Изобретение относится к судостроению, в частности к устройствам для v передачи грузов между судами в море в условиях качки.
Известно устройство для передачи грузов между судами в море в условиях качки, содержащее ветви каната, заведенные на две тяговые лебедки, связанные с электродвигателями постоянного тока, грузовую тележку, прикрепленную к одной из ветвей каната и кинематически связанную с другой ветвью, а также электронный узел управления режимом работы электродвигателей, включающий первый и второй датчики натяжения ветвей каната, входы которых связаны с ветвями каната, первый и второй тиристорные преобразователи, подключенные к якорям первого и второго электродвигателей соответственно, первый и второй регуляторы натяжения ветвей каната, выходы которых подключены, ко входам первого и второго тиристорных преобразователей соответственно,первый и второй сумматоры регуляторов натяжения, выходы которых подключены ко входам первого и второго регуляторов натяжения соответственно, причем выходы датчиков натяжения
и выход задатчика сигналов натяжения подключены ко входам первого и второго сумматоров регуляторов натя-i жения соответственно Г1.
Недостатком известного устройства является недостаточная надежность его работы.
Цель изобретения - повьшение надежности работы устройства путем по10лучения стабильных скоростей перемещения грузовой тележки при подходе к приемному устройству передающего или принимающего судна.
Указанная цель достигается тем,
15 что электронный узел управления режимом работы электродвигателей снабжен контуром регулирования скорости перемещения грузовой тележки, включающим первый и второй датчики скорости
20 ветвей каната, кинематически связанные с ветвями каната, первый и второй регуляторы скорости ветвей каната, выходы которых подключены ко входам сумматоров первого и второго
25 регуляторов натяжения ветвей катана соответственно, первый и второй сумматоры регуляторов скорости, причем входы регуляторов скорости связаны соответственно выходами сумматоров
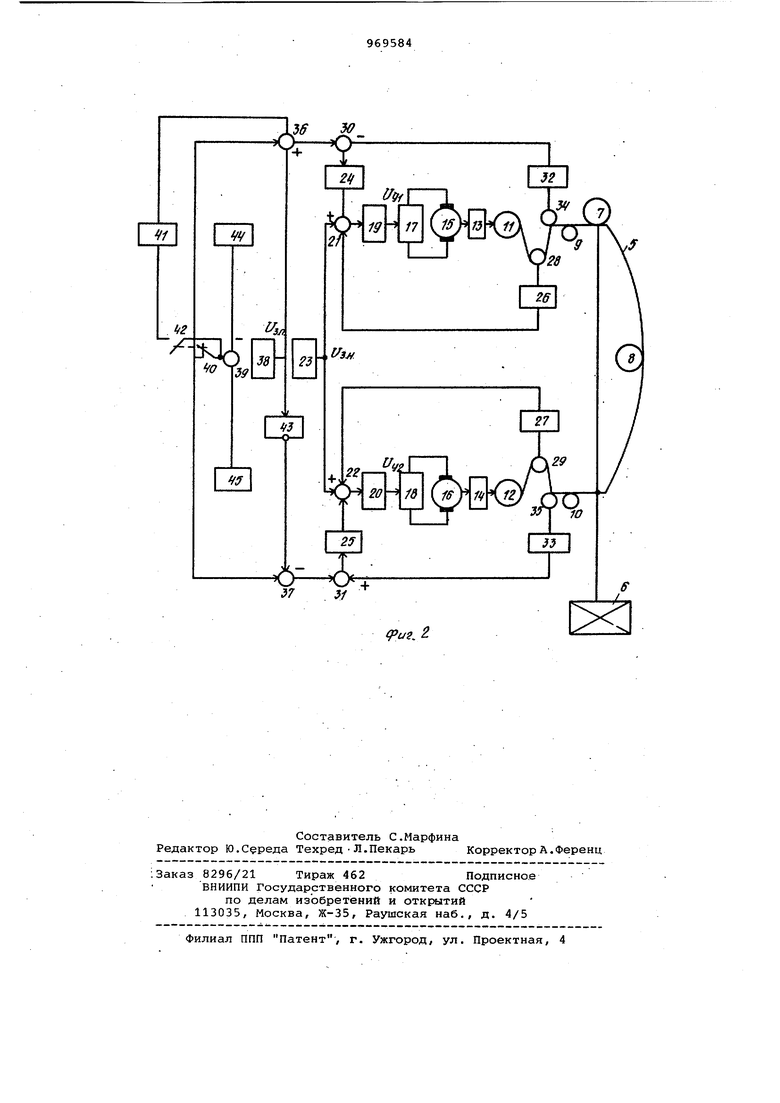
30 регуляторов скорости. Кроме того, электронный узел управления режимом работы электродвигателей дополнительно содержит задат чик сигналов перемещения, инвертор, первый и второй датчики скорости кач ки точек подвеса канатной дороги, . подключенный к их выходам сумматор датчиков скорости качки, нормально замкнутый контакт, первый и второй дополнительные сумматоры регуляторов скорости, выходы которых подключены соответственно ко входам первого и второго сумматоров регуляторов скорости , а первые входы через нормаль но замкнутый контакт соединены с выходом сумматора датчиков скорости качки, причем выход задатчикс1 сигналов перемещения подключен ко второму входу первого дополнительного сумматора регулятора скорости и вход инвертора, выход последнего соединен со вторым входом второго дополнительного сумматора регулятора Ско рости .. Кроме того, упомянутый узел вклю чает нормально открытый контакт и усилитель, вход которого через нор мально открытый контакт подключен к выходу сумматора датчиков скорости качки, а выходы связаны с третьим вх дом дополнительного сумматора первого регулятора скорости. На фиг. 1 изображена кинематичес кая схема предлагаемого устройства; на фиг. 2 - функциональная схема. Устройство для передачи груза меж ду передающим судном 1 и принимающим судном 2 содержит мачты 3 и 4,между которыми натянуты ветви каната 5. Груз находится в тележке б, соединенной с блоком 7, перемещающимся по. верхней ветви каната 5, и жестко связанной с нижней ветвью каната, петля которого огибает блок 8 на мачте 4 принимающего судна 2, а два конца, огибающие блоки 9 и 10 на мачте 3 передающего судна 1, соединены с тяговыми лебедками 11 и 12. Лебедки 11 и 12 через редукторы 13 и 14 соединены со своими электродвигателями 15 и 16 постоянного тока. Последние подключены к тиристорным преобразователям 17 и 18, которые своими входами соединены через регуляторы 19 и 20 натяжения с выхо1дами сумматоров 21 и 22 регуляторов натяжения, входы последних связаны с выходами задатчика 23 натяжения, регуляторов 24 и 25-скорости перемещения и датчиков 26 и 27 натяжения ветвей каната, которые через блоки 28 и 29 связаны с ветвями каната. Выходы сумматоров 30 и 31 ре гуляторов скорости соединены со входами регуляторов 24 и 25, а входы этих сумматоров соединены с выходами датчиков 32 и 33 скорости ветвей каната, входы которых связаны с ветвями каната-через блоки 34 и 35. Кроме того, входы сумматоров 30 и 31 соединены с выходами дополнительных сумматоров 36 и 37 регуляторов скорости. Сумматор 36 подключен своим входом к выходу задатчика 38 сигналов перемещения. Выход сумматора 39 датчиков скорости качки через нормально замкнутый контакт 40 подключен к усилителю 41, вход последнего через нормально открытый контакт 42 соединен с выходом сумматора 39. Вход инвертора 43 связан с выходом задатчика 38, авыход инвертора 43 - со одом сумматора 37. Датчики 44 и 45 скорости качки точек подвеса подключены к- ziyMMaTopy 39. Контакт 42 и контакт 40-сблокированы так, что при замыкании одного из них размыкается другой. Устройство работает следующим образом. В исходном состоянии сигналы управления на входе тиристорных преобразователей равны нулю и натяжение в канатной дороге также равно нулю. Задание натяжения производится подачей задающего сигнала на входы сумматоров 21 и 22 и далее на входы соответствующих регуляторов 19 и 20 натяжения. На выходе тиристорных преобразователей появляется положительное напряжение и электродвигатели 15 и 16 начинают вращаться в разные стороны, выбирая слабину канатов . По мере работы электродвигателей увеличивается натяжение в канатах и увеличиваются сигналы на выходах датчиков 26 и 27 натяжения, что приводит к уменьшению сигналов разбаланса на входах регуляторов 19 и 20 натяжения. В установившемся режиме электродвигатели неподвижны и развивают одинаковые тяговые усилия, равные заданному натяжению. Сигналы на входах регуляторов 19 и 20 натяжения близки к нулю,напряжение тиристорных преобразователей минимально. При отработке сигнала задания натяжения на входы сумматоров 21 и 22 поступают также сигналы датчиков 32 и 33 скорости через регуляторы 24 и 25, что несколько замедляет время установления заданного натяжения и уменьшает динамические усил.ия в канатной дороге. Для задания скорости перемещения грузовой тележки, задатчиком 38 перемещения, подается напряжение на вход дополнительного сумматора 36 и на вход инвертора 43. На выходе последнего сигнал меняет свой знак и подается на вход сумматора .37. Таким образом, на сумматоры -36 и 37 и далее через сумматорых i30 и 31 регуляторов 24 и 25 скорости на сумматоры 21 и 22 регуляторов натяжения подаются два сигнала одинаковой величины, но противоположной полярности, В результате этого суммарный сигнал на входе сумматора 21 увеличивается, а на входе сумматора 22 уменьшается. При этом увеличивается сигнал управления на входе преобразователя 17 и уменьшается сигнал управления на входе преобразователя 18. Это приводит к увеличению момента стоянки электродвигателя 15 и к уменьшению момента стоянки электродвигателя 16. Натяжение в ветви каната, связанной с электродвигателем 15, увеличивается, а натяжение в ветви каната, связанной с электродвигателем 16, уменьшается.
Как только усилие в ветви каната электродвигателя 15 станет больше усилия в ветви каната электродвигателя 16 и достаточно, чтобы прокрутить лебедку электродвигателя 16 в сторону травить, начинается перемещение тележки 6 в направлении принимающего судна 2. Электродвигатель 15 продолжает работать в двигательном режиме и его скорость увеличивается. Натяжение в ветви каната, связанной С электродвигателем 15, уменьшается. в то же время электродвигатель 16 под действием тягового усилия электродвигателя 15 начинает вращаться в обратную сторону и работать в генераторном режиме. Его скорость растет, что приведет к росту его тока и увеличению тормозного усилия в ветви каната/ свйзанной с ним. Усилие, вызывающее перемещение грузовой тележки, равно разности натяжений в ветвях каната, развиваемых электродвигателями 15 и 16. Чем больше эта разность, тем больше скорость перемещения грузовой тележки.
Изменение направления движения тележки 6 осуществляется изменением полярности сигнала задатчика перемещения. В этом случае электродвигатель 16 переходит работать в двига тельный режим, а электродвигатель 15 в генераторный режим и осуществляет рекуперацию энергии в сеть.
Для безударной передачи грузов в условиях качки при нахождении грузовой тележки в зоне принимающего судна необходимо, чтобы грузовая тележка осуществляла слежение за мачтой последнего. Для этого скорость перемещения грузовой тележки относительно мачты принимающего судна должна оставаться постоянной и независимой от качки судов. Предлагае мое устройство реализует это требование следующим образом.
.Допустим, грузовая тележка движется к принимающему судну. Пусть теперь передающее судно качнулось влево. Для обеспечения постоянной скорости грузовой тележки относительно принимающего судна, необходимо скорость выбирания верхней ветви каната уменьшить, а скорость вытравливания нижней ветви каната увеличить на величину скорости качки передающего судна, так как скорость вращения электродвигателей прямо пропорциональна скоростям перемещения ветвей кана тов.
При отработке качки передающего
0 судна на выходе датчика 44 скорости качки появится отрицательный сигнал, пропорциональный скорости качки.Этот сигнал через сумматор 39, контакт 40 подается на входы сумматоров и 37, что приводит к уменьшению сиг5нала на выходе регулятора 25 скорости. При неизменном сигнале задания натяжения на выходе- сумматора 21 сигнал уменьшается, а на выходе сумматора 22 увеличивается, что приводит
0 к уменьшению сигналов управления на входах тиристорных преобразователей. Вследствие этого увеличиваются углы открывания тиристоров силовых схем. Уменьшается напряжение преобразователя 17, работающего выпрямителем,и увеличивается напряжение преобразователя 18, работающего инвертором. Ток электродвигателя 15, определяемый разностью между напряжением пре0образователя 17 и ЭДС двигателя 15, , уменьшается, и ток электродвигателя 16, определяемый разностью между ЭДС двигателя 16 и напряжением инвертора 18, также уменьшается. Это при5водит к уменьшению натяжения ветвей каната, создаваемого электродвигателями. Но вследствие качки передающего судна натяжение ветвей каната возрастает. Одновременно с этим уве0личиваются сигналы обратных связей на выходе датчиков 26 и 27 натяжения, что приводит к дополнительному умень-: шению сигналов управления на входах преобразователей 17 и 1Ь, а следова5тельно и к дополнительному уменьшению натяжения в ветвях каната,создаваемого электродвигателями. В установившемся режиме натяжение катана остается неизменным и равным сумме натяжений, создаваемых электродвига0телями и качкой. Скорость электродвигателя 15 уменьшается, а скорость электродвигателя 16 возрастает на одну и ту же величину. Следовательно скорость перемещения ветвей каната
5 относительно блока 8 на мачте принимающего судна остается неизменной. Отсюда и скорость грузовой тележки относительно принимающего судна постоянна.
0
Пусть теперь принимающее судно качнулось.влево. Для обеспечения постоянной скорости грузовой тележки относительно принимающего судна,необходимо скорость выбирания верхней i
5 ветви каната увеличить, а скорость
вытравливания нижней ветви каната уменьшить на величину, скорости качки принимающего судна. При отработке качки принимающего судна на выходе датчика 45 скорости качки появляется положительный сигнал, пропорциональный скорости качки. Этот сигнал через сумматор 39, контакт 40 подается на входы сумматоров 36 и 37, что вызывает увеличение сигнала .на выходе регулятора 24 скорости и уменьшение сигнала на выходе регулятора 25 скорости. При неизменном сигнале задания натяжения на выходе сумматора 21 сигнал увеличивается, а на выходе сумматора 22 уменьшается. Это приводит к увеличению сигналов управления на входах тиристорных преобразователей. Вследствие этого уменьшаются углы открывания тиристоров силовых схем. Увеличивается напряжение преобразователя 17, работающего выпрямителем и уменьшается напряжение преобразователя 18,работающего интертором. Ток электродвигателя 15, определяемый разностью между напряжением преобразователя 17 и электродвижущейся силой (ЭДC двигателя, увеличивается, и ток электродвигателя 16, определяемый раэ11остыо между ЭДС двигателя 16 и напряжением преобразователя 18, так же увеличивается. Это приводит к увеличеншо натяжения ветвей каната, создаваемого электродвигателями. Но вследствие качки принимающего судна натяжение ветвей канагга уменьшается. Одновременно с этим уменьшается сигнал обратных связей на выходе датчиков 26 и 27 натяжения, что приводит к дополнительному увеличению сигналов управления на входах преобразователей 17 и 18,а следовательно, и к дополнительному увеличению натяжения ветвей канатаj создаваемого электродвигателями. В установившемся режиме натяжения каната остается практически неизменным и равным сумме на тяжений, создаваемых электродвигателем и качкой.Скорость электродвигателя 15 возрастает а скорость электродвигателя 16 уменьшается на одну и ту же величину.Следовательно, скорость перемещения ветвей каната относительно блока 8 на о принимающем судне остается постоянной, а скорость грузовой тележки относительно принимающего судна неизменной. j
Для безударной передачи грузов в условиях качки при нахождении грузо вой тележки в зоне передающего судна необходимо, чтобы грузовая тележка осуществляла слежение за мачтой пос:леднего. Для этого скорость перемещения грузовой тележки относительно мачты передающего судна должна оставаться постоянной и независимой OTI качки судов.
Предлагаемое устройство выполняет это требование следующим образом.
Допустим, грузовая тележка движется к передающему судну. Пусть теперь передающее судно качнулось влево. Для обеспечения постоянной скорости грузовой тележки относительно мачты судна 1, необходимо скорость выбирания нижней ветви каната оставить постоянной, а скорость вытравливания верхней ветви каната увеличить .на величину равную удвоенной скорости качки передающего .
I
Для этого замыкается контакт 42 и
размыкается контакт 40. При этом выход сумматора 39 подключается ко входу усилителя 41. При отработке качки передающего судна на выходе датчика 44 скорости качки появляется отрицательный сигнал пропорциональный скорости качки. Этот сигнал через сумматор 39, контакт 42 поступает на
усилитель 41. .С выхода последнего ., усиленный сигнал, пропорциональный удвоенной скорости качки передающего судна, подается на вход сумматора 36, что приводит к увеличению сигнала «а выходе регулятора 24 скорости. При неизменном сигнале задания натяжения на выходе сумматора 21 сигнал увеличивается, а сигнал на сумматора 22 не изменяется. Увеличение сигнала на выходе сумматора 21 приводит к уменьшению сигнала управления на входе преобразователя 17. Вследствие этого увеличиваются углы . открывания тиристоров силовой схемы,
что увеличивает напряжение тиристорного преобразователя 17, работающего инвертором. Напряжение тиристорного преобразователя 18, работающего выпрямителем, не изменяется. Ток электродвигателя 15, определяемый разностью между ЭДС этого двигателя к, напряжением инвертора уменьшается, а ток электродвигателя 16 остается неизменным. Натяжение ветвей каната,
создаваемое электродвигателями, уменьшается. Но вследствие качки передающего судна натяжение ветвей каната возрастает. Одновременно С этим увеличивается сигнал обратной связи на выходе датчика 26 натяжения,что приводит .
i дополнительному уменьшению сигнала . управления на входе тиристорного преобразователя 18, а следовательно и к.дополнительному уменьшению натяжения ветвей каната, создаваемого элек;тродвигателями. В установившемся режиме натяжение каната остается практичес1 и неизменным и равным сумме натяжений, создаваемых электродвигателя- . ми и качкой. Скорость электродвигате-
ля 15 увеличивается, а скорость электродвигателя 16 остается неизменной Следовательно и скорость грузовой т лежки относительно мачты передающег судна не изменяется. Пусть теперь принимающее судно к нулось влево. Для обеспечения посто янной скорости грузовой тележки отн сительно мачты судна 1, необходимо СКОРОСТЬ выбирания нижней ветви ка ната оставить постоянной, а скорост вытравливания верхней ветви каната уменьшить на величину равную Удвоенной скорости качки принимающе судна. При отработке качки принима щего судна на выходе датчика 45 ско рости качки появляется положительный сигнал, пропорциональный скорос ти качки принимающего судна. Этот сигнал через сумматор 39, контакт 4 подается на вход усилителя 41. С вы хода последнего усиленный сигнал, пропорциональный удвоенной скорости качки принимающего судна, подается на вход сумматора 36, что приводит к уменьшению сигнала на выходе регулятора 24 скорости. При неизменном сигнале задания натяжения на выходе сумматора 21 си нал уменьшается, а сигнал на выходе сумматора 22 не изменяется. Уменьшение сигнала на выходе сумматора 21 приводит к увеличению сигнала уп равления на входе тиристорного преобразователя 17. Вследствие этого уменьшаются углы открывания тиристоров силовой схемы, уменьшается на пряжение .тиристорного преобразователя 17, работающего инвертором.Напряжение тиристорного преобразовате ля 18, работающего выпрямителем,не изменяется. Ток электродвигателя 15, определяемый разностью между ЭДС этого двигателя и напряжением и вертора, увеличивается, а ток элект родвигателя 16 остается неизменным. Натяжение ветвей кантата, создавае мое электродвигателями, увеличивается . Но вследствие качки принимающего судна натяжение ветвей каната уменьшается. Одновременно с этим уменьшается сигнал обратной связи на выходе датчика 26 натяжения,что приводит к дополнительному увеличению сигнала управления на входе тиристорного преобразователя 17, а следовательно, и к дополнительному увеличению натяжения ветвей каната, создаваемого.электродвигателями. В установившемся режиме натяжения каната остается практически неизменньм Д1 равным сумме натяжений, создаваемого электродвигателями и качкой.СкоtiocTb электродвигателя 15 уменьшается, а скорость электродвигателя,1 нр изменяется. Отсюда и скорость .грузовой тележки относительно мачты передающего судна постоянна. Обеспечение постоянной скорости грузовой тележки относительно передающего судна при совместной качке судов и изменении направления перемещения грузовой тележки повышает надежность работы предлагаемого устройства. Формула изобретения 1. Устройство для передачи грузов между судами в море в условиях качки, содержащее ветви каната, заведенные на дне тяговые лебедки связанные с электродвигателями постоянного тока, грузовую тележку, прикрепленную к одной из ветвей каната и кинематически связанную с другой ветвью, а также электронный узел управления режимом работы электродвигателей, включающий первый и второй датчики натяжения ветвей каната, входы которых связаны с ветвями каната, первый и второй тиристорные преобразователи, подключенные к якорям первого и второго электродвигателей соответственно, первый и второй регуляторы натяжения ветвей каната, выходы которых подключены ко входам первого и второго тиристорных преобразователей соответственно, первый и второй сумматоры регуляторов натяжения, выходы которых подключены ко входам первого и второго регуляторов натяжения соответственно, причем выходы датчи- . ков натяжения и выход задатчика сигналов натяжения подключены ко входам первого и второго сумматоров регуляторов натяжения соответственно, отличающееся тем, что, с целью повышения надежности работы устройства путем получения стабильных скоростей перемещения грузовой тележки при подходе к приемному устройству передающего или принимающего судна, электронный узел управления режимом работы электродвигателей снабжен контуром регулирования скорости перемещения грузовой тележАи, включгиощим первый и второй датчики скорости ветвей каната, кинематически связанные -с ветвями каната,первый и второй регуляторы скорости ветвей каната, выходы которых подключены ко входам суммат эров первого и второГО регуляторов натяжения ветвей каната соответственно, первый и второй сумматоры регуляторов скорости,причем входы регуляторов скорости связаны соответственно с выходами сумматоров регуляторов скорости. . 2. Устройство ПОП.1, отличающееся тем, что электронный узел управления режимом работы электродвигателей дополнительно содержит задатчик сигналов перемещения.
инвертор, первый и второй датчики скорости качки точек подвеса канатной дороги, подключенный к их выходам сумматор датчиков скорости качки, .нормсшьно замкнутый контакт, первый и второй дополнительные сумматоры регуляторов скорости, выходы которых подключены соответственно ко входам первого и втброго сумматоров регуляторов скорости, а.первые входы; через нормально замкнутый контакт , соединены с выходом сумматора датчиков скорости качки, причем выход задатчика сигналов перемещения подключен ко второму входу первого дополнительного сумматора регулятора скорости и входу инвертора, выход последнего соединен со вторым входом ,
второго дополнительного сумматора регулятора скорости.
3. Устройство по пп. 1 и 2, о т лича.ющееся тем, что элект ронный узел управления режимом работы электродвигателей включает нормально открытый контакт и усилитель, вход которого через нормально открытый контакт подключен к выходу сумматора датчиков скорости качки, а выход связан с третьим входом дополнительного сумматора первого регулятора скорости.
источники информации,, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2909451/27-11,
,кл. В 63 В 27/30, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1986 |
|
SU1357307A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |