дополнительные сумматоры регуляторов скорости, выходы которых подключены соответственно к входам первого и второго сумматоров регуляторов скорости, а первые входы черезнормально замкнутый контакт соединены с выходом сумматора датчиков скорости качки, причем выход задатчика сигналов перемещения грузовой тележки подключен к BTopoN-iy входу первого дополнительного сумматора регулятора скорости, а выход инвертора соединен с вторым входом второго дополнительного сумматора регулятора скорости,
3, Система по пп. 1и2, отличающаяся тем, что электронный узел управления режимом работы электродвигателей включает нормально открьт тый контакт и усилитель j вход которого через этот контакт подключен к выходу сумматора датчиков скорости качки, а выход связан с третьим входом дополнительного сумматора первого регулятора скорости

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1986 |
|
SU1357307A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |

1, СИСТЕМА ПЕРЕДАЧИ ГРУЗОВ МЕЖДУ СУДАМИ В МОРЕ В УСЛОВИЯХ КАЧКИ, содержащая ветви каната, заведенные на две тягоиле лебедки, свягзанные с соединенными между собой первым и вторым электродвигателями постояш ого тока, имеющими обмотки возбуждения, грузовую тележку, прикрепленную . к одной из ветвей каната и кинематически связанную с другой ветвью каната, а .. также электронный узел управлй1ия режи , мом работы электродвигателей, включающий задатчики сигналов натяжения ветвей каната и сигналов перемещения грузовой тележки, к последнему из которых подключен инвертор, и три электрические цепи, первая из которых связана с якорями обоих электродвигателей и включает последовательно соединенные задатчик тока, сумматор, регулятор тока и тиристорный преобразователь, первый выход которого соединен с датчиком тока, связанным с первым электродвигателек, а второй выход - с вторым, энектродвнгате- лем, причем выход датчика тока подключен к входу упомянутого сумматора, а две другие электрические цепи связаны с соответствующими лебедками и содержат каждая последовательно соединенные сумматор регулятора натяжения, регулятор натяжения и тиристорный преобразователь, подключенный к обмочже воэЙулс дения, и датчик натяження, выкод которого подключен к входу соответствующего сумматора регулятора натяжения, при этом выход задатчика сигналов натянсе- НИН ветвей каната подключен к обоим сумматорам регулятора натяжения, о- т личающаяся тем, что с целью повышения надежности работы системы путем получения стабильных скоростей пе ремешения грузовЫ тележки прт подходе к прйемноь/qr устройству передающего или принимающего судна, электронный узел управления режимом работы электродви(Л гателей снабжен контуром регулирования скорости перемещения грузовой тележки, включающим первый и второй датчики скорости ветвей каната, первый и второй ре- . гуляторы скорости ветвей каната выхоШ которых подключены к входам соответствующих сумматоров регуляторов натяже-НИН, первый и второй сумматоры регулято00 САЭ ров скорости, причем входы регуляторов скорости ветвей каната связаны.- с выхо 4 to дами соответствующих сумматоров регуляторов скорости, к которым подключены соответствующие датчики скорости ветвей каната. 2. Система по п, 1, о т л и ч а ю щ а я с я тем, что электронный узеп управления режимом работы электродвигателей включает первый и второй датчики скорости качки точек подвеса канатной дороги подключенный к их выходам сумматор датчиков скорости качки, нормально замкнутый контакт, первый и второй
1
Изобретение относится к судострЬению в частности, к системам передачи грузов между судами в море в условиях качки.
Известна система передачи грузов между судами в море в условиях качки, содержащая ветви каната, заведенные на две тяговые лебедки, связанные с соединенными между, собой первым и вторым электродвигателями постоянного тока, имеквдими обмотки возбуждения, грузовую тележку, прикрепленную к одной из ветвей каната и кинематически связанную с другой ветвыб каната, а также электронный узол управления режимом работы электродвигателей, включающий зЙ1атчики сигналов натяжения ветвей каната и сигналов перемещения грузовой тележки, к последнему из которых подключен инвертор, и три электрические цепи, первая из которых связана с якорями обо-их электродвигателей и включает последовательно соединенные задатчик тока, сумматор, регулят й) тока и тиристорный преобразователь, первый выход которого соединен с датчиком тока, связанным с первым электродвигателем, а второй выход - с вторым электродвигателем, причем выход датчика тока подключен к входу упомянутого сумматорад а две другие электрические цепи связаны с соответствующими, лебедками и содержат каждая последовательно соединенные сумматор регулятора натяжения, выход которого подключен к входу соответствующего сумматора регулятора натяжения, при этом выход задатчика сигналов натяжения ветвей каната подключен к обоим сумматорам регулятора натяжения 1.
Недостатком известной системы является недостаточная стабильность перемещения грузовой тележки при подходе к приемному устройству передающего или принимающего судна.
Цель изобретения - повышение надеж-
Кости работы системы путем получения стабильных скоростей перемещения гру-зовой тележки при подходе к приемному устройству передающего или принимающего судна.
Для достижения этой цепи, электронный узел управления режимом работы электродвигателей снабжен контуром регулирования скорости перемещения грузовой тележки, включающим первый и второй датчики скорости ветвей каната, первый и второй регуляторы скорости ветвей каната, выходы которых подключены к входам соответствующих сумматоров регуляторов натяжения, первый и второй
сумматоры регуляторов скорости, причем входом регуляторов скорости ветвей каната связаны с выходами соответствующих сумматоров регуляторов скорости, к которым подключены соответствующие датчики скорости ветвей каната.
Кроме того, электронный узел управления режимов работы электродвигателей включает первый и второй датчики скорости качки точек подвеса канатной дороги, подключенный к их выходам сумматор датчиков скорости качки, нормально замкнутый контакт первый и второй дополнительные сумматоры регуляторов ско-г
рости, выходы которых подключены соответственно к входам первого и второго сумматоров регуляторов скорости, а первые входы через нормально замкнутый контакт соединены с выходом сумматора
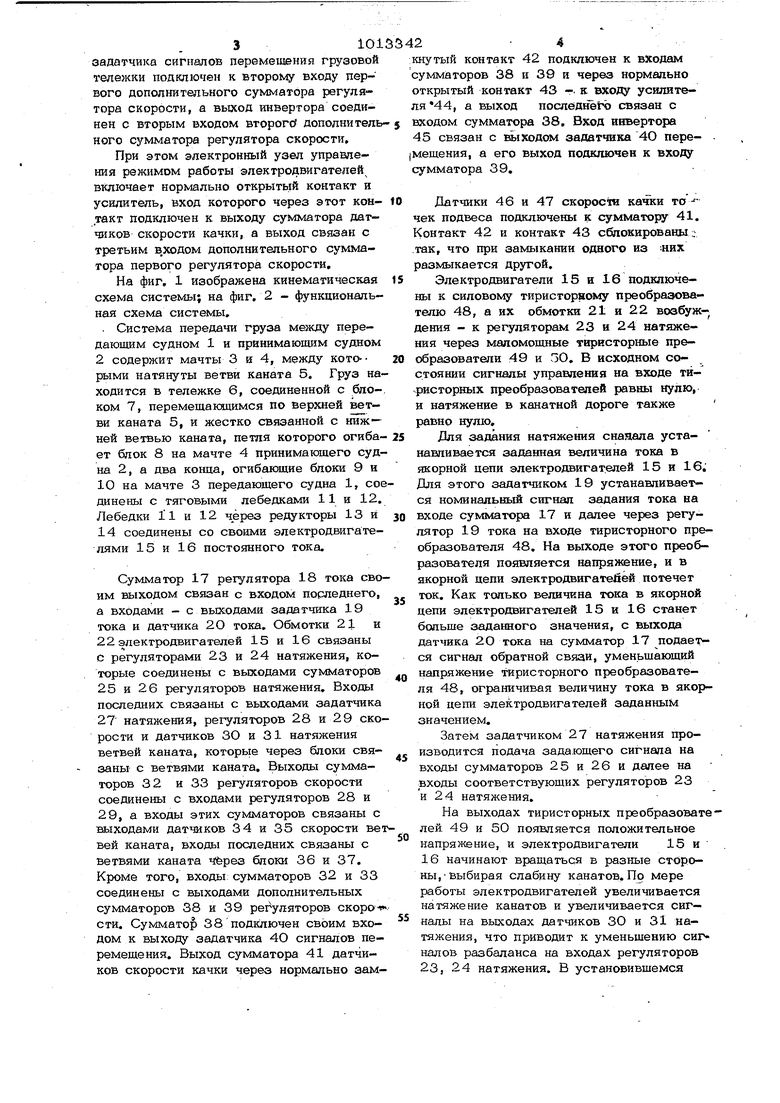
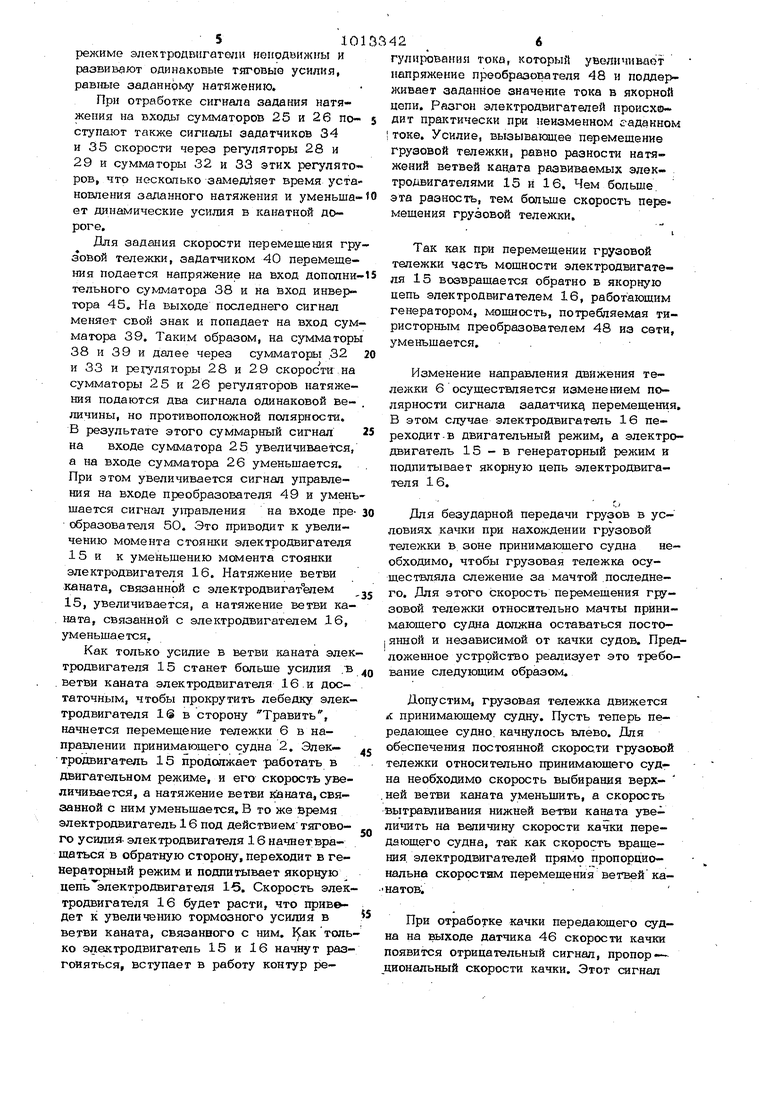
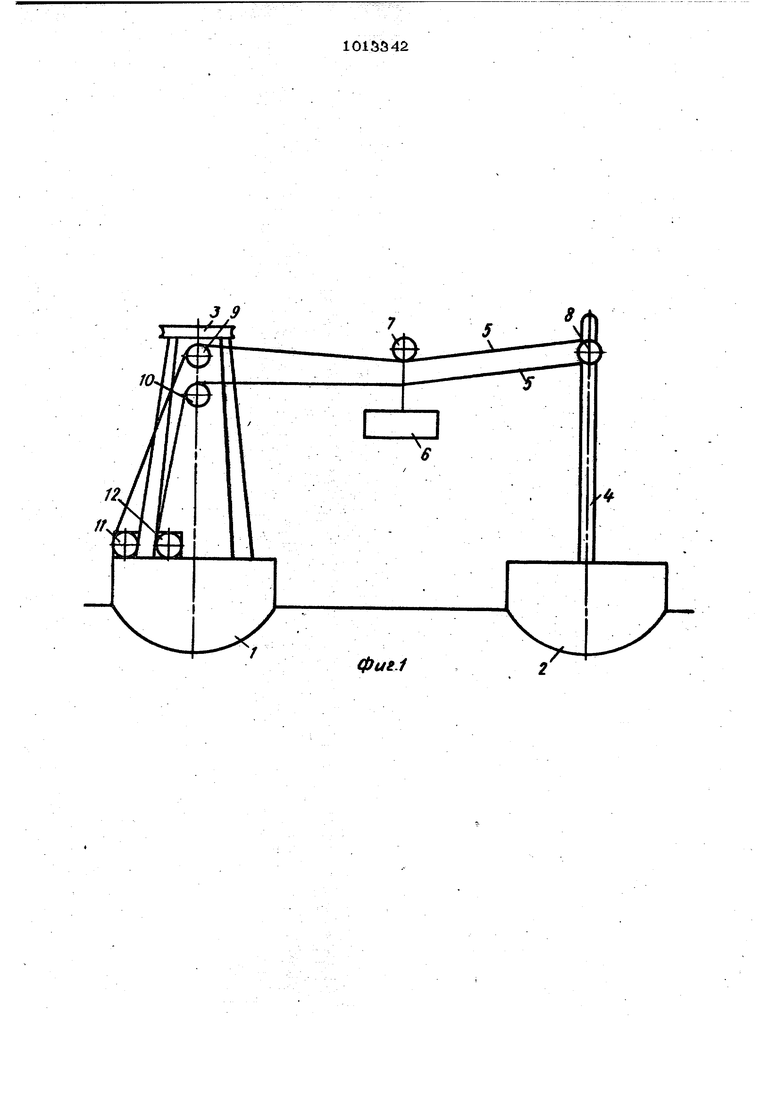
датчиков скорости качки, причем выход задатчика сигналов перемеишния грузовой тележки подключен к второму входу первого дополнительного сумматора регулятора скорости, а выход инвертора соединен с вторым входом второго дополнитель ного сумматора регулятора скорости. При этом электронный узел управления режимом работы электродвигателей включает нормально открытый контакт и усилитель, вход которого через этот контакт подключен к выходу сумматора датчиков скорости качки, а выход связан с третьим в.ходом дополнительного сумматора первого регулятора скорости. На фиг, 1 изображена кинематическая схема системы; на фиг, 2 - функциональная схема системы, . Система передачи груза между передающим судном 1 и принимающим судном 2 содержит мачты 3 и 4, между кото- рыми натянуты ветви каната 5. Груз на ходится в тележке 6, соединенной с блоком 7, перемещакадимся по верхней ветви каната 5, и жестко связанной с нижней ветвью каната, петля которого огиба ет блок 8 на мачте 4 принимающего судна 2, а два кокща, огибающие блоки 9 и Ю на мачте 3 передающего судна 1, со динены с тяговыми лебедками 11 и 12, Лебедки 11 и 12 через редукторы 13 и 14 соединены со свошхли электродвигателями 15 и 16 постоянного тока. Сумматор 17 регулятора 18 тока сво им выходом связан с входом последнего, а входами - с выходами задатчика 19 тока и датчика 2 О тока. Обмотки 21 и 22 электродвигателей 15 и 16 связаны с регуляторами 23 w 24 натяжения, которые соединены с выходами сумматоров 25 и 26 регуляторов натяжения. Входы последних связаны с выходами задатчика 27 натяжения, регуляторов 28 и 29 ско рости и датчиков 30 и 31 натяжения ветвей каната, которьге через блоки связаны с ветвями каната. Выходы сумматоров 32 и 33 регуляторов скорости соединены с входами регуляторов 28 и 29, а входы этих сумматоров связаны с выходами датчиков 34 и 35 скорости вет вей каната, входы последних связаны с ветвями каната Через блоки 36 и 37, Кроме того, входы сумматоров 32 и 33 соединены с выходами дополнительных сумматоров 38 и 39 регуляторов скород сти. Сумматор 38 подключен своим входом к выходу задатчика 4О сигналов перемещения. Выход сумматора 41 датчиков скорости качки через нормально замк1Еутый контакт 42 подключен к входам сумматоров 38 и 39 и через нормально открытый контакт 43 -, к входу усилителя 44, а выход последнего связан с входом сумматора 38, Вход И1гоертора 45 связан с m ходом задвтчвка 4О переМещения, а его выход подключен к входу сумматора 39, Датчики 46 и 47 скорости качки подвеса подключены к сумматору 41, Контакт 42 и контакт 43 сблокированы;; .так, что при замыкании одного из «их размыкается другой. Электродвигатели 15 и 16 подключены к силовому тиристораому преобразователю 48, а их обмотки 21 и 22 возбуждения - к регуляторам 23 и 24 натяжения через маломощные тирнсторные преобразователи 49 и 30, В исходном состоянии сигналы управления на входе тйристорных преобразователей равны нулю, и натяжение в канатной дороге также равно нулю. Для задания натяжения снаяала устанавливается заданная величина тока в якорной цепи электродвигателей 15 и 16, Для этого задатчиком 19 устанавливается номинальный сигнал задания тока на входе сумматора 17 и далее через регулятор 19 тока на входе тиристорного преобразователя 48, На выходе этого преобразователя поягвляется напряжение, и в якорной цепи электродвигатейей потечет ток. Как только величина тока в якорной цепи электродвигателей 15 и 16 станет больше заданного значения, с выхода датчика 2Q тока на сумматор 17 подается сигнал обратной связи, уменьшающий напряжение тиристорного преобразователя 48, ограничивая величину тока в якорной цепи электродвигателей заданным значением. Затем задатчиком 27 натяжения производится подача задающего сигнала на входы сумматоров 25 и 26 и далее на входы соответствующих регуляторов 23 и 24 натяжения. На выходах тиристорных преобразователей 49 и 50 появляется положительное напрянщние, и электродвигатели 15 и 16 начинают вращаться в разные стороны,-выбирая слабину канатов. По мере работы электродвигателей увеличивается натяжение канатов и увеличивается сигналы на выходах датчиков 30 и 31 натяжения, что приводит к уменьшению сигналов разбаланса на входах регуляторов 23, 24 натяжения. В установившемся электродвигатели иенрдвяжны и развивают одинаковые тяговьш усилия, равные заданному натяжению. При отработке сигнала задания натяжения на входы сумматоров 25 и 26 поступают также сигналы эадатчиков 34 и 35 скорости черва регуляторы 28 и 29 и сумматоры 32 и 33 этих регуляторов, что несколько аамедЛяет время уста новления заданного натяжения и уменьшает динамические усилия в канатной дороге. Для задания скорости перемещения гру зовой тележки, задатчиком 40 перемещения подается напряжение на вход допопни тельного сумматора 38 и на вход инвертора 45. На выходе последнего сигнал меняет свой знак и попадает на вход сум матора 39. Таким образом, на сумматоры 38 и 39 и далее через сумматоры 32 и 33 и регуляторы 28 и 29 скорости на сумматоры 25 и 26 регуляторов натяжения подаются два сигнала одинаковой величины, но противоположной полярности, В результате этого суммарный сигнал на входе сумматора 25 увеличивается, а на входе сумматора 26 уменьшается. При этом увеличивается сигнал управления на входе преобразователя 49 и умень шается сигнал управления на входе преобразователя 50. Это приводит к увеличению момента стоянки электродвигателя 15 и к уменьшению момента стоянки электродвигателя 16. Натяжение ветви каната, связанной с электродвигателем 15, увеличивается, а натяжение ветви каната, связанной с электродвигателем 16, уменьшается. Как только усилие в ветви каната элек тродвигателя 15 станет больше усилия ;в .ветви каната электродвигателя 16.и достаточным, чтобы прокрутить лебедку электродвигателя IS в сторону Травить, начнется перемещение тележки 6 в направлении принимающего судна 2. Элек- тродвигатеяь 15 продолжает работать в двигательном режиме, и его скорость увеличивается, а натяжение ветви каната, связанной с ним уменьшается, В то же Время электродвигатель 16 под действием тягового усилия- электродвигателя 16 начнетврашаться в обратную сторону, переходит в генераторный режим и подпитывает якopнyю цепьэлектродвигателя 1в, Скорость электродвигателя 16 будет расти, что приведет к увеличению тормозного усилия в ветви каната, связанвого с ним. 1 актоль ко электродвигатель 15 и 16 начнут разгоняться, вступает в работу контур регулиртваиня тока, который увеличивает напряжение преобразователя 48 и поддерживает заданное значение тока в якорной цепи. Разгон электродвигателей происхе) дит практически при неизменном гаданном токе. Усилие, вызывающее перемещение грузовой тележки, равно разности натяжений ветвей кан.ата развиваемых электродвигателями 15 и 16, Чем больше, эта разность, тем больше скорость перемещения грузовой тележки, Так как при перемещении грузовой тележки честь мощности электродвигателя 15 возвращается обратно в якорную цепь электродвигателем 16, работающим генератором, мощность, потребляемая тиристорным преобразователем 48 из сети, уменьшается.. Изменение направления движения тележки 6 осуществляется изменением полярности сигнала задатчик перемещения. В этом случае электродвигатель 16 переходит- в двигательный режим, а электродвигатель 15 - в генераторный режим и подпитывает якорную цепь электродвигателя 16. -.:f Для безударной передачи грузов в условиях качки при нахождении грузовой тележки в зоне принимающего судна необходимо, чтобы грузовая тележка осуществляла слежение за мачтой .последнего. Для этого скорость перемещения грузовой тележки относительно мачты принимающего судна должна оставаться постоI янной и независимой от качки судов. Предложенное устройство реализует это требование следующим образом. Допустим, грузовая тележка движется л принимающему судну. Пусть теперь передающее судно.качнулось влево. Для обеспечения постоянной скорое.ти грузовой тележки относительно принимающего судна необходимо скорость выбирания верхней ветви каната уменьшить, а скорость вытравливания нижней ве-тви каната увели шть на величину скорости качки передающего судна, так как скорость вращения, электродвигателей прямо пропорциональна скоростям перемещения ветвейканатов. При отработке качки передающего судна на выходе датчика 46 скорости качки появится отрицательный сигнал, пропор- циональный скорости качки. Этот сигнал через сумматор 41 и контакт 42 подается на исоды сумматоров 38 и 39, что вызовет уменьшение сигнала на выходе регулятора 28 скорости и увеличение сигнала на выходе регулятора 29 скороети. При неизменном сигнале задания натяжения на выходе сумматоров 25 и 26 сиг налы уменьшаются. Это приводит к умень шению сигналов управления на входах ти. рвсторных преобразователей, В результате увеличиваются углы открьшания тиристоров и уменьшаются напряжения преобразователей 49 и 50, что в свою очередь уменьшает магнитные потоки и соответственно тяговые моменты электродвигателей. Ток в якорной цепи двигателей контуром регулирования тока поддерж;ивается равным заданному значению. Уменвшение тяговых моментов лектродвигателей приводит к уменьшению натяжения ветвей каната, создаваемого последними. Но вследствие качки передакщего судна натяжение везгвей каната возрастает. Одновременно с этим увеличатся сигналы обратных связей на входе датчиков 30 и 31 натяжения, что приведет к дополнительному уменьшению сигналов управления на входах преобразователей 49 и 50, а следовательно, и к дополнительно уменьшению натяжения ветвей каната, соз даваемого электродвигателями, В установившемся режиме натяжение каната остается неизменным и равным сумме натяжений, создаваемых электродвигателями в качкой. Скорость электродвигателя 15 уменьшилась, а скорость электродвигателя 16 возросла на одну и ту же вепичвву Следовательно скорость перемещения тает вей каната относительно блока 8 на мачте приннмакацетч оу{Ша осталась вевзмен ной. Отсюда и скорость грузовой тележки относительно принимаклцего судна постоянна. . Пусть теперь принимающее судной кач чулось влево. Для обеспечения постоянной скорости тележки относительно приннма- ющего судна, необходимо скорость выбирання верхней ветви каната увеличить, а I скорость вытравливания нижней ветви ка. ната уменьшить на величину скорости качки принимающего судна. При отработке качки принимающего судна на выходе датчика 47 скорости качки появится положительный сигнал, пропорционаяьный скорости качки. Этот сигнал через сумматор 41 и контакт 42 подается на входы сумматоров 38 и 39, что вызовет увеличение сигнала на выходе регулятора 28 и уменьшение сигнала на выходе регулятора 29 скорости. При неизменном сигнале задания натяжения, на выходе сумматоров 25(И 26 сигналы увеличатся. Это приводит к увеличению сигналов управления на входах тирис торных преобразователей. В результате уменьшаются углы открывания тиристоров н увеличи- ваются напряжения преобразователей 49 и 5О, что в своёЬ очередь увеличивает магнитные потоки и соответственно тя1ч вые моменты электродвигателей. Ток в якорюй цепи двигателей контуром регулирования тока поддерживается равным заданному значению;. Увеличение тяговых моментов электродвигателей приводят к увеличению натяжения ветвей каната, создаваемого последними. Но вследствие качки принимающего судна натяжение ветвей каната уменьшится. Одновременно с этим уменьшатся сигналы обратных связей на выходе датчиков 30 и 31 натяжения, что приведет к дополнительному увеличению сигналов управления На входах преобразователей 49 и 5О, а следовательно, и к дополнительному увеличению натяжения ветвей каната, создаваемогб электродвигателями, В устано 1вшемся режиме натяжение каната остается практически неизменным, равным сумме натяжений, создава уолх электродвигателями и качкой. Скорость электродвигатепя 15 возросла, а скорость электродвигатепя 16 уменьшилась на одну и ту же величину. Следовательно, скорость перемещения ветвей каната относительно блока 8 на принимающем судне осталась неизменной, и скорость грузовой тележки относительно этого судна также постоянна, безударной передачи грузов в условиях качки при нахождении грузовой тележки в зоне передающего судна, необходимо, чтобы грузовая тележка осущес вляла слежение за мачтой последнего. Для этого скорость перемещения грузовой тележки относительно мачты передающего судна йолжна оставаться постоянной и независимой от качки судов. Предложенное устройство выполняет это требование следующим образом./ Допустим, грузовая тележка движется к передающему судну. Пусть теперь передающее усудно качнулось влево. Для обеспечения постоянной скорости грузовой тележки относительно мачты судна 1 необходимо скорость выбирания нижней ветви каната оставить постоянной, а скорость 9101 вытравливания верхней ветви каната увеличит на велишну удвоенной скорости ка ки пфедающего судна. Для этого замыкается контакт 43, и размыкается контакт 42. При этом вы ход сумматора 41 подключается к входу усилителя 44. При отработке качки передающего судна на выходе датчика 46 ско рости качки появится отрицательный сигнал, пропорциональный скорости качки. Этот сигнал через сумматор 41 и контакт 43 поступает на усилитель 44, С выхода последнего усиленный сигнал, пропорциональный удвоенной скорости качки передающего судна, подается на вход сумматора 38, что приводит к увеличению сигнала на выходе регулятора 2 28 скорости. При неизменном сигнале за дания натяжения на выходе сумматора 25 сигнал уменьшается, а сигнал на выходе сумматора 26 не изменится. Уменьшение сигнала на выходе сумматора 25 приведет к уменьшению сигнала управления на входе преобразователя 49, В результате увеличиваются углы открывания тиристоров этого преобразователя, что вы зовет уменьшение напряжения на его выходе, а следовательно, и уменьшение маг нитного потока двигателя 15, Напряжение тиристорного преобразователя 50 не изменится. Ток к якорной цепи обоих электродвигателей контуром регулирова ния тока поддерлшвается постоянным. Вследствие уменьшения потока электродвигателя 15 тяговый момент его умень шается, и натяжение ветвей каната, создаваемое электродвигателями, уменьшается. Но вследствие качки передающего судна натяжение ветвей каната возрастает. Одновременно с этим увеличивается сигнал обратной связи на выходе датчика 30 натяжения, что приведет к дополнительному уменьшению сигнала управления на входе тиристорного преобразователя 49, а следовательно, и к дополнительному уменьшеьшю натяжения ветвей каната, создаваемого электродвигателями, В установившемся режиме натяжение каната остается практически неизменным и равным сумме натяжений, создаваемых электродвигателями и качкой. Скорость электродвигателя 15 увеличилась, са ско рость электродвигателя 16 осталась неизменной. Следовательно и скорость грузовой тележки относительно мачты передающего судна не изменилац, Пусть теперь принимающее судно кач нулось влево. Для обеспечения постоянной скорости грузовой тележки относительно 210 мачты судна. 1, необходимо скорость выбирания нижней ветви 1саната оставить постоянной, а скорость вытравливания верхней ветви каната уменьшить на величину, равную удвоенной скорости качки принимающего судна. При отработке качки принимающего судна на выходе датЧИ1Ш 47 скорости качки появится положительный сигнал, пропорциональный скорости качки. Этот сигнал через сумматор 41 и контакт 43 подается на вход усилителя 44. С выхода последнего усиленный сигнал, пропорциональный удвоенной скорости качки при- нимающего судна, подается на вход сумматора 38, что приводит к уменьшению сигнала на выходе регулятора 28 скорости. При неизменном сигнале задания натяжения на входе сумматора 25 сигнал увеличатся, а сигнал на выходе сумматора 26 не изменится. Увеличение сигнала на выходе сумматора 25 приведет к увеличе1жю сигнала управления на входе преобразователя 49, В результате уменьшатся углы открывания тиристоров этого Преобразователя, что вызовет увеличение напряжения на его выходе, а следовательно, и увеличение магнитного потока двигателя 15. Напряжение тиристорного преобразователя 5О не изменился. Ток в якорной цепи обоих электродвигателей контуром регулирования тока поддерживается постоянным. Вследствие увеличения потока электродвигателя 15 тяговый момент его увеличивается, и натяжение ветвей 1ината, создаваемое электродвигателями, увеличивается. Но вследствие качки -принимающего судна натяжение ветвей каната уменьшится. Одновременно с этим уменьшится сигнал обратной связи на выходе датчика ЗО натяжения, что приведет к дополнительному увеличению сигнала управления на входе тиристорного преобразователя 49, а следовательно, и к дополнительному увеличению натяжения ветвей каната, создаваемого электродвигателями, В установившемся режиме натяжение каната остается практически неиаменным и равным сумме натяжений, создаваемых электродвигателями и качкой. Скорость электродвигателя 15 уменьшилась, а скорость электродвигателя 16 осталасьр неизменной. Следовательно, и скорость грузовой тележки относительно мачты передающего судна не изменилась. Система обладает высокой надежностью работы за счет стабильности скорости перемещения грузовой тележки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
