Изобретение относится к судостроению, в частности к системам автоматического управления судовой турбинной установкой.
Известна система автоматического управления судовой турбинной установкой имеющей турбины переднего и задне1-о хо до с иаровым кот.лом, содержащая последонагельио соединенные датчик оборотов, 11ерв|)|й сумматор, задатчик режимов, датчик скорости судна и комнаратор, выходы которого связаны соответственно с клапанами переднего и заднего ходов, а к входу подключен выход усилителя, два других выхода которого связаны с клапанами переднего и заднего ходов 1.
Однако эта система не способна обеснечить заданный режим работы турбинной установки при волнении моря.
Цель изобретения -обеспечение стабильпо1Ч) режима работы турбинной устаПО1ЖИ в условиях во;шения моря.
Поставленная цель достигается тем, что система автоматического управления судовой турбинной установкой, имеющей турбины переднего и заднего ходов с паровым котлом, содержап1.ая последовательно соединенные датчик оборотов, первый сумматор, задатчик режимов, датчик скорости судна и компаратор, выходы которого связань соответственно с клапанами переднего и задйего ходов, а к входу подключен выход усилителя, два других выхода которого связаны с клапанами переднего и заднего ходов снабжена последовательно соединенными датчиком глубины погружения, адаптивной моделью качки, блоком прогнозирования, регулятором и вторь м сум.матором, выход которого соединен с входом усилителя, а второй вход подключен к выходу аерво1о суммато)а, при это.м выход датчика глубины погружения связан с входом регулятора.
На чертеже представлепа блок-схема 11 р е д;1 а г а е .м о и си с те .м ы.
Система содержит задатчик 1 режи.мов, первьп1 сумматор 2, второй сум.матор 3, усилитель 4 хода, клапан 5 переднего хода, клапан 6 заднего хода, котел 7, турбину 8 переднего хода, турбину 9 заднего хода, датчик 10 оборотов, датчик 1 глубины погружения, адаптивную модель 12 качки, блок 13 прогноза, регулятор 4, компаратор 15, датчик 16 скорости судна. При -угом выход котла 7 через первые входы клапаиов 5 и б переднего и заднего хода соединен соответственно с турбинами 8 и 9 переднего и заднего хода, выходы которых через последовательно соединенные датчик 10 оборотов, второй вход нерво10 сум.матора 2, задатчик 1 режимов, датчик 16 скорости судна подключен к второму входу ко.мпаратора 15, первый и второй выходы которого соединены соответственно с вторыми входами клапанов 5 и 6 переднего и заднего хода, третьи входы которых подключены соответственно к нерво.му и второму
выходам усилителя 4, третий выход которого подключен к первому входу компаратора 15, первый вход регулятора 14 соединен с выходом датчика 11 глубины погружения и, через последовательно соединенные адаптивную модель 12 качки, блок 13 прогноза, второй вход регулятора 14, первый вход второго сумматора 3, подключен к входу усилителя 4, а второй вход второго сумматора 3 соединен с выходом первого сум.матора 2.
Работа системы заключается в следуюндем.
Параметры движения судна (число оборотов турбины, скорость движения и т. д.) задаются задатчиком 1 режимов. Сигнал в виде напряжения, соответствующего выбранному режиму от задатчика 1 режимов, поступает через первый вход первого сумматора 2 и второй вход второго сумматора 3 на вход усилителя 4, который управляет работой клапанов переднего 5 и заднего 6 ходов. Усилитель 4 имеет нелинейную характеристику с насыщением. Пар из котла 7 под определенным давлением подается через соответствующий клапан переднего 5 или заднего 6 ходов к турбинам переднего 8 или заднего 9 ходов. Валы турбин 8 и 9 соединены с датчико.м 10 числа оборотов. Напряжение, пропорциональное числу оборотов турбины 8 или 9, подается на второй вход первого сумматора 2, где сравнивается с напряжением, соответствующим заданному числу оборотов турбины 8 или 9. В процессе плавания судна в условиях волнения моря датчиком 11 глубины погружения измеряется глубина погружения винта. Сигнал измеренной глубины поступает на первый вход адаптивной модели 12 качки, на второй вход которой подается сигнал о параметрах качки судна с центрального гиропоста судна. Адаптивная модель 12 качки представляет собой генератор сигнала качки и все время вырабатывает сигнал глубины погружения винта таким образо.м, чтобы он совпадал с реальным сигналом от датчика 11 глубины погружения. Математическое описание адаптивной модели 12 качки имеет вид
Ьг, е(0) 0Н С
;i)
где - Г п-мерный вектор состояния адаптивной модели качки (12); матрица состояний размером п X п;
Н - глубина погружения винта; С - выходная матрица размером
1 X п.
Коэффициенты адаптивной модели 12 качки, т. е. элементы матриц Г и С, непрерывно подстраиваются до тех пор, пока выходной сигнал адаптивной модели 12 качки не совпадет с заданной точностью с текущим сигналом от датчика 11 глубины погружения. Технически адаптивная модель 12 качки в простейшем случае может быть реализована в виде генераторов синусоид, амплитуды и частоты которых можно перестраивать. Блок 13 прогноза прогнозирует глубину погружения винта на основании данных, поступающих на его вход с выхода адаптивной модели 12 качки. Конструктивно блок 13 прогноза в простейшем случае может быть обыкновенным интегрирующим устройством, которое в ускоренном масщтабе времени интегрирует дифференциальное уравнение (1), коэффициенты которого (т. е. элементы матриц Г и С), а также начальные условия снимаются с выхода адаптивной модели 12 качки. После интегрирования сигнал с выхода блока 13 прогноза, соответствующий прогнозируемой глубине погружения винта, поступает на второй вход регулятора 14, на первый вход которого подается сигнал о текущей глубине погружения винта с выхода датчика 11 глубины погружения. Регулятор 14 формирует сигнал «И комбинированного управления из двух своих входных сигналов и подает это управление на первый вход второго сумматора 3. Закон регулирования регулятора 14 может быть следующим: % н„ и К,Н + К,Нп CjH 3;ftL C, где GI и GI- постоянные весовые коэффициенты;Нр - прогнозируемая глубина поружения винта; Т - время прогноза; - средняя скорость изменения глубины погружения винта за время прогноза. Из выражения (2) видно, что такой регулятор реализует пропорционально-дифференциальный закон управления по возмущающему воздействию. Полученное в первом сумматоре 2 отклонение числа оборотов турбины от заданного поступает на второй вход второго сумматора 3, где происходит сложение с выходным сигналом регулятора 14. Рсзультируюпи1Й сигнал поступает на вход усилителя 4, где после усиления используется для управлепия клапанами переднего 5 или заднего 6 ходов, поступая на их третьи входы соответствепно с первого или второго выходов усилителя 4. При реверсе хода, папример с переднего на задний, в работу включается компаратор 15, конструктивно выполненный аналогично усилителю 4, но имеюпгпй релейную характеристику с зоной нечувствительности. Внутри зоны нечувствительности компаратора 15 управление работой клапанов 5 и 6 осуществляется через усилитель 4, как описано выше. В случае наеьпцепия усилителя 4 начинает работу компаратор 15. В зависимости от соотношения сигналов на первом и втором входах компаратора 15 появляются сигналы на его первом и втором выходах, этими сигналами клапан 5 переднего хода полностью закрывается, а клапан б заднего хода полностью открывается. Через открытый клапан 6 заднего хода подается максимально воз.можный пар в турбпну 9 заднего хода. Компаратор 15 отключается, те. переходит в зону нечувствительности, когда скорость судна вперед упадет, например, до известного малого значения и пока турбина 9 заднего хода не наберет соответствуюп1ее число оборотов. В этот момент спова вст пает в работу усилитель 4, которьп будет управлять клапанами переднего 5 и заднего 6 ходов. Для установки соответствующего режима на вход задатчика 1 режимов поступает си1нал от датчика 16 скорости судна с его другого выхода, тем самым система управления турбиной замыкается и по скорости движения судна. Таким образом, регулирование системы по отклонению скорости врап1еиия турбины от заданной и по возмунгению от качки судн-а обеспечивает стабильность работы ту-рбинной установки в условиях волнения моря.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ СУДОВОЙ ПАРОТУРБИННОЙУСТАНОВКИ | 1966 |
|
SU185225A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СУДОВОЙ ПАРОТУРБИННОЙУСТАНОВКИ | 1966 |
|
SU185721A1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1967 |
|
SU194844A1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Автоматическая и дистанционная система для управления судовым двигателем внутреннего сгорания | 1982 |
|
SU1078116A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДОВОЙ ТУРБИННОЙ УСТАНОВКОЙ, имеющей турбины переднего и заднего ходов с паровым котлом, содержащая последовате.пьно соединенные датчик оборотов, первый сум.матор, задатчик режимов, датчик скорости судна и компаратор, выходы которого связаны соответственно с клапанами переднего и заднего ходов, а к входу подключен выход усилителя, два других выхода которого связаны с клапанами переднего и заднего ходов, отличающаяся тем, что, с целью обеспечения стабильного режима работы турбинной установки в условиях волнения моря, она снабжена последовательно соединенными датчиком глубины погружения, адаптивной моделью качки, блоком прогнозирования, регуляторо.м и вторым сумматором, выход которого соединен с входом усилителя, а второй вход подключен к выходу первого сумматора, при этом выход датчика глубины погружения связан с входо.м регулятора.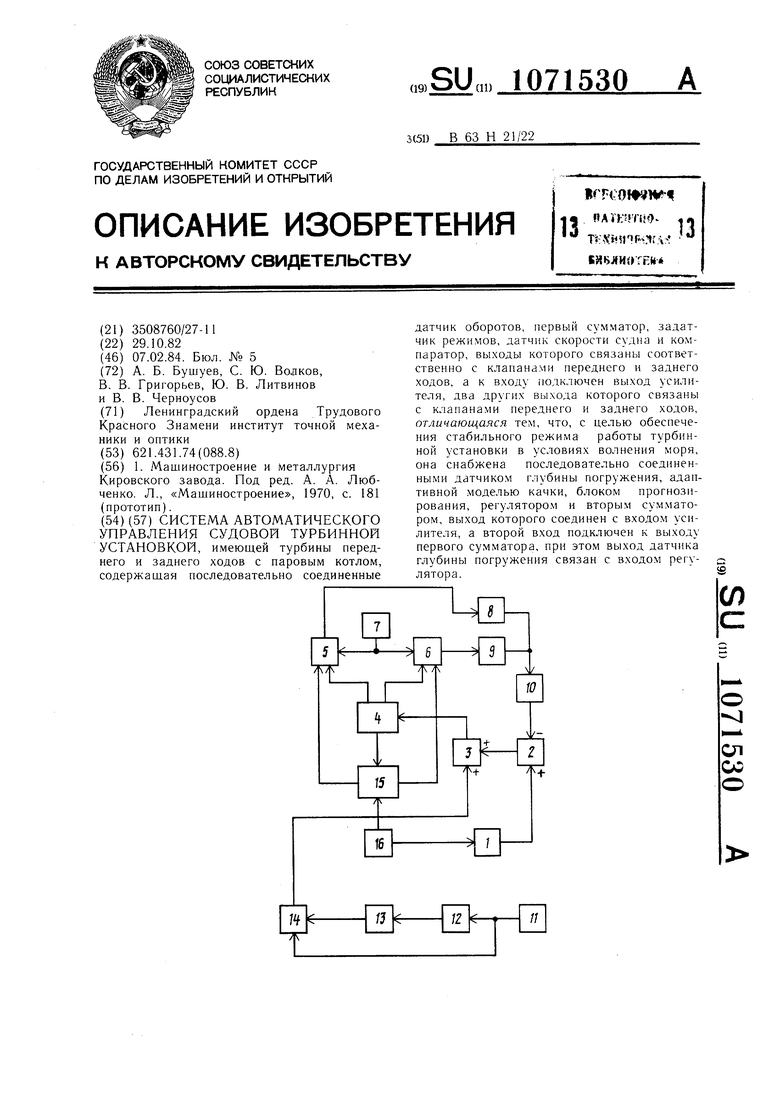
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машиностроение и металлургия Кировского завода | |||
| Под ред | |||
| А | |||
| А | |||
| Любченко | |||
| Л., «Машиностроение, 1970, с | |||
| Водяные лыжи | 1919 |
|
SU181A1 |
