со со ел
Изобретение относится к автоматическому регулированию и может найти использование в системах управления инерционными объектами, например поворотными стендами, в промышленны роботах.
Известен электрический регулятор содержащий трехпозиционный релейный элемент, охваченный периодической обратной связью с изменяемой пбстояной времени .
Недостаток. регулятора состоит в том, что величина перерегулирования по скорости в переходных процессах зависит от начального возму1пения и не может быть задана заранее до начала работы. Это ведет, например, к непроизводительнн м энергозатратам в переходном процессе при управлении инерционнымиобъектами.
Наиболее близким к предлагаемому по технической сущности является регулирующее.устройство, содержащее первый сумматор, выходы которого через релейный элемент и напрямую соединены со . входами второго сумма-тора, выход которого через интегратор соединен со входом первого сумматора С23,
Величина перерегулирования при отработке начального возмущения по скорости в этом устройстве также растет с увеличением возмущения. Кроме того, при управлении инерционными объектами необходимо согласовать параметры импульсного режима работы релейного лемента (скользящий режим) с частотными характеристиками силовых исполнительных орга,нов. При этом не представляется возможным одновременно удовлетворит требования к параметрам скользящего режима (длительность управляющего импульса, частота, скважность) и обеспечить заранее выбранную величину перерегулирования в переходном процессе.
Цель изобретения - обеспечение возможности независимого регулирования -таких характеристик переходного процесса, как величина перерегулирования и параметры скользящего режима .
Поставленная цель достигается тем, что в устройство, содержащее первый сумматор, соединенный первым выходом со входом трехпозиционного релейного элемента, и второй сумматор, выход которого через ин.тегратор соединен со входом первого сумматора, дополнительно введены ограничитель и последовательно соединенные усилитель с зоной нечувствительности, подключенный входом ко второму выходу первого сумматора, .и коммутатор, соединенный выходом с первым входом второго сумматора, а управляющим входом - с выходном
трехпозиционного релейного элемента второй выход интегратора через ограничитель подключен ко второму входу второго сумматора.
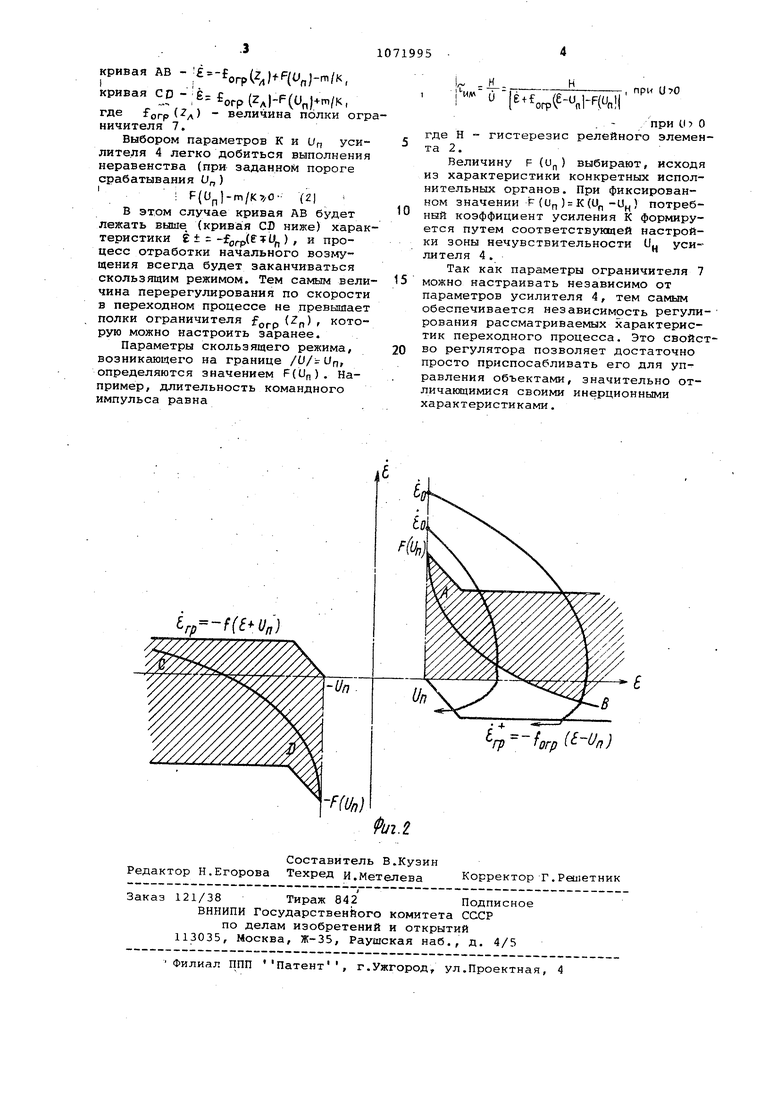
На фиг, 1 представлен рез улятор для системы управления инерционным объектом; на-фиг. 2 - фазовая плоскость .
Регулятор (фиг. 1) содержит первый сумматор 1, первый выход которого через трехпозиционный релейный элемент 2 подключен к управлякхцему входу коммутатора 3. а второй выход - через последовательно соединенные усилитель 4 с зоной нечувствительности и коммутатор 3 соединен с первым входом второго сумматора 5 Выход сумматора 5 соединен со входом интегратора б. Первый выход интегратора 6 соединен со входом первого сумматора 1, а второй - через ограничитель 7 соединен со вторым входом сумматора 5.
Динамика регулятора описывается следующей системой уравнений:
g -mrf-CUJ ,
Z.:F( (Z),
.,
(o(u,g(o| e,2(o|-o
(11
где 6 Z
- ошибка регулирования; сигнал обратной связи;
U управляющий сигнал; М- нормированный трехпозиционный релейный элемент 2 с порогом срабатывания Uj, ; Р(и| - характеристика усилителя 4 коэффициентом усиления К и зоной нечувствительности U fpi-plzl- характеристика ограничителя
с зоной линейности gg- начальное возмущение по
скорости.
При отработке начальных возмущений теоретически гаогут возникнуть три типа движений, отличающиеся режимом работы релейного элемента: только скользящий режим; сначала непрерывный, а затем скользящий режим; только непрерывный режим,
Первый тип возникает, если начальное возмущение удовлетворяет условие /eoAF(Un)/ Второй и третий - когда (e((Un).
На фиг. 2 штриховкой обозначены области, где возможно возникновение скользящего режима. Границы оконча.нил скользящего режима
).()
определяются только параметраь-ш ограничителя.
Кривые АВ и СБ соответстЕ;уют моменту окончания непрерывного режима работы релейного элемента при начальном возмуще ши (Up,). Существенно-, что эти кривые имеют асимптотыt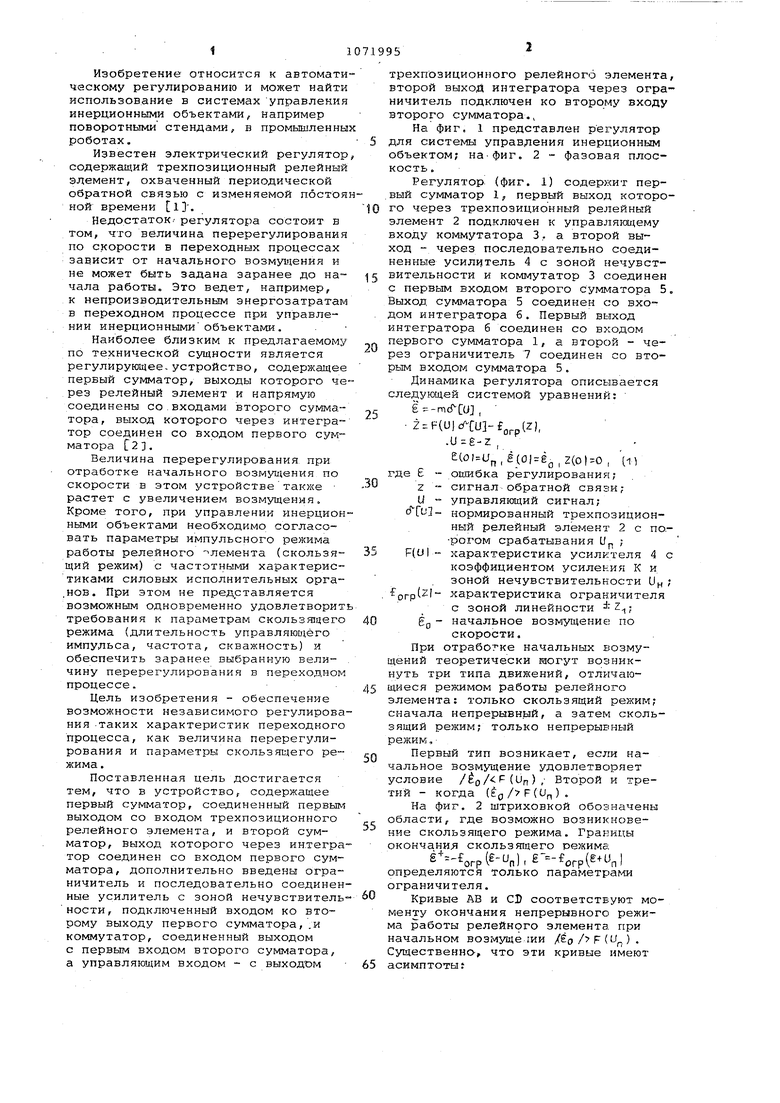
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1644086A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1608616A1 |
| Система стабилизации | 1989 |
|
SU1798764A1 |
| Релейное управляющее устройство | 1981 |
|
SU1004965A1 |
| Релейный регулятор | 1975 |
|
SU809054A1 |
| Способ управления | 1975 |
|
SU805247A1 |
РЕЛЕЙНЫЙ РЕГУЛЯТОР, содержащий первый сумматор, соединенйый первым выходом с входом трехпозиционного релейного элемента, и второй сумматор, выход которого через интегратор соединен с входом первого сумматора, отличающийс я тем, что, с целью обеспечения возможности независимого регулирования характеристик переходного процесса, в него введены ограничитель и последовательно соединенные усилитель с зоной нечувствительности, подключенный входом к второму выходу первого сумматора, и коммутатор, соединенный выходом с первым входом второго сумматора, а управляющим входом - с выходом трехпозиционного релейного элемента, второй выход интегратора через ограничитель подключен к второму входу второго сумс матора . (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ 1914346, кл.G 05 В 11/18, опублик | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Релейное регулирующее устройство | 1977 |
|
SU631865A1 |
| G, Q5 В 11/42, 1978 (прототип) . | |||
