(54) СПОСОБ УПРАВЛЕНИЯ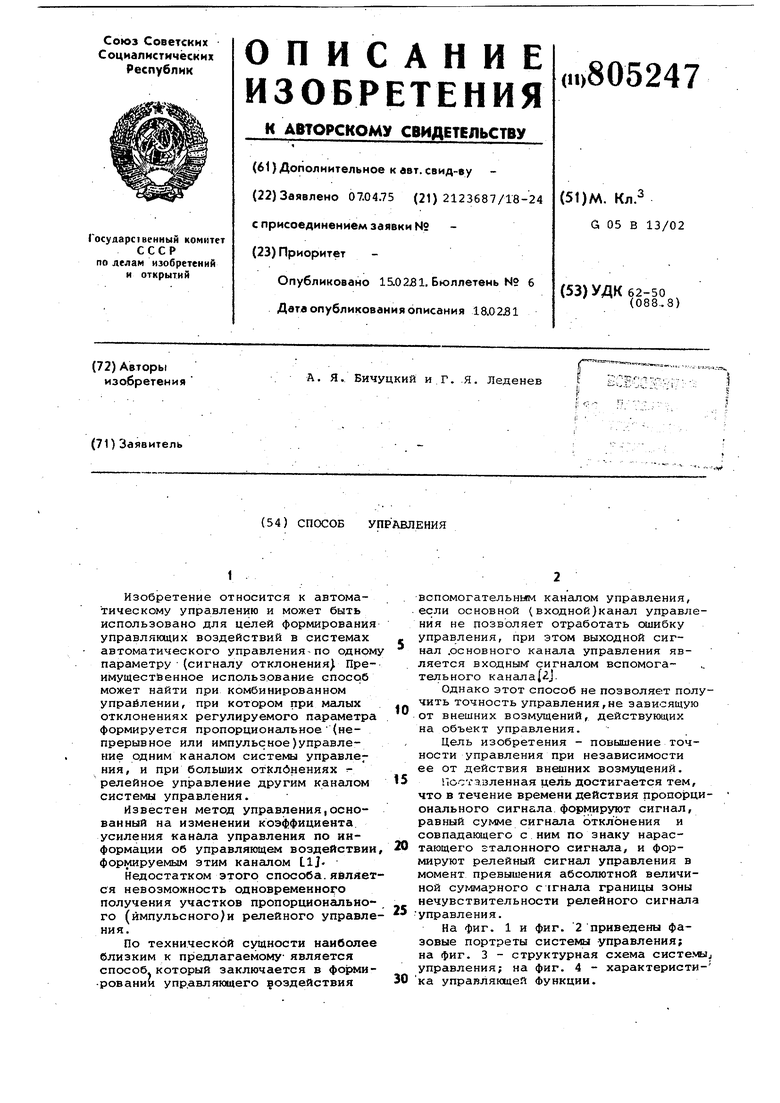
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Система стабилизации | 1989 |
|
SU1798764A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| Релейный регулятор | 1975 |
|
SU809054A1 |
| Релейный регулятор | 1982 |
|
SU1071995A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2015 |
|
RU2606149C2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
1
Изобретение относится к автоматическому управлению и может быть использовано для целей формирования управлянвдих воздействий в системах автоматического управления-по одном параметру (сигналу отклонения) Преимущественное использование способ может найти при комбинированном упрайлении, при котором при малых отклонениях регулируемого параметра формируется пропорциональное (непрерывное или импульсное)управление одним каналом системы управления, и при больших отклйнениях релейное управление другим каналом системы управления.
Известен метод управления,основанный на изменении коэффициента усиления канала управления по информации об управляющем воздействии формируемым этим каналом L1JНедостатком этого способа.является невозможность одновременного получения участков пропорционального (импульсного)и релейного управления.
По технической сущности наиболее близким к предлагаемому является способ, который заключается в форми-ровании управляющего воздействия
вспомогательным каналом управления, если основной (входной}канал управления не позволяет отработать ошибку управления, при этом выходной сигнал .основного канала управления является ВХОДНЫМ сигнсшом вспомогательного канала(Я.
Однако этот способ не позволяет получить точность управления,не зависящую
0 от внешних возмущений, действующих на объект управления.
Цель изобретения - повышение точности управления при независимости ее от действия внешних возмущений5
11остэ.зленная цель достигается тем, что в течение времени действия пропорционального сигнала формируют сигнал, равный сумме сигнала отклонения и совпадакнцего с ним по знаку нарас0тающего эталонного сигнала, и формируют релейный сигнал управления в момент превышения абсолютной величиной суг марного с ггнала границы зоны нечувствительности релейного сигнала
5 -управления.
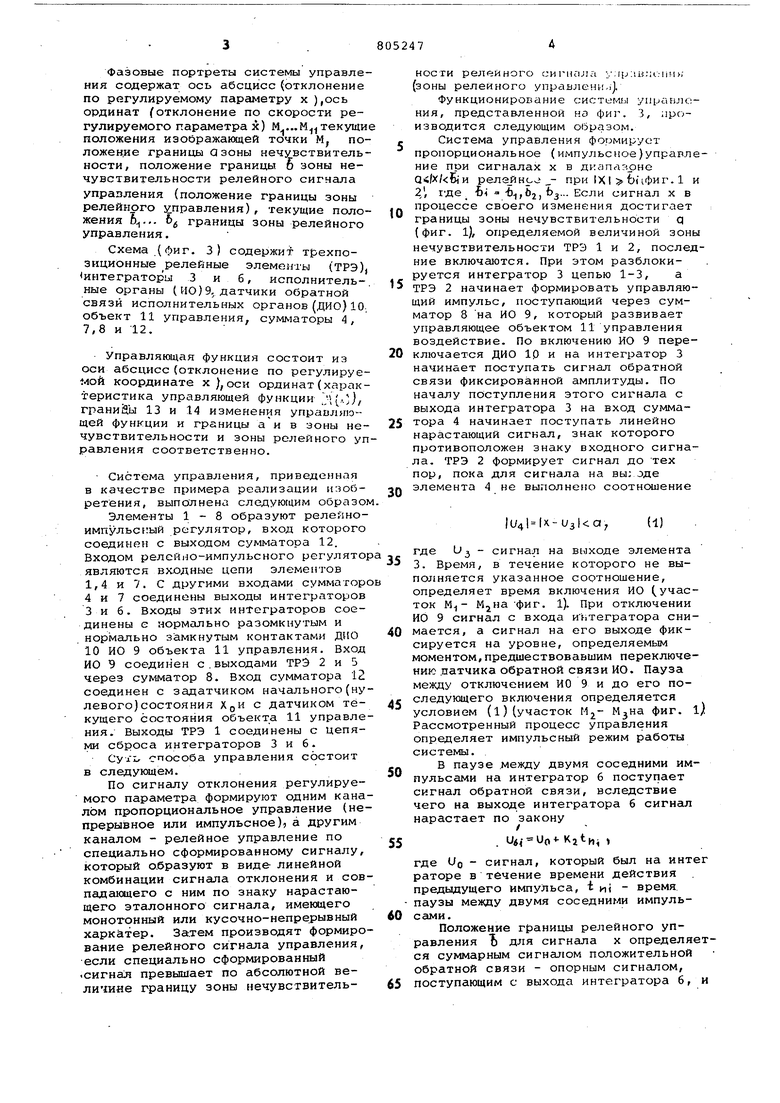
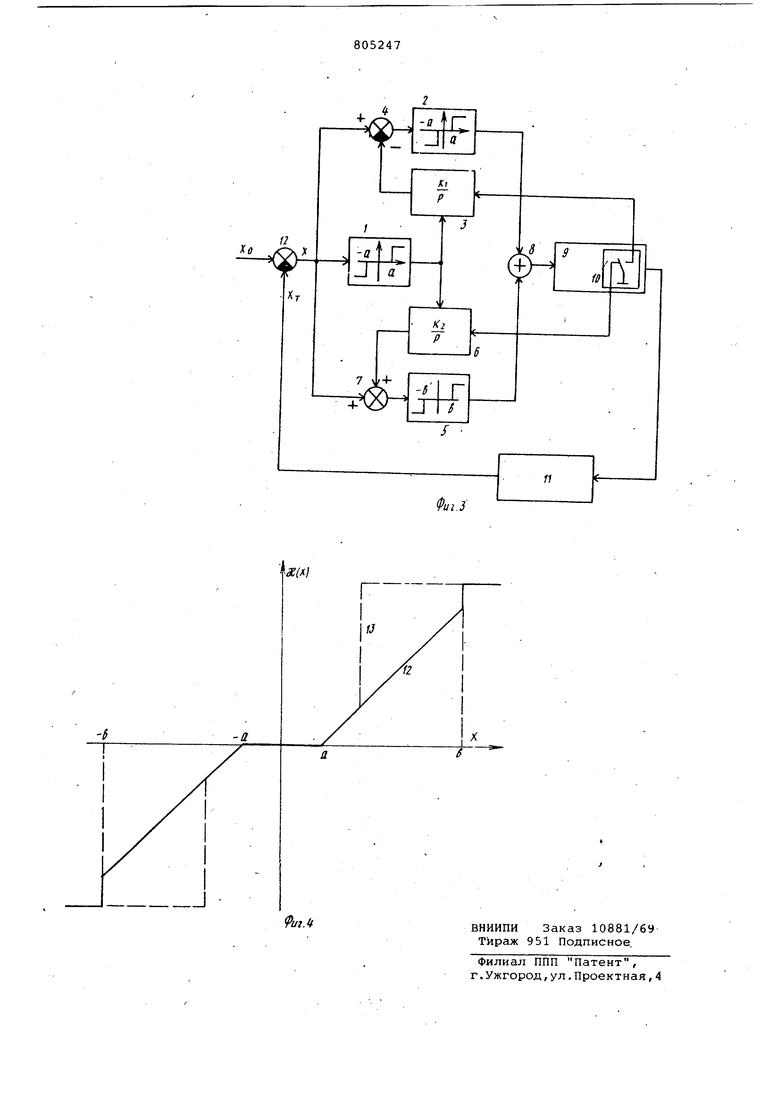
На фиг. 1 и фиг. 2 приведены фазовые портреты систекы управления; на фиг. 3 - структурная схема системы,, управления; на фиг. 4 - характеристи0 ка управляющей функции.
Фазовые портрета системы управления содержат ось абсцисс (отклонение по регулируемому параметру х ),ось ординат (отклонение по скорости регулируемого параметра х) М...М текущи положения изображающей точки М, положен.ие границы а зоны нечувствительности, положение границы 6 зоны нечувствительности релейного сигнала управления (положение границы зоны релейного управления), текущие положения 5.,. 0 границы зоны релейного управления.
Схема (фиг. 3) содержит трехпозиционные релейные элементы (ТРЭ) (интеграторы 3 и 6, исполнитель- ные органы ( ИО) 9, датчики обратной связи исполнительных органов (ДИО) 10. объект 11 управления, сумматоры 4, 7,8 и 12.
Управляющая функция состоит из оси абсцисс (отклонение по регулируемой координате х),оси ординат (характеристика управляющей функции (.), границы 13 и 14 изменения упратипощей функции и границы аи в зоны нечувствительности и зоны релейного управления соответственно.
Система управления, приведенная в качестве примера реализации изобретения, выполнена следующим образом
Элеме-нты 1-8 образуют релейноимпульс :ый регулятор, вход которого соединен с выходом сумматора 12. Входом релсйно-импульсного регулятор являются входные цепи элементов 1,4 и 7. С другими входами сумматоро 4 и 7 соединены выходы интеграторов 3 и 6. Входы этих интеграторов соединены с нормально разомкнутым и нормально замкнутым контактами ДИО 10 ИО 9 объекта 11 управления. Вход ИО 9 соединен с.выходами ТРЭ 2 и 5 через сумматор 8. Вход сумматора 12 соединен с задатчиком начального(нулевого) состояния ХдИ с датчиком текущего состояния объекта 11 управления. Выходы ТРЭ 1 соединены с цепями сброса интеграторов 3 и 6.
Сул, способа управления состоит в следуквДем.
По сигналу отклонения регулируемого параметра формируют одним каналом пропорциональное управление (непрерывное или импульсное), а другим каналом - релейное управление по специально сформированному сигналу, который образуют в виде линейной комбинации сигнала отклонения и совпаданяцего с ним по знаку нарастающего эталонного сигнала, имеющего монотонный или кусочно-непрерывный харкатер. Затем производят формирование релейного сигнала управления, если специально сформированный сигнал превышает по абсолютной величине границу зоны нечувствительнести релейного с:игиала ;ip; ii;ii;ii i ; (зоны релейного управлени,..
Функционирование системы уиравлсния, представленной но фш. 3, ;ipcjизводится следующим образом.
Система управления Формирует пропорциональное (импульсное)упрарлние при сигналах х в диапазоне при 1X1 ЬиФиг. 1 2, 1де -bi , t... Если сигнал х в процессе своего изменения достигает границы зоны нечувствительности q (фиг. 1), определяемой величиной зон нечувствительности ТРЭ 1 и 2, последние включаются. При этом разблокируется интегратор 3 цепью 1-3, а ТРЭ 2 начинает формировать управляющий импульс, поступающий через сумматор 8 на ИО 9, который развивает управляющее объектом 11 управления воздействие. По включению ИО 9 переключается ДИО 10 и на интегратор 3 начинает поступать сигнал обратной связи фиксированной амплитуды. По началу поступления этого сигнала с выхода интегратора 3 на вход сумматора 4 начинает поступать линейно нарастающий сигнал, знак которого противоположен знаку входного сигнала. ТРЭ 2 формирует сигнал до тех пор, пока для сигнала на вы; оде элемента 4 не выполнено соотношение
(1)
IU4l l -L3l a;
где -з сигнал на выходе элемента 3. Время, в течение которого не выполняется указанное сортнощение, определяет время включения ИО (участок М - MjHa фиг. 1). При отключении ИО 9 сигнал с входа интегратора снимается, а сигнал на его выходе фиксируется на уровне, определяемым моментом,предшествовавшим переключению датчика обратной связи ИО. Пауза между отключением ИО 9 и до его последующего включения определяется условием (1) (участок фиг. l Рассмотренный процесс управления определяет импульсный режим работы системы.
В паузе ,между двумя соседними импульсами на интегратор 6 поступает сигнал обратной связи, вследствие чего на выходе интегратора 6 сигнал
нарастает по закону
/ U . ,
где UQ - сигнал, который был на инте раторе в течение времени действия предыдущего импульса, t ц( - время паузы между двумя соседними импульсами.
Положение границы релейного управления Ъ для сигнала х определяеся суммарным сигналом положительной обратной связи - опорным сигналом, поступающим с выхода интегратора 6, волнчм iiiii i;o).t-a срабатывания в ТРЭ Ьеличкиа 6 определяется выражением t fc-U6, где -текущее значение сигнала н выходе элемента 6. Иначе,если рассматривать величин зоны релейного режима относительно сигнала х, то граница зоны релейног управления смещается в направлении начала координат, т. е. при первом включении ИО (участок на фиг.1) граница зоны релейно,го управлениязанимает положение -Ь.то в течение паузы (участок М -П граница смещается и в течение временидействия сле дующего импульс а участок М:-Ы занимает положение т.д. Если изображающая точка достигае границы релейного управления (точка М);го, начиная с этого .момента, управление только релейное ввиду того, что выполняется условие (1). При формировании релейного управления в течение времени действия импульса (участок М)граница 6 занимает положение €. После включения ИО 9 (т. Mg) граница -6 вновь начинает смещаться в сторону начала координат и в некоторый момент встречается с изображающей точкой (т.Мд), траектория движения которой определяется величиной действую щих возмущающих сил. После встречис изображающей точкой грани;и,а 6 ост танавливается в положении 6 и далее процесс повторяется. Изменение положения Границы Л ограничивается максимально достигаемым сигналом на интеграторе 6. Этот сигнал выбирается, исходя из соображений устойчиво ти установившегося управления таким образом, чтобы положение максимального отклонения границы Ь- 6 было н участке а-в, т. е. . а Ьг„ах Ь В зависимости от коэффициента К характеризующего темп нарастания опорного сигнала , и, следователь но, скорости смещения границы в, пр X О встречи точки М с границами b , bj, b , .. . происходят или только при X о(фиг . l)j или вначале при (фиг.2),- а затем при . Процессы, показанные на фиг. 2, воз можны при больших значениях К, а процессы, показанные на фиг. 1 при Мсшых величинах Kj. При больших Kj .происходит демпфирование колебаний по скорости (X (47 Х М9 X ) устанавливается режим типа скольжени (от точки фиг. 2), в котором отрабатывается рассогласование по регулируемому параметру. После этого вблизи положения равновесия устанав ливается стацио 1арный процесс управ ления. Установка границы b в исходное положение производится, когда сигнал X в процессе своего изменения дости1-ает границы а, а обн/ление интегратора 3 производится п. и -а X а. При действии постоянного внешнего возмущения движение системы, представленной на фиг. 3(без учета ее неидеальностей типа запаздывания, гистерезисов релейных элементов и пр.). в параметрах х X может быть описано следующими безразмерными уравнениями: при и при импульсном управлении уравнением РК , КдХо-РК, , , , ,, , кДХо-х)..Г Кд1х-а) (2) и при релейном управлении - уравнением ,. ., Кд-Р , г. KgXo-K lKg-P) , . ()-П. - Л Т-кГрГ- где Р - величина внешнего возмущения. Kg- коэффициент передачи ИО (эффективность ИО). Из уравнения (2/следует, что установившаяся скорость ухода системь-, от начала координат имеет величину .К а установившаяся скорость приведения системы к началу координат, определяемая действием лодвижной границы зоны релейного управления, определяется уравнение;. Из анализа выражения(5Jследует, что при любом возмущении )система всегда приводится в окрестность начала- координат, где поддерживаются установившиеся колебания. Формула изобретения Способ управления, заключающийся в формировании пропорционального сигнала управления при нарастании абсолютного значения сигнала отклонения регулируемого параметра, -с последующим формированием релейного сигнала управления, отличающийся тем, что, с целью повыше ния точности управления при независимости от действия внешних возмущений, в течение времени действия пропорционального игнала формируют сигнал, равный сумме сигнала отклонения и совпадающего с ним по знаку нарастающего этгпонного сигнала,и формируют релейный сигнал управления в момент превышен-sTP абсолютной величиной суммарного сигнала границы зоны нечувствительности релейного сигнаша управления.
Источники информации, принятые во внимание при экспертизе
