактного измерения угловой ориентации объекта | 2017 |
|
RU2667343C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ВЗРЫВА И ЭНЕРГЕТИЧЕСКИХ ХАРАКТЕРИСТИК БОЕПРИПАСА ПРИ ИСПЫТАНИЯХ | 2014 |
|
RU2570025C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ КООРДИНАТ ЭЛЕМЕНТОВ ФОТОШАБЛОНОВ | 1973 |
|
SU409251A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419068C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ И/ИЛИ ДЕФОРМАЦИЙ ОБРАЗЦА ПРИ ВЫСОКОТЕМПЕРАТУРНОМ ВОЗДЕЙСТВИИ НА НЕГО И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2665323C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ГРАНИЦЫ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2157963C1 |
| Устройство для формирования псевдоцветного изображения | 1989 |
|
SU1682786A1 |
Изобретение относится к контрольно- измерительной технике. Цель изобретения - повышение производительности и точности за счет исключения операций интегрирования и измерения амплитуды видеоимпульса и связанных с ними погрешностей. Диагностика осуществляется по результатам сравнения значений координат поверхности, оп- ределенных по положению фронта видеоимпульса, полученного в результате преобразования теневой проекции поверхности на плоскость сканирующего фотопреобразователя, с их эталонными значениями в реперных точках. Положительный эффект обеспечивается тем, что вначале по положению фронта видеоимпульса определяют путем интерполяции координаты границы теневой проекции на плоскости фотопреобразователя, которые затем пересчитывают в координаты поверхности, что позволяет обойтись без интегрирования видеоимпульса и без измерения его амплитуды 1 ил. ё
Т
C4J
I
1
т
Л
| Бесконтактный способ определения положения кромки предмета | 1980 |
|
SU1068702A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
