1
Изобретение относится к средствам автоматизации машин и производственных процессов, в частности к позиционным приводам промьшшенных роботов.
Цель изобретения - упрощение конструкции и повышение надежности.
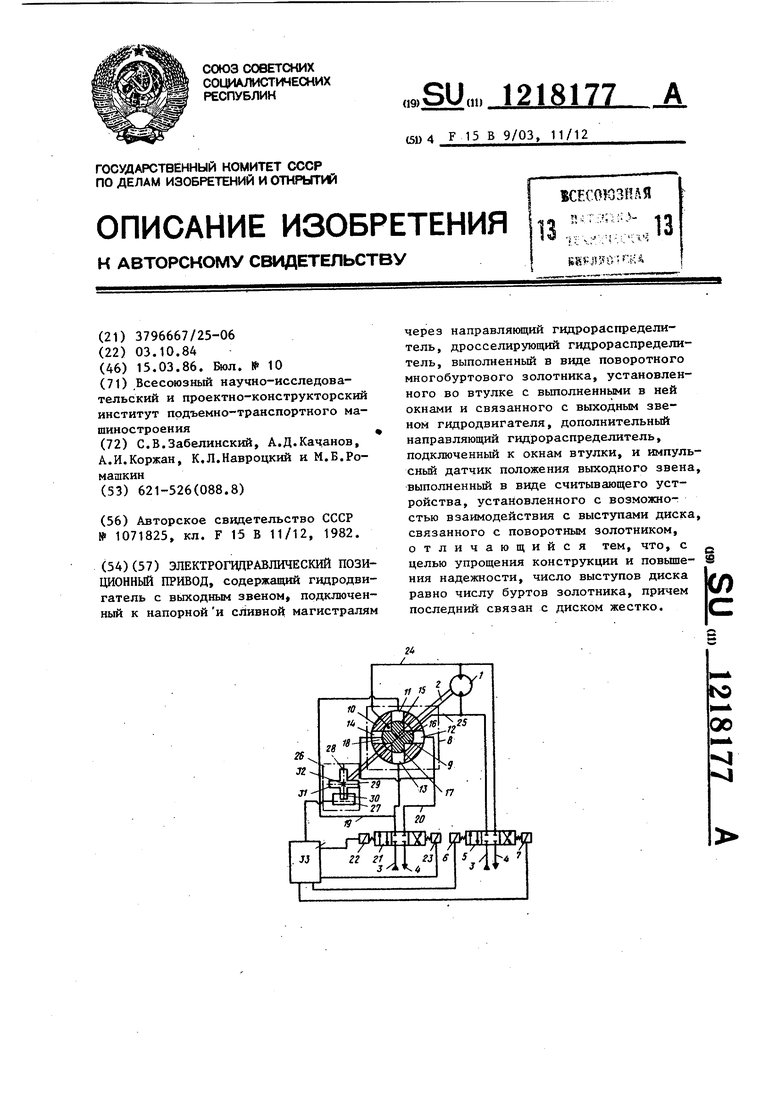
На чертеже представлена принципиальная схема привода.
Электрогидравлический позиционный привод содержит гидродвигатель 1 с выходньич звеном 2, подключенный к напорной и сливной магистралям 3 и 4 через трехпозиционный направляющий гидрораспределитель 5 с двумя электрмагнитами 6 и 7, дросселирующий гидрораспределитель 8, выполненный в виде поворотного многобуртового золотника 9, установленного во втулке 10 с выполненными в ней окнами 11 - 14. - Золотник 9 жестко связан с выходным звеном 2 и выполнен с четырьмя буртами 15 - 18. Окна 11 - 14 объединены попарно линиями 19 и 20 и подключены к дополнительному трехпозицион- ному гидрораспределителю 21 с двумя электромагнитами 22 и 23, а линиями 24 и 25 - к гидродвигателю 1. Кроме того, привод включает импульсный датчик 26, выполненный в виде считывающего устройства 27, установленного с возможностью взаимодействия с выступами 28-31 диска 32, жестко связанного с поворотным золотником 9, причем число выступов 28-31 равно числу буртов 15 - 18 ( в данном случае четырем). Считывающее устройство 27 подключено к блоку 33 управления, который, в свою очередь, подключен к электромагнитам 6 и 7 и 22 и 23 гидрораспределителей 5 и 21.
Привод работает следующим образом.
В исходном положении электромагниты 6 и 7 и 22 и 23 обесточены, и гидрораспределители 5 и 21 находятся в нейтральной позиции, в которой гидродвигатель 1 oTKJD04eH от напорной и сливной магистралей 3 и 4, и выходное звено 2 неподвижно.
Для обеспечения вращения сигнал с блока 33 управления поступает, например, на электромагнит 6 гидрораспределителя 5, в результате этого гидрораспределитель 5 устанавливается в крайнюю левую по чертежу позицию, и напорная и сливная магистрали 3 и 4 подключаются к гидродвигателю 1, и выходное звено 2 послед8177
него начинает двигаться. Вместе с ним начинают вращаться жестко связанные с ним золотник 9 и диск 32. При этом выступы 28 - 31 взаимодей5 ствуют со считьшающим устройством 27, которое формирует электрические импульсы, количество которых характеризует координату выходного звена 2 гидродвигателя 1. Эти импульсы посту0 пают в блок 33 управления, в котором происходит их счет и сравнение с заданным количеством импульсов.
Если заданная координата точки позиционирования кратна Четному чис15 лу угловых расстояний между буртами 15 - 18 золотника 9, следовательно, четному числу импульсов считьшающе- го устройства 27, то при совпадении заданного и отработанного количества
20 импульсов по сигналу, поступающему от блока 33 управления, происходит выключение электромагнита 6, и гидрораспределитель 5 устанавливается в исходное положение. При этом сигнал
25 от блока 33 управления поступает на электромагнит 22 гидрораспределителя 21 и последний устанавливается в крайнюю левую по чертежу позицию, благодаря чему гидродвигатель 1 сообщается
3Q с напорной магистралью 3 через зазоры между окнами 11 и 13 втулки 10 и буртами 15 и 17 золотника 9, а со сливной магистралью 4 - через зазоры между окнами 12 и 14 и буртами 16 и 18. Движение выходного звена 2 гидродвигателя 1 происходит до тех пор, пока |окна 11 и13и12и14 не- перекроются буртами 15и17и16и18. При этом привод обеспечивает парирование внешних воздействий, а выступ 28 или 30 взаимодействует со считьгоающим устройством 27.
35
40
Если заданная координата точки позиционирования кратна нечетному целому числу угловых расстояний между буртами 15-18 золотника 9 и нечетном J числу импульсов, формируемых считывающим устройством 27, то при совпадении количества заданных и отработанных импульсов по сигналу блока 33 происходит выключение электромагнита гидрораспределителя 5 и включение электромагнита 23 гидрораспределителя 21, в результате.этого гидрораспределитель 5 устанавливается в исходную позицию, а гидрораспределитель 21 -.в крайнюю правую по чертежу позицию, благодаря чему гидродJ1
вигатель 1 сообщается с напорной ма- гистралью 3 через зазоры между окнами 12 и 14 втулки 10 и буртами 16 и 18 золотника 9, а со сливной магистралью 4 - через зазоры между окнами 11 и 13 и буртами 15 и 17, При перекрытии окон 11-14 втулки 10 буртами 15 - 18 золотника 9 происходит остановка и фиксация выходного звена 2 с парированием внешних воз- действий,
Изменение направления движения выходного звена 2 осуществляется подачей сигнала на электромагнит 7. Прзи- ционирование выходного звена 2 осуществляется так же, как и при включении электромагнита 6,
774
Таким образом, жесткая связь между диском 32 и золотником 9 и совпадение числа выступов 28 - 31 с числом буртов 15 - 18 позволяет осуществлять позиционирование с шагом, пропорциональным угловому расстоянию между буртами 15 - 18 поворотного золотника 9, и тем самым исключить элемент кинематической связи между импульсным датчиком 26 и дросселирующим гидрораспределителем 8, что позволяет упростить конструкцию блока 33 управле-ч ния и приводи в целом по сравнению с выполнением диска 32 с одним выступом. Исключение кинематической связи между дросселирующим гидрораспределителем 8 импульсным датчиком 26 повышает и надежность привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электрогидравлический привод | 1975 |
|
SU561013A1 |
| Позиционный гидропривод | 1982 |
|
SU1071825A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ, ЧУВСТВИТЕЛЬНЫЙ К НАГРУЗКЕ | 2020 |
|
RU2759190C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| ГИДРОПРИВОД С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2722767C1 |
| Револьверная головка | 1983 |
|
SU1090509A1 |
| ШАГОВЫЙ ПРИВОД С ОБЪЕМНЫМ ДОЗИРОВАНИЕМ | 2006 |
|
RU2347953C2 |
| Гидравлический шаговый привод | 1971 |
|
SU477260A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
| Позиционный гидропривод | 1982 |
|
SU1071825A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
