(54) РЕЛЕЙНЫЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Релейный регулятор | 1982 |
|
SU1071995A1 |
| Нелинейный преобразователь для систем с переменной структурой | 1982 |
|
SU1043593A1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1257605A1 |
| Способ управления | 1975 |
|
SU805247A1 |
| Релейное управляющее устройство | 1972 |
|
SU443363A1 |
| Следящая система с автокоммутируемым контуром отрицательной обратной связи | 1982 |
|
SU1062647A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
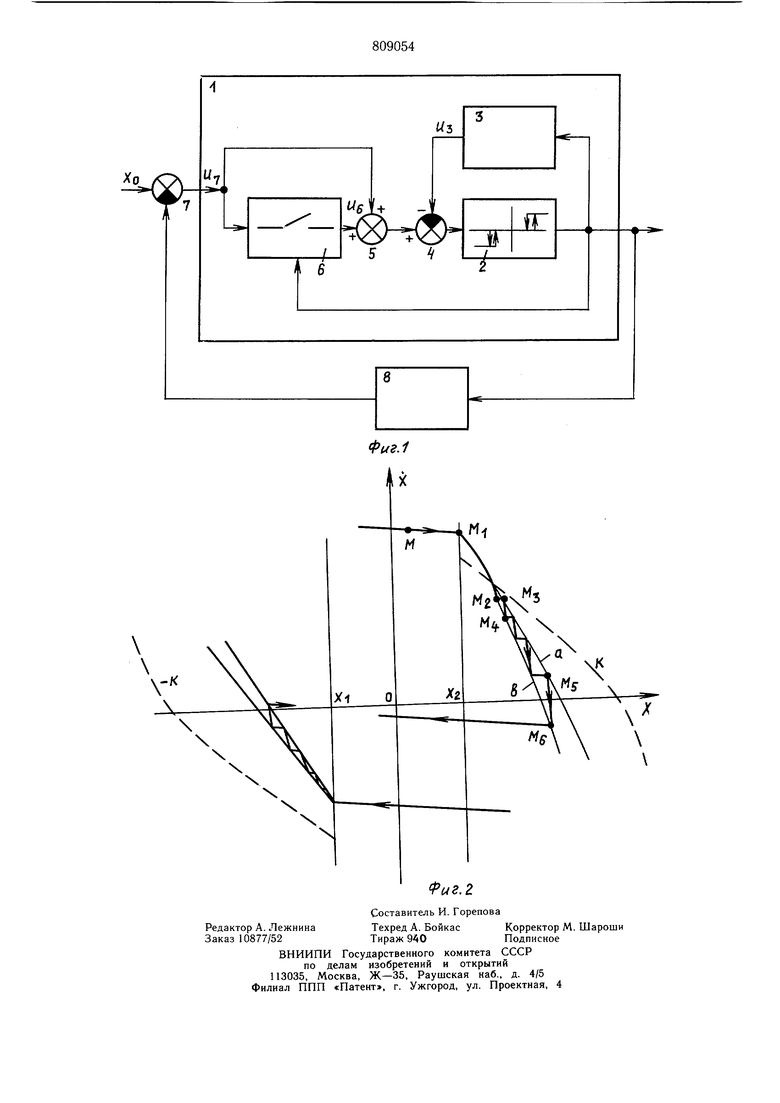
Изобретение относится к техническим средствам управления и регулирования и может быть использовано в релейных системах управления и регулирования широкого назначения, переходные процессы которых включают скользящие режимы. Известны релейные регуляторы, содержащие релейные элементы, охваченные инерционными обратными связями, которые обеспечивают для достижения заданных технических характеристик скользящие режимы управления 1. Однако такие устройства не позволяют получить высокого качества управления при действии внешних возмущений. Наиболее близким к предлагаемому является релейный регулятор, содержащий релейный элемент с инерционным элементом в цепи отрицательной обратной связи и суммирующий элемент 2. Недостаток данного регулятора заключается в невысокой стабильности по отношению к внешним возмущениям (сигналам помехи, присутствующим в сигнале ощибки управления), если гистерезис релейного элемента имеет малую величину, а также он не позволяет получить экономичных процессов управления, если гистерезис релейного элемента имеет больщую величину. Цель изобретения - повышение стабильности работы устройства к внешним возмущениям. Указанная цель достигается тем, что в релейный регулятор, содержащий релейный элемент с инерционным элементом в цепи отрицательной обратной связи и суммирующий элемент, один вход которого соединен с выходом инерционного элемента, а выход - со входом релейного элемента, введен управляемый ключ и второй суммирующий элемент, один вход которого соединен с входной клеммой регулятора непосредственно, а второй - через управляемый ключ, выход второго суммирующего элемента соединен со вторым входом первого суммирующего элемента, а выход релейного. элемента соединен с выходной клеммой устройства и с управляющим входом управляемого ключа. На фиг. 1 представлена функциональная блок-схема релейного регулятора в составе системы управления, на фиг. 2 - переходные процессы на фазовом портрете системы.
Релейный регулятор 1 содержит трехпозиционный релейный элемент 2, охваченный цепью инерционной обратной связи, выполненной с использованием инерционного элемента 3, подключенного к суммирующему элементу 4. Входная клемма релейного регулятора соединена с одним входом суммируюш,его элемента 5 непосредственно, а с другим - через управляемый ключ 6. Выход суммирующего элемента 5 соединен со вторым входом суммирующего элемента 4, выход релейного элемента 2 соединен с входной клеммой регулятора 1 и с управляющим входом ключа 6. Входная клемма релейного регулячора 1 соединена с источником 7 сигнала ошибки управления объекта 8 управления.
Ось абсцисс на фиг. 2 соответствует величине ощибки управления X, а ось ординат - величине скорости ощибки управления X, а и b - границы трубок движения изображающей точки М в скользящем режиме, а Х и X, - границы зоны нечувствительности.
Принцип работы релейного регулятора основан на изменении величины гистерезиса релейного элемента в зависимости от абсолютной величины сигнала ошибки управления.
Система управления, в которой используется предлагаемый релейный регулятор, функционирует следующим образом.
Пусть в некоторый начальный момент, при котором напряжение на инерционном элементе Uj О, изображающая точка М (фиг. 2), характеризующая координаты процесса управления по величине отклонения X и скорости отклонения X, достигла границы зоны нечувствительности Х (фиг. 2 М), которая формируется релейным элементом 2. При срабатывании релейного элемента 2 на объект 8 управления поступает управляющий сигнал, поступающий также на управляющий вход ключа б, который по этому сигналу срабатывает, образуя цепь из последовательно включенных элементов 7, 6 и 2, и на вход элемента 3. Выходной сигнал элемента 3 (Uj) воздействует на вход элемента 2 через суммирующий элемент 4 в виде сигнала отрицательной обратной связи.
В формировании гистерезиса релейного элемента 2 участвует входной сигнал ошибки управления (Uy), поступающий в момент включения релейного элемента 2 на его вход через ключ 6. За счет действия сигнала U релейный элемент через время, определяемое соотнощением сигналов U, Uy и Uj, где U| - напряжение на ключе б, выключится, т. е. закончится формирование управляющего сигнала (фиг. 2, Mj(). При этом прекратится рост сигнала Uj и разомкнется управляемый ключ б.
При дальнейщем увеличении сигнала U/ вновь произойдет включение релейного элемента 2 (фиг. 2, Mj), и в дальнейщем процесс повторяется.
Таким образом формируется релейное управление в скользящем режиме в границах а и Ь. Граница а определяется динамическим положением на фазовой плоскости уровня включения релейного элемента 2, а граница b - уровнем отключения.
Скользящий режим закончится, когда изображающая точка изменит знак своей скорости (фиг. 2, М).
Величина гистерезиса выражается следующим образом;
А Ака1+ А где Д Mff- начальный гистерезис релейного
элемента;
Д„„ приращение величины гистерези птскса, зависящее от величины сигнала ощибки управления.
Так как помехоустойчивость релейной системы в значительной степени зависит от величины гистерезиса, то ее увеличение в процессе управления позволяет увеличить помехоустойчивость системы управления в целом. При этом за счет выбора начального гистерезиса обеспечивают необходимое качество поддержания установившегося процесса.
Формула изобретения
Релейный регулятор, содержащий релейный элемент с инерционным элементом в цепи отрицательной обратной связи и суммирующий элемент, один вход которого соединен с выходом инерционного элемента, а выход - со входом релейного элемента, отличающийся тем, что, с целью повышения стабильности к внешним возмущениям, в него введен управляемый ключ и второй суммирующий элемент, один вход которого соединен с входной клеммой регулятора непосредственно, а второй - через управляемый ключ, выход второго суммирующего элемента соединен со вторым входом первого суммирующего элемента, а выход релейного элемента соединен с выходной клеммой устройства и с управляющим входом управляемого ключа.
Источники информации, принятые во внимание при экспертизе
