Изобретение относится к судостроению, в частности к системам для передачи грузов между судами в море в условиях качки.
Цель изобретения - повышение эффек- тивнрсти работы устройства nyfeM обеспечения безударной передачи груза за счет слежения грузовой тел.ежки за мачтами передающего и принимающего судов.
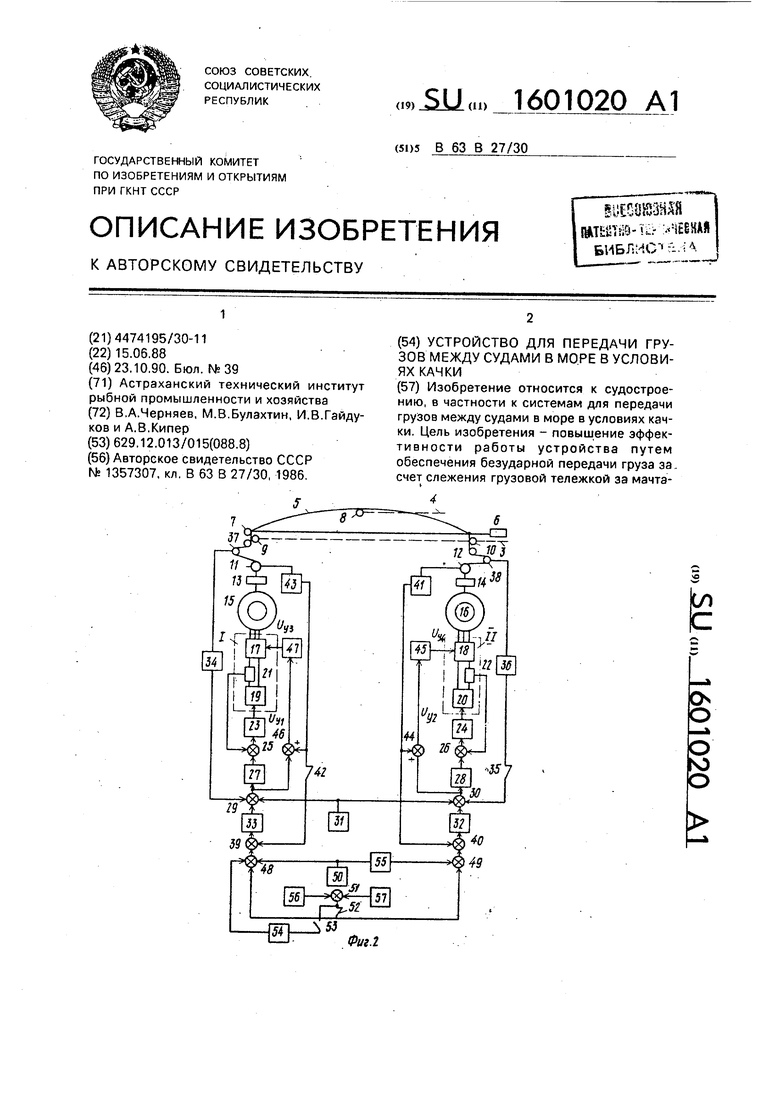
На фиг. 1 изображена кинематическая схема предлагаемого устройства; на фиг. 2 - функциональная схема устройства.
Устройство для передачи грузов между передающим 1 и принимающим 2 суднами содержит мачты 3 и 4, между которыми натянуты ветви каната 5. Груз находится в тележке 6, соединенной с блоком 7, перемещающимся по верхней ветви каната 5. и жестко связанной с нижней ветвью каната, петля которого огибает блок -8 на мачте 4 принимающего судна 2, а два конца, огибающие блоки 9 и 1,0 н а мачте 3 передающего судна 1, соединены с тяговыми лебедками 11 и 12. Последн ие через редукторы 13 и 14 соединены со своими электродвигателями 15 и 16 переменного тока, которые подключены к автономным инверторам 17 и 18тока преобразователей 1 и II частоты. Автономные инверторы 17 и 18 получают питание от управляемых выпрямителей 19 и 20 тех. же преобразователей I и И частоты через датчики 21 и 22 тока. Входы управляемых выпрямителей 19 и 20 через регуляторы 23 и
24тока соединены с выходами сумматоров
25и 26 регуляторов тока, к первым входам которых подключены выходы регуляторов 27 и 28 натяжения, а к вторым входам - выходы датчиков 21 и 22 тока. Входы регуляторов 27 и 28 натяжения связаны с выходами сумматоров 29 и 30 регуляторов натяжения, входы последних связаны с выходами задатчика 31 натяжения, регуляторов 32 и 33 скорости перемещения, датчика 34 натяжения верхней ветви каната и через
нормально закрытый контакт 35 с выходом датчика 36 натяжения нижней ветви каната. Датчики-34 и 36 натяжения ветвей каната через блоки 37 и 38 связаны с ветвями каната. Выходы сумматоров 39 и 40 регуляторов скорости соединены с входами регуляторов 33 и 32, а входы этих сумматоров соединены с выходом датчика 41 скорости нижней ветви каната и через нормально закрытый контакт 42 с выходом датчика 43 скорости верхней ветви каната. Кроме того, выход Датчика 41 скорости нижней ветви каната связан с одним из входов сумматора 44 регулятора 45 частоты, а выход датчика 43
скорости верхней ветви каната соединен с одним из входов сумматора 46 регулятора 47 частоты. Выходы регуляторов 45 и 47 частоты подключены к автономным инверторам 18.И 17 тока. Два других входа сумматоров 44 и 46 регуляторов частоты связаны с выходами сумматоров 30 и 29 регуляторов 28 и 27 натяжения. Вторые входы сумматоров 39 и 40 соединены с выходами дополнительных сумматоров 48 и 49 регуляторов
скорости. Сумматор 48 подключен своим входом к выходу задатчика 50 сигналов перемещения. Выход сумматора 51 сигналов датчиков скорости качки через нормально замкнутый контакт 52 подключен к входам
дополнительных сумматоров 49 и 48 регуляторов скорости, а через нормально открытый контакт53 - к входу усилителя 54,выход которого соединен с входом сумматора 48 регулятора скорости. Вход инвертора 55
связан с выходом задатчика 50 сигналов перемещения, а его выход - с входом дополнительного сумматора 49 регулятора скорости. Датчики 56 и 57 скорости качки точек подвеса подключены к сумматору 51.
Контакты 35, 42. 52 и 53 сблокированы так, что при замыкании контакга 53 контакты 35, 42 и 52 размыкаются.
. Устройство передачи грузов между судами имеет изменяющуюся структуру, обеспечивающую слежение грузовой тележки за мачтой передающего или принимающего судна в зависимости от положения грузовой тележки.
При нахождении грузовой тележки в зоне передающего судна контакт 53 замкнут а контакты 35,42 и 52 разомкнуты и система работает следующим образом. В исходном состоянии сигналы управления Uyi и Uy2 на входе управляемых выпрямителей 19 и 20 сигналы управления Ууз и Uy4 на входе автономных инверторов 17 и 18 равны 0,5. Напряжение управляемых выпрямителей и частоты автономных инверторов равны нулю. Электродвигатели 15 и 16 неподвижны и натяжение на контактной дороге равно нулю.
Задание натяжения производится подачей задающего сигнала задатчиком 31 натяжения на входы сумматоров 29 и 30 и далее на входы регуляторов 27 и 28 натяжения, а также через сумматоры 46 и 44 на регуляторы 47 и 45 частоты. Выходное напряжение регуляторов 27 и 28 натяжения подается на входы сумматоров 25 и 26 и далее на входы соответствующих регуляторов 23 и 24 тока. Выходное напряжение регуляторов 47 и 45 частоты подается на входы соответствующих инверторов 17 и 18 тока. В результате на выходе управляемых выпрямителей появляется положительное напряжение, которое в автономных инверторах 17 и 18 тока преобразуется в переменный ток определенной частоты. При этом частоты инверторов 17 и 18 тока положительны, что соответствует двигательному режиму работ электродвигателей 15 и 16. Величина тока инверторов благодаря действию обратных связей в каждом токовом контуре практически мгновенно устанавливается равной заданной от статической погрешностью на входах. Электродвигатели 15 и 16 начинают вращаться в разные стороны, выбирая слабину каната. Как только электродвигатель 16 нижней ветви каната начнет вращаться, с выхода датчика 41 скорости перемещения через сумматор 40, регулятор 32 скорости перемещения на вход сумматора 30 поступает отрицательный сигнал, пропорциональный скорости вращения электродвигателя 16. В результате сигнал на входе регулятора 28 натяжения и на входе сумматора 44 регулятора частоты 45 уменьшается, электродвигатель 16 останавливается, и дальнейшая выборка сла- .бины каната осуществляется электродвигателем 15 при практически неподвижном электродвигателе 16.
По мере работы электродвигателя 15 увеличивается натяжение ветвей каната и увеличивается сигнал на выходе датчика 34
5
натяжения верхней ветви каната, сигнал разбаланса на выходе регулятора 27 натяжения уменьшается. В установившемся режиме электродвигатели находятся под 5 током при минимальной частоте и развивают одинаковые тяговые усилия, равные заданному натяжению.
Для задания скорости перемещения грузовой тележки в направлении принима- 10 ющего судна задатчиком 50 сигнала перемещения подается натяжение на вход дополнительного сумматора 48 и на вход инвертора 55. На выходе последнего сигнал мeняeY свой знак и подается на вход допол- 15 нительного сумматора 49. Таким образом на сумматоры 48 и 49 и далее через сумматоры 39 и 40 регуляторов 33 и 32 скорости на сумматоры 29 и 30 регуляторов 27 и 28 натяжения подаются два сигнала одинаковой ве- 20 личины, но противоположной полярности. В результате этого суммарный сигнал на вы- ходе сумматора 29 увеличивается, а на выходе сумматора 30 уменьшается. При этом увеличивается сигнал управления на выходе 25 управляемого выпрямителя 19 и уменьшает- , ся сигнал управления на входе управляемого выпрямителя 20. Одновремено на входе сумматора 46 и далее на входе инвертора 17 тока увеличивается сигнал управления, а на 0 входе сумматора 44 и далее на входе инвертора 18 тока уменьшается сигнал управления. В результате увеличивается частота и ток инвертора 17 тока, а следовательно, и момент стоянки электродвигателя 15, а так- 5 же уменьшается (и даже становится отрицательной) частота инвертора 18 тока и напряжения управляемого выпрямителя 20, следовательно, уменьшается момент стоянки электродвигателя 16. Напряжение в вет- 0 ви каната, связанной с электродвигателем 15, увеличивается, а натяжение в ветви каната, связанной с электродвигателем 16, уменьшается.
Как только усилие в ветви каната элект- родвигателя 15 становится больше усилия в ветви каната электродвигателя 16 и достаточным для прокручивания лебедки q сторону травления, начинается перемещение тележки 6 в направлении принимающего судна 2. Электродвигатель 15 продолжает работать в двигательном режиме, а электродвигатель 16 под действием тягового усилия электродвигателя 15 начинает вращаться в обратную сторону и работать в генератор- ном режиме, рекуперируя энергию торможения в электрическую сеть с помощью автономного инвертора 18 тока и управляемого выпрямителя 20, перешедшего в режим ведомого инвертора. В процессе перемещения грузовой тележки, благодаря
действию контура регулирования натяжения верхней ветви каната, включающей датчик 34 натяжения, сумматор 29 и регулятор 27 натя- , эле1стродвигатель 15 имеет мягкие характеристики, обеспечивающие поддержание величины натяжения в ветвях каната, равного заданному задатчиком 31 натяжения. В то же время, благодаря действию контура регулирования скорости нижней ветви каната, включающегодатчик 41 скорости, сумматоры 40 и 44, регулятор 32 скорости и регулятор 45 частоты, электродвигатель 16 имеет жесткие характеристики, обеспечивающие поддержание величины скорости нижней ветви каната равной заданной задатчиком 50 перемещения. Таким образом обеспечивается перемещение грузовой тележки с постоянной скоростью относительно мачты передающего судна при неизменном напряжении в ветвях каната.
Изменение направления движения тележки 6 осуществляется изменением полярности сигнала задатчика 50 перемещения. В этом случае злектродвигатель 16 переходит работать в двигательный режим, а электродвигатель 15 - в генераторный и осуш,еств- ляет рекуперацию знергии в сеть.
Для безударной передачи грузов в усло- ВИЯХ качки при нахождении грузовой тележки в зоне передающего судна скорость перемещения грузовой тележки относительно мачты передающего судна поддерживается постоянной независимо от качки судов, т.е. осуществляется слежение тележкой за-мачтой передающего судна.
Например, при дв14жении- грузовой тележки к передающему судну сигнал задания скорости, снимаемы й с задатчика 50 перемещения, отрицательный, электродвигатель 16 pa6oTaef в двигательном режиме и определяет скорость перемещения грузовой тележки относительно передающего судна. Электродвигатель 15 работает в генераторном режиме и задает тормозное усилие на валу электродвигателя 16, равное заданному натяжению.
При отработке отклонения мачты передающего судна влево на выходе датчика 56 скорости качки появляется отрицательный сигнал, пропорциональный скорости качки. Этот сигнал через сумматор 51, контакт 53 поступает на усилитель 54. С выхода последнего усиленный сигнал, пропорциональный удвоенной скорости передающего .судна, подается на вход сумматора 48, что приводит к увеличению отрицательного сигнала на выходе регулятора 33 скорости и уменьшению сигналов управления на выходах регулятора 23 тока и регулятора 47 частоты. В результате ток электродвигателя 15 уменьшается, а частота инвертора 17 тока увеличивается. Ток электродвигателя 16 и частота инвертора 18 тока не изменяются. Натяжение верхней ветви каната, связанной с элек- тродвигателем 15, уменьшается, а скорость травления зтой ветви каната, обусловленная скоростью нижней ветви каната и скоростью качки передающего судна, увеличивается. Суммарное натяжение в ка- 0 нате, создаваемое качкой и электродвигателями, остается практически равным заданному. Скорость электродвигателя 16 и нижней ветви каната, связанной с ним, остается неизменной. Следовательно, 5 скорость грузовой тележки относительно мачты передающего судна не изменяется.
При отработк е отклонения мачты принимающего судна влево на выходе датчика 57 скорости качки появляется положитель- 0 ный сигнал, пропорциональный скорости качки принимающего судна. Этот сигнал через сумматор 51, контакт 53 подается на вход усилителя 54. С выхода последнего усиленный сигнал, пропорциональный удвоен- 5 ной скорости качки принимающего судна, подается на вход сумматора 48, что приво- дит к уменьшению отрицательного сигнала на выходе регулятора 33 скорости и увеличению сигналов управления на выходах ре- 0 гулятора 23 тока и регулятора 47 частоты, на выходах сумматоров 34 и 46 сигналы увеличиваются, а сигналы На выходах сумматоров 25 и 44 не изменяются. Увеличение сигнала на выходе сумматора 25 приводит к увели- 5 чению сигнала управления на входе преобразователя 19 и, следовательно, к уменьшению напряжения тиристорного преобразователя 19, работающего инвертором. Напряжение тиристорного преобразо- 0 вателя 20 не изменяется. В результате ток электродвигателя 15 увеличивается, а частота инвертора 17 тока уменьшается. Ток электродвигателя 16 и частота инвертора 18 тока остается неизменной. Натяжение верхней 5 ветви каната, связанной с электродвигателем 15, увеличивается, а скорость травления этой ветви каната, обусловленная скоростью нижней ветви каната и скоростью качки передающего судна, уменьшает- 0 ся. Суммарное натяжение в канате, создаваемое качкой и электродвигателями, -остается практически равным заданному. Скорость электродвигателя 16 и нижней ветви каната, связанной с ним, остается неиз- 5 менной. Следовательно скорость грузовой дележки относительно мачты передающего судна не изменяется.
Аналогично отрабатывается отклонение принимающего и передающего судов вправо и совместная качка обоих судов.
При входе грузовой тележки в зону принимающего судна размыкается контакт53 и замыкаются контакты 35, 42 и 52. При этом выход суммматора 51 подключается к входам сумматоров 48 и 49, выход датчика 43 скорости подключается к входам сумматора 39 и 46, а выход датчика 36 натяжения - к входу сумматора 30. При нахождении грузовой тележки в зоне принимающего судна электродвигатели 15 и 16 имеют мягкие механические характеристики. В установившемся режиме точки совместной работы электродвигателей определяются пересечением механических характеристик двигательного и тормозного (генераторного) режимов.
Для безударной передачи грузов в условиях качки при нахождении грузовой тележки в зоне принимающего судна скорость перемещения грузовой тележки относительно мачты принимающего судна поддерживается постоянной независимо от камки судов.
Например, при движении грузовой тележки к принимающему судну сигнал задания скорости, снимаемый с задатчика 50 перемещения, положительный. Электродвигатель 15 работает в двигательном режиме, а электродвигатель 16 - в генераторном.
При отработке отклонения мачты передающего судна влево на выходе датчика 56 скорости качки появляется отрицательный сигнал, пропорциональный скорости качки. Этот Сигнал через сумматор 51, контакт 52 подается на входы сумматоров 48 и 49, что приводит к увеличению отрицательного сигнала на выходе регулятора 32 скорости и уменьшению положительного сигнала на выходе регулятора 33 скорости. Сигналы управления на выходах регуляторов 24 и 23 тока и регуляторов 45 и 47 частоты уменьшаются. В результате ток электродвигателя 16 уменьшается, а частота инвертора 18 тока увеличивается. Ток электродвигателя 15 также уменьшается, частота инвертора 17 тока уменьшается. Натяжение нижней ветви каната, связанной с электродвигателем 16, и натяжение верхней ветви каната, связанной с электродвигателем 15, уменьшаются. Суммарное натяжение в канате, создаваемое качкой и электродвигателями, остается практически равным заданному. Скорость электродвигателя 16 и скорость травления нижней ветаи каната, связанной с ним, увеличиваются, и скорость электродвигателя 15 и скорость выбирания верхней ветви каната, связанной с ним, уменьшают- .ся на одну и ту же величину.Следовательно,и скорость грузовой тележки относительно
мачты принимающего судна остается неизменной.
При отработке отклонения мачты принимающего судна влево на выходе датчика 5 57 скорости качки появляется положительный сигнал, пропорциональный скорости качки. Этот сигнал через сумматор 51, контакт 52 подается на входы сумматоров 48 и 49, что приводит к увеличению положитель- 10 ного сигнала на выходе регулятора 33 скорости и уменьшению отрицательного сигнала на выходе регулятора 32 скорости. Сигналы управления на выходах регуляторов 23 и 24 тока и регуляторов 45 и 47 час- 15 тоты увеличиваются. В результате ток электродвигателя 15 и частота инвертора 17 тока увеличиваются. Ток электродвигателя 16 также увелич шается, а частота инвертора 18 тока уменьшается. Натяжение верх- 20 ней ветви каната, связанной с электродвигателем 15, и натяжение нижней ветви Каната, связанной с электродвигателем 16, увеличиваются. Суммарное натяжение в канате, создаваемое качкой и 5 электродвигателями, остается практически .равным заданному. Скорость электродвигателя 15 и скорость выбирания верхней ветви каната, связанной с ним, увеличиваются, а скорость электродвигателя 16 и ско- 0 рость трав ления нижней ветви каната, связанной с ним, уменьшаются на одну и ту же величину. Следовательно, и скорость грузовой тележки относительно мачты принимающего судна остается неизменной. 5 Аналогично отрабатывается отклонение принимающего и передающего судна вправо и совместная качка обоих судоп.
Переключение режимов работы устройства передачи грузов целесообразно произ- 0 водить при нахождении грузовой тележки в середине пролета. В этом случае ее скорость успеет прийти к заданному установившемуся значению. Кроме того, оператор, управляющий передачей груза, имеет необ- 5 ходимое время для оценки обстановки. Формула изобретения Устройство для передачи грузов между судами в море в условиях качки, содержащее ветви каната, заведенные на дЕзе тяго- 0 вые лебедки, связанные с асинхронными электродвигателями через редукторы, грузовую тележку, прикрепленную к одной ветви и кинематически связанную с другой ветвью, а также электронный узел управле- 5 ния режимом работы электродвигателей, выполненный с задатчиком перемещения, инвертором, задатчиком натяжения, а также двумя электрическими цепями, каждая из которых включает в себя автономный ин- вертор. выходы которого соединены с соответствующим асинхронным электродвигателем, датчик тока,-управляемый выпрямитель, первый выход которого соединен через датчик тока с первым входом автономного инвертора, второй вход которого соединен с вторым выходом этого выпрямителя, регулятор тока с сумматором, соединенный выходом с входом выпрямителя, регулятор натяжения, соединенный выходом с первым входом сумматора регулятора тока, второй вход которого соединен с выходом датчика тока, регулятор частоты с сумматором, соединенный выходом с третьим входом автономного инвертора, сумматор регулятора натяжения, соединенный выхо- дом с входом регулятора натяжения и первым входом сумматора регулятора частоты, регулятор скорости перемещения с сумматором, соединенный выходом с первым входом сумматора регулятора натяжения, датчик натяжения и датчик скорости, кинематически связанные с соответствующей ветвью каната, причем выход датчика скорости соединен с вторым входом сумматора регулятора частоты тока, при этом упомяну- тый задатчик натяжения связан выходом с вторыми входами сумматоров регуляторов натяжения обеих электрических цепей, выход задатчика сигнала перемещения соединен с входом инвертора, выход датчика натяжения в первой электрической цепи связан с третьим входом суммэто ра регулятора натяжения, вторые входы сумматоров регулятора скорости перемещения и регуля/S
тора частоты тока соединены между собой, отличающееся тем, что, с целью повышения эффективности работы устройства путем обеспечения безударной передачи груза за счет слежения грузовой тележки за мачтами передающего и принимающего судов, электронный узел управления выполнен с нормально разомкнутым контактом и кинематически связанными с ним тремя нормально замкнутыми контактами, усилителем, двумя дополнительными сумматорами регуляторов скорости перемещения и датчиками скорости качки с сумматором их сигналов, причем в первой электрической цепи вторые входы сумматоров регулятора частоты тока и регулятора скорости перемещения соединены между собой через первый нормально замкнутый контакт, а во второй электрической цепи через второй нормально замкнутый контакт соединен выход датчика натяжения с третьим входом регулятора натяжения, выход сумматора сигналов датчиков скорости качки связан через третий нормально замкнутый контакт с первыми входами дополнительных сумматоров, вторые входы которых соединены соответственно с выходом задатчика сигнала перемещения и выходом инвертора, выходы этих дополнительных сумматоров связаны с третьими входами сумматоров регуляторов скорости перемещения соответственно первой и второй электрических цепей, а третий вход первого дополнительного сумматора соединен с выходор 1 усилителя.
/S

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1986 |
|
SU1357307A1 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
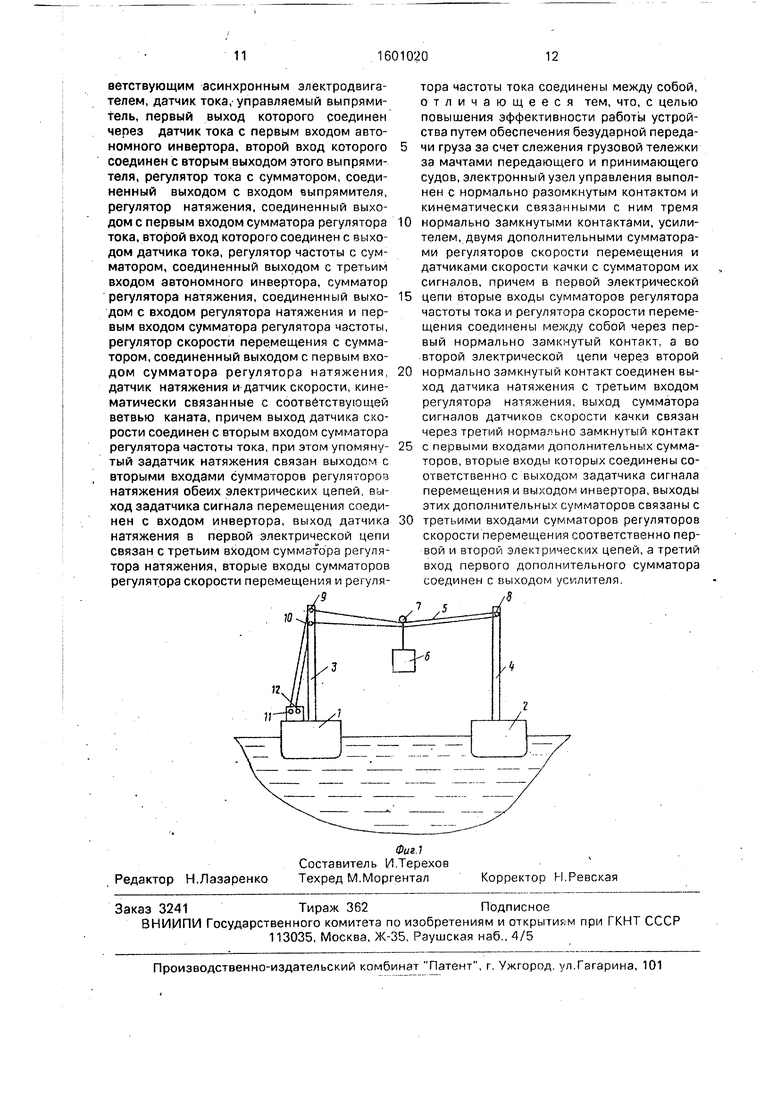
Изобретение относится к судостроению, в частности, к системам для передачи грузов между судами в море в условиях качки. Цель изобретения повышение эффективности работы устройства путем обеспечения безударной передачи груза за счет слежения грузовой тележкой за мачтами передающего и принимающего судов. Устройство для передачи грузов между передающим и принимающим суднами содержит мачты 3 и 4, между которыми натянуты ветви каната 5, грузовую тележку 6, соединенную с блоком 7, перемещающимся по верхней ветви каната 5, и жестко связанную с нижней ветвью каната, петля которого огибает блок 8 на мачте 4 принимающего судна, а два конца, огибающие блоки 9 и 10 на мачте 3 передающего судна, соединены с тяговыми лебедками 11 и 12, связанными через редукторы 13 и 14 со своими асинхронными электродвигателями 15 и 16 переменного тока, и электронный узел управления режимом работы этих электродвигателей. В этом электронном узле содержатся, в частности, датчики скорости качки, а также нормально разомкнутый контакт и кинематически связанные с ним три нормально замкнутых контакта, обеспечивающих изменение электронного узла в зависимости от положения тележки. 2 ил.