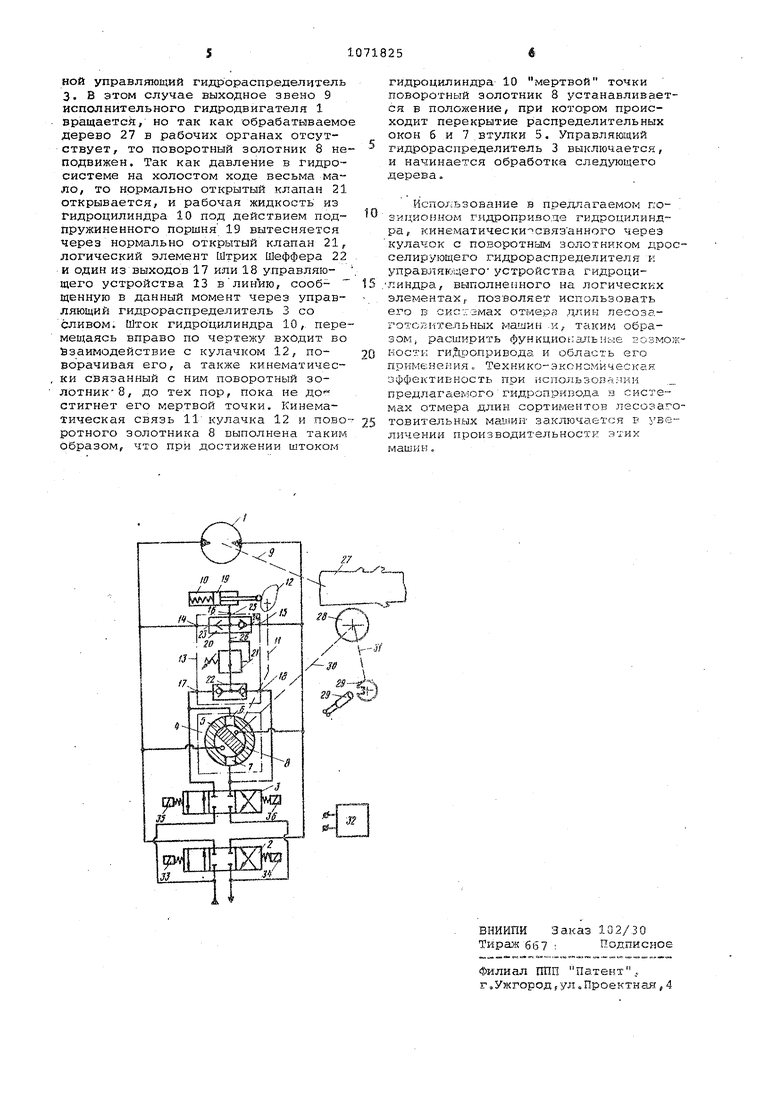
Изобретение относится к машиностроению и может быть использовано для точного отмера длин, в частнос ти в. системах отмера длин сортимен тов лесозаготовительных малдин, Известно устройство для отмера длин сортиментов при раскряжевке хлыстов, включающее прижимной и-по ющий механизмы, выдвижные упоры и демпфер, содержащий гидроцилиндр, поршневая и штоковая полости которого соединены, через двухпозиционный распределитель С напорным .клапа ном, кинематически связанным с при жимным механизмом l , Недостатком устройства является . возникновение больших, динамич еских нагрузок при ударе непосредственно на рабочей скорости в поворотные упоры, которые соединены с большой инерционной массой. Кроме того, упо ры не защищены от аварийных динами ческих нагрузок, которые могут воз кать при несрабатывании отдельных элементов,, а также из-за инерционности срабатывания гидроаппаратуры Известен позиционный гидропривод содержащий исполнительный гидродвигатель, направл5шщий и управляющий гидрораспределители, дросселирующий гидрораспределитель, выпол ненный в виде втулки с распределительными окнами и поворотного золотника, кинематически связанного с выходньпу звеном исполнительного гидродвигателя, при этом направляющий гидрораспределитель связан с исполнительным гидродвигателем непосредственно, а управляющий гидро.распределитель - через распределительные окна дросселирующего гидрораспределителя 2 „ Недостатком позиционного гидропривода является потеря информации об отмеряемой длине обрабатываемого дерева при проскальзывании рабочих органов лесозаготовительных машин. Целью изобретения является расши рение функциональной возможности гидропривода. Поставленная цель достигается тем, что позиционный гидропривод, содержаш.ий исполнительный гидродвигатель , направляющий и управляющий Гидрораспределители , дросселирующий гидрораспределитель, выполненный в виде втулки с распределительными окнами и поворотного золотника, кин матически связанного с выходным зве .ном исполнительного гидродвигателя, при этом направляющий гидрораспределитель связан с исполнительным гидродвигателем непосредственно, а управляющий гидрораспределитель через распределительные окна дросселирующего гидрораспределителя, снабжен гидроцилиндром, установленным с возможностью взаимодействия с поворотныг л. золотником посредством кинематической связи, включающей кулачок, мертвые точки которого соответствуют .перекрытию зо-. лотником распределительных окон втулки дросселирующего 1идрораспределителя, и управляющим устройством гидроцилиндра, входы которого подключены к рабочим KtMepciM исполнительного гидродвигателя, а выходы - к гидроцилиндру и управляга;цему гидрораспределителю . При этом гидроцилиндр выполнен одностороннего действия с подпружиHeHHHTvi поршнем, с; управляющее устройство гидроцилиндра выполнегно в виде последовательно соедине нных логического элемента ИЛИ, нормально открытого клапана и логического элемента Штрих Шеффера, при этом входы логического элемента ИЛИ соединены с рабочими камерами исполнительного гидродвигателя, а выходы - кепосредственно с гидроцилиндром и через логический элемент итрих Ыеффера - с управляющим гидрораспределителем, Сущность изобретения поясняется чертежом,- где представлена принципиальная схема позиционного гидропривода. Позиционный Г 1дропривод содержит исполнительный гидродвигатель 1, направляющий гидрораспределитель 2 и управляющий гидрораспределитель 3, дросселирующий глдрораспределитель 4, выполненный в виде .втулк.й 5 с распределительныг-..1к окна.ми б и 7 и поворотного золотника 8, кинематически связанного с выходным звеном 9 исполнительного ; илродзэигателя 1.. Позиционный гидропривод снабжен также гидроцилиндром 10, устаиовлен-ным с возможностью взаимодействия с поворотным золотмиком 8 посредством кинематической с.-зязи 11, включающей кулачок 12, мертвые точки которого соответствуют перекрытию распределительных окон б и 7 втулки 5 золотником 8 дроссзлиругощего гидрораспределителя 4. Гидроцилиндр 10 регулируется управляющим устройствсм 13 с входами 14 ч 15,. связанными с исполнительным гидродвигателем 1 и выходами 16-18 соответсгвенно подключeннfcLMи к гидроцнлимдру 10 и управляющему гидрораспределителю 3. Гидроциликдр 10 выполнен одностороннего действия с подпружиненным поршнем 19. Упра.вляюи;ее устройство 13 выполнено в Вйде гюсле.цоватсльно соединенных логического элемента ИЛИ 20, нормально открытого клапана 21 и лог 1чес:кого элемента lilTpHx Шефф.ера 22, Входы 23 и 24 логического элемента ИЛИ 20 соединзаы с вхо.цами 14 и 15 управляющего устройства 13 и соответственно с исполнительным гидродвигателем 1, один из его выходов 25 - с выходом 16 управляк,щего устройства 13 и гидроцилиндром а другой выход 26 через нормально открытый клапан 21 и логический элемент 22 Штрих Шеффера -. с выхода ми 17 и 18 управляющего устройства 13 и следовательно с управляющим ги рораспределителем 3. На выходном звене 9 исполнительного гидродвигателя 1 установлены р бочие органы (не показаны), осущес вляющие перемещение обрабатываемого дерева 27, взаимодействующего с мерным роликом 28. Мерный ролик 28 соединен с поворотным золотником 8 дросселирующего гидрораспределителя 4 и датчиком 29 импульсов кинематическими связями 30 и 31. Регистрация и пyльcoв осуществляет блоком 32 управления. Блок 32 упра ления электрически евязан с электр магнитфми 33 и 34 направляющего гид рор.с) определителя 2 и электромагнитами 35 и 36 управляющего гидрорасп,еделитёля 3., Позиционный гидропривод работает следующим образом. По сигналу от блока 32 управленн вклЕОчается один из электромагнитов 33 или 34 направляющего гидрораспределителя 2, например электромагнит 33. Рабочая жидкость от источника гидравлической энергии (не показан) под давлением поступает к исполнительному гидродвигателю 1 Одновременно, рабочая жидкость поступает на вход 14 управляющего, устройства 13 и через логический элемент ИЛИ 20 к .нормально открытому, клапану 21, закрывая его, и выходу 16 управляющего устройства 13. Пор1чень 19 гидроцилиндра 10 смещается влево по чертежу и выходит из взаимодействия с кулачком 12 и, таким образом, разрывается кинематическая связь 11 между гидроцилиндром 10 и поворотным золотни ком 8. дросселирующего гидрораспреде лителя 4. Под действием сил давления рабочей жидкости выходное звено 9 исполнительного гидродвигателя 1 вращается, перемещая с пp olдью рабо чих органов обрабатываемое дерево 27. При своем движении обрабатываемое дерево 27 вращает мерный ролик 28, который, в свою очередь, посредством кинематических связей 30 и 31приводит во вращение поворотный золотник 8 и датчик 29 им- . пульсов. По мере перемещения обрабатываемого дерева 27 датчик 29 импульсов подает сигналы, пропорциональные величине перемещения на блок 32 управления. Частота сигналов не зависит от проскальзы-. вания рабочих органов и определяется только взаимодействием обрабатываемого дерева 27 и мерного ролика 28. В случае необходимости реверса исполнительного гидродвигателя 1 подается команда на включение электромагнита 34 направляющего гидрораспределителя 2. По достижении заданной длины блок 32 управления подает команду на выключение электромагнита 33 и включение электромагнита 35. При этом направляющий гидрораспределитель 2 устанавливается в исходное нейтральное положение, а управляющий гидрораспределитель 3 включается, останавливая исполнительный гидродвигатель 1 г;рк перекрытии распределительных 6 и 7 поворотным золотыикодм 8. При перебеге дерева 27 откооителыю заданной дайны рабочая ккдкость от источника гидравлнческоп гп ергии через управляющий гидрораспуеделитель 3 поступает под давлением к одному из распределительных окон и и 7 втулки 5 в за3;:ciir ;ocTi-; ;:i.:; .::0чон;ия злектромагмитоз 35 и 36 и, через поворот:чый золотп ;к 8, поступает-к испол -:ительног:у гндродвигателю 1. Слив жидкости осуществляется, например, из окна 6 втулки 5 противоположного окну 7, сообгценно.гу с напором. 1сполнителы : л; гидродвигатсль 1 itpcизводит пере.;е1декие обрабатыраемого дерева 27 до зада.нной длины. При этом за счет отр цательной обратной связи между выходным звеном 9, обрабатываемь м деревом 27, мерным роликом 28 и поворотньам золотником 8, осу11;ествляется перемещение поворотного золотп5-;ка 8 вплоть до перекрытия им распределительных окон б и 7 зтулки 5, Па этом стмер длин;. обрабатыБае,;ото дерева 27 заканчивае; ся. После распиловки обрабатываег.юго дерева 27 на сортименты в рабочих органах лесозаготовительной машины остается вершина, которая удаляется путем выключения управляющего гидрораспределктеля 3 и включения направляющего гндрораспределителя 2. При этом поворотный золотник 8 зан1:мает произвольное положение относительно распределительных окон б к 7 втулки 5. Однако при обработке следующего дерева необходимо, чтобы по.воротш ай золотник 8 находился в положении, в котором он перекрывает распределительные окна б и 7 втулки 5, так как именно от него блок 32 управления отсчитывает координату отмеряемой длины. Это достигаэтся тем, что выключается направляющий гидрораспределитель 2 и включается в любую позицию отличную от нёйтраль
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТЫРЕХЛИНЕЙНЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И ЦЕНТРАЛЬНЫМ ПРИВОДОМ МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА | 2007 |
|
RU2353825C1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ДРОССЕЛИРУЮЩИЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И ЦЕНТРАЛЬНЫМ ПРИВОДОМ МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА И ВЫСОКИХ ДАВЛЕНИЙ | 2008 |
|
RU2375610C1 |
| Устройство для подачи и точного останова лесоматериалов | 1984 |
|
SU1211036A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И ЦЕНТРАЛЬНЫМ ПРИВОДОМ МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА С РЕАЛИЗАЦИЕЙ ФУНКЦИИ АКТИВНОГО ДЕМПФИРОВАНИЯ | 2008 |
|
RU2374506C1 |
| Электрогидравлический позиционный привод | 1984 |
|
SU1218177A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
| Распределительное устройство шаговогогидРОдВигАТЕля | 1979 |
|
SU848777A1 |
| Позиционный электрогидравлический привод | 1975 |
|
SU561013A1 |
| Четырехлинейный гидрораспределитель с плоским поворотным золотником | 2002 |
|
RU2219353C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
1. ПОЗИЦИОННЫЙ ГИДРОПРИВОД, содерх ащий исполнитель-ный гидродвигатель , направляющий и управляющий гидрораспределители, дросселирую- : щий гидрораопределитель, выполненньй . в виде втулки с распределительными окнами и поворотного золотника, кинематически связанного с выходным звеном исполнитель кого- гидродвигателя, при этом направляющий гидрораспределитель связан с исполнительным гидродвигателем непосредственно, а управляющий гидрораспределитель - через распределительные окна дросселирующего гидрораспределителя, отличающийся тем, что, с целью .расширения функциональных возможностей, позиционный гидропривод снабжен гидроцилиндром, установленным с возможностью взаи,модействия с поворотным золотником посредством кинематической связи, включающей кулачок, мертвые точки которого соответствуют перекрытию золотником распределительных окон втулки дросселирующего гидрораспределителя, и управляющим устройством гидроцилиндра, входы которого подключены к рабочим камерам исполнительного гидродвигателя, а ,выходы - к гидроцилиндру и управляющему гидрораспределителю. 2. Гидропривод по п. 1, отлиiS чающийся тем, что гидроцилиндр выполнен одностороннего действия с подпружиненным поршнем, а управляющее устройство гидроцилиндра выполнено в виде последовательно соединенных логического элемента ИЛИ, нормально открытого- клапана и логического элемента Штрих Шеффера., при этом входы логического элемента ИЛИ соединены с рабочими камерами исполнительного гидродвигателя,а выходы - непосредственно с гидроцилиндром и через логический элемент Штрих Шеффера -с управляющим гидрою распределителем. 01
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидропривод механизма перемещения деревьев | 1980 |
|
SU926380A2 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Позиционный электрогидравлический привод | 1975 |
|
SU561013A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
